КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системы управления рабочими процессами машин
|
|
|
|
Автоматизация строительных и дорожных машин ведется в основном по трем направлениям, обеспечивающим управление пространственным положением рабочих органов машин, оптимизацию наиболее энергоемких режимов работы машин и создание на основе лазерной техники комплексной автоматизированной системы управления технологическими процессами в строительстве.
Первое направление автоматизации содержит вопросы повышения планирующих свойств машин для получения заданных профиля и уклона поверхности, так как эти виды работ требуют значительных затрат времени и трудоемкости, а невыполнение требований существенно снижает качество работ, вызывает перерасход материалов и т.п. Это направление обеспечивается унифицированным рядом систем автоматики типа «Профиль» с микроэлектронными блоками управления, которые делятся на автономные, копирные и комбинированные.
Автономные системы обеспечивают контроль положения рабочих органов относительно вертикали с помощью рассмотренных выше бортовых датчиков, обычно маятникового типа. В копирных системах датчик, установленный на одной стороне машины, по ходу контролирует положение рабочего органа в соответствии с заданным профилем - по натянутому тросу, лучу лазера, точно построенной полосе дороги или бордюра. В комбинированных системах, к которым относится и «Профиль-30», требуемый уклон рабочего органа в поперечной плоскости обеспечивается автономным датчиком, а его высотное положение - по копирному устройству. Рассмотрим принцип действия этой системы в общем случае (рис.199).
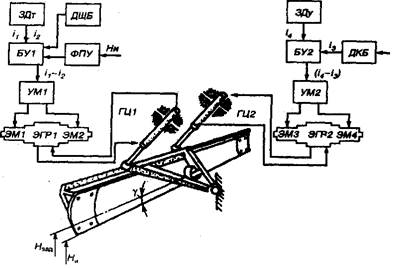 Рис.199. Функциональная схема системы «Профиль-30»
Рис.199. Функциональная схема системы «Профиль-30»
|
Обычно рабочий орган землеройной, профилировочной или укладочной машины при их движении по неровной поверхности перемещается по высоте относительно заданного положения Нзад. В этом случае щуповой датчик ДЩВ или фотоприемное устройство ФПУ лазерного излучения определяют отклонение одной из кромок рабочего органа относительно копирной поверхности. При этом выходной сигнал i2 поступает в первый микроэлектронный блок управления БУ1 и сравнивается с сигналом i1 задатчика толщины срезаемой стружки ЗДТ. Разность сигналов (Δi1-2=i1-i2) проходит через первый усилитель мощности УМ1 и поступает на электромагниты ЭМ1 и ЭМ2 первого электрогидравлического распределителя ЭГР1, который направляет требуемый поток рабочей жидкости в одну из полостей гидроцилиндра ГЦ1. Перемещение поршня со штоком изменяет высоту НИ управляемой кромки рабочего органа до совпадения ее с требуемым положением НЗАД.
При осуществленном изменении высоты первой кромки рабочего органа или наклоне машины в процессе ее движения по неровностям рабочим органом совершаются угловые перемещения в поперечной плоскости относительно вертикали. В этом случае в работу включается второй автономный канал управления системы. Автономным маятниковым датчиком ДКБ измеряется величина угла поперечного наклона рабочего органа, которая преобразуется в электросигнал i3 и подается в блок управления БУ2. Здесь i3 сравнивается с сигналом i4 задатчика ЗДу угла наклона, управляемого машинистом-оператором. При возникшем рассогласовании разность этих сигналов подается в усилитель мощности УМ2, а из него на электромагниты ЭМЗ и ЭМ4 электрогидрораспределителя ЭГР2, направляющего поток рабочей жидкости в требуемую полость гидроцилиндра ГЦ2. Перемещение штока гидроцилиндра поднимает или опускает вторую кромку рабочего органа до углового положения γ, равного заданному углу γЗАД.
Второе направление автоматизации машин обеспечивает автоматизацию наиболее энергоемких технологических процессов, позволяющих максимально использовать тяговые возможности машин, снизить расход топлива, износ ходовой части, облегчить труд машиниста и т. п. Для оптимизации силового контура и регулирования рабочих процессов разработаны унифицированные системы типа «Режим». При этом изменение тягово-скоростных характеристик машин позволяет управлять нагрузкой при автоматическом заглублении и выглублении рабочего органа. Управляющим параметром может быть скорость машины, обороты двигателя или гидротрансформатора, угловое положение тяговой рамы или толкающего бруса, а также их сочетание в случае, например, буксования движителей. Стабилизация каждого из этих параметров осуществляется при заданных ограничениях на другие. В строительных машинах эта система может использоваться как автономно, так и совместно с системами типа «Профиль».
Принцип работы такой системы представлен на рис.200. Для предотвращения остановки двигателя при перегрузке в процессе копания аппаратура обеспечивает стабилизацию частоты вращения вала двигателя nДВ на заданном уровне n3. При этом сигнал датчика частоты вращения ДЧВ сравнивается с заданным значением частоты n3, после чего вырабатывается сигнал на подъем или опускание рабочего органа. Одновременно с этим измеряются и сравниваются со своими граничными значениями такие параметры, как угловое положение, скорость и буксование. При достижении граничных значений управление отключается и вырабатывается команда на выглубление рабочего органа.
В процессе транспортирования грунта обеспечивается поддержание действительной скорости машины на заданном уровне.
При планировочных работах система «Режим» работает совместно с системой «Профиль». В этом случае разность частот вращения вала (nДВ - n3).усиливается по мощности и подается на блок управления «Профиль» вместе с выходным сигналом задатчика толщины срезаемой стружки. Это обеспечивает непрерывную регулировку толщины стружки и нагрузки, действующей на отвал, а также и частоты вращения вала двигателя.
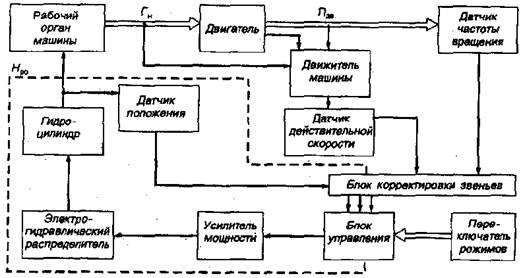 Рис.200. Функциональная схема аппаратуры «Режим»
Рис.200. Функциональная схема аппаратуры «Режим»
|
Третье направление автоматизации машин является наиболее прогрессивным и нацелено на совершенствование технологии и организации строительных работ путем создания на базе лазерной и микропроцессорной техники комплексной системы дистанционного программного или автоматического управления машинами, а также приборов оперативного контроля качества укладываемых дорожно-строительных материалов. Эти системы управления предназначены в основном для машин, занятых на строительстве дорог, мелиоративных и других сооружений. Системы управления с помощью лазерной техники обеспечивают и контролируют требуемые высотные отметки, продольный и поперечный профиль разрабатываемых и укладываемых дорожно-строительных материалов для каждой машины, работающей в любой точке строительной площадки. Рассмотрим работу такой системы на примере комплекта аппаратуры «Дорога» (рис.201).
Система управления состоит из задающей I, контрольно-следящей II и программно-управляющей III частей. Задающая часть с помощью лазерного излучателя устанавливает параллельно проектной поверхности дороги световую опорную плоскость. При этом оптический пучок в приборе подается на пентопризму, которая разворачивает излучение на 90° и осуществляет его вращение вокруг вертикальной оси излучателя.
Контрольно-следящая часть включает в себя фотоприемное устройство (ФПУ), установленное на штанге механизма перемещения (МП), которая закреплена на рабочем органе машины, в данном случае на отвале. ФПУ служит для преобразования лазерного сигнала в электрический, поступающий в блок выработки команд управления (БВК), где формируются управляющие сигналы для исполнительных механизмов с одновременным отображением на информационном табло-индикаторе положения режущей кромки отвала относительно проектной поверхности.
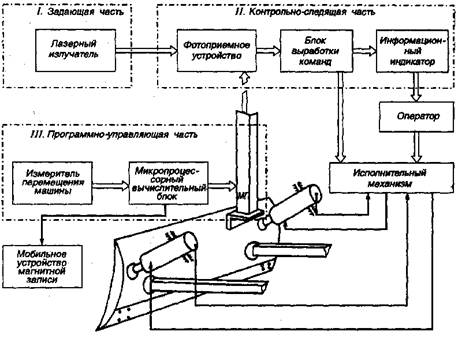 Рис.201. Функциональная схема аппаратуры «Дорога»
Рис.201. Функциональная схема аппаратуры «Дорога»
|
Программно‑управляющая часть состоит из измерителя перемещения машины, микропроцессорного вычислительного блока выработки команд управления высотным положением ФПУ, механизма перемещения ФПУ и устройства для магнитной записи данных. При работе в ручном режиме оператор по показаниям индикатора сам устанавливает требуемое положение рабочего органа. В автоматическом режиме управляющие сигналы с БВК подаются на исполнительный механизм, т.е. на систему типа «Профиль». ФПУ автоматически удерживается в плоскости лазерного излучения, а величина его перемещения несет информацию о неровностях возводимой дороги. Необходимый уклон возводимой поверхности на постоянных продольных участках поверхности может задаваться отклонением оси излучателя от вертикали.
| При работе на переходных вертикальных кривых требуется более сложное управление машиной, которое обеспечивается программным устройством. В этом случае микропроцессор рассчитывает необходимое высотное положение рабочего органа и формирует сигнал для механизма перемещения. При изменении положения ФПУ по высоте в БВК вырабатывается сигнал управления, по которому рабочий орган поднимается или опускается на высоту перемещения ФПУ. Такая система обладает большими возможностями, т.к. световая опорная поверхность позволяет не только управлять работой машины или комплекта машин, но и осуществлять постоянный геодезический контроль высотных отметок в любой точке и на любом этапе строительства дороги. Рассмотрим используемые системы автоматического управления рабочими органами для различных строительных и дорожных машин и оборудования. |
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 522; Нарушение авторских прав?; Мы поможем в написании вашей работы!