КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Автоматизация скреперов
|
|
|
|
Скреперы нашли широкое применение на послойной разработке грунта и точной планировке под заданные отметки крупных строительных площадок и дорог. Для этого прицепные гидроуправляемые скреперы оборудованы автоматической аппаратурой, обеспечивающей автоматическое управление положением ковша по высоте, перемещением задней стенки и выглублением ковша при перегрузке для предотвращения отключения силовой установки. Использование автоматизированных скреперов позволяет повысить: производительность труда за счет сокращения числа проходов; качество выполняемых работ; улучшить условия работы машиниста.
Для точной планировки под заданные отметки и получения различных уклонов земляной поверхности используют аппаратуру «Копир-Стабилоплан-10Л» (рис.206) с лазерным устройством. В состав аппаратуры входят электрогидрораспределитель 1, пульт с блоком управления 2, механизм перемещения 3 с ФПУ,
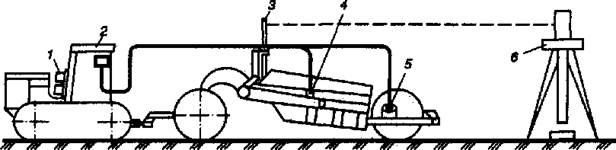 Рис.206. Скрепер с системой «Копир-Стабилоплан-10Л» с лазерным устройством
Рис.206. Скрепер с системой «Копир-Стабилоплан-10Л» с лазерным устройством
|
датчики управления КВД задней стенкой ковша 4 и углового положения ДКБ рамы скрепера 5. В этой системе автоматическая стабилизация положения ножа скрепера может осуществляться с помощью датчика углового положения ДКБ или автономной системой управления, или копирной по лучу лазера. Этот датчик устанавливается на буфере ковша скрепера и предназначен для преобразования перемещения своего корпуса относительно вертикали в электрический сигнал, передаваемый после усиления и замера рассогласования на исполнительный механизм.
Пульт с блоком управления и защиты от перегрузок расположен в кабине машиниста. При этом переход с автономного управления на копирный производится простым переключателем, установленным в блоке управления.
В копирном режиме управления система обеспечивает стабилизацию ножа скрепера по высоте. Работа этой системы аналогична ранее рассмотренным и осуществляется с помощью ФПУ, установленного в передней части ковша скрепера и контролирующего положение режущей кромки ковша относительно лазерной направляющей 6.
Защита двигателя от перегрузки обеспечивается чувствительным элементом, которым является датчик частоты вращения вала двигателя — тахогенератор ТГ. Его сигналы после сравнения и усиления передаются на исполнительные механизмы, изменяющие в ту или другую сторону заглубление рабочего органа скрепера.
При движении скрепера под уклон и на выемках подсыпка грунта производится автоматически путем принудительного его выталкивания задней стенкой скрепера. Это осуществляется с помощью датчиков управления задней стенкой КВД (установленных на ковше скрепера и представляющих собой бесконтактные выключатели), сравнивающего устройства, усилителя, исполнительного механизма (гидроцилиндра перемещения задней стенки). Автоматическую остановку задней стенки скрепера при достижении последней крайних положений обеспечивают конечные выключатели типа ВК-200, установленные на направляющей ковша скрепера.
Автоматическое выдвижение задней стенки ковша происходит в процессе движения скрепера при положении режущей кромки выше уровня передних колес, а ее возвращение в исходное положение — при опускании ножа. Это контролируется датчиками выдвижения и возврата стенки, установленными на раме скрепера. При подъеме ковша на 3...5 см выше уровня передних колес срабатывает один из датчиков и стенка выдвигается и выталкивает грунт, а при резании стружки грунта толщиной более 1 см другой датчик направляет заднюю стенку в противоположную сторону, освобождая место для набора грунта. Требуемая глубина резания устанавливается дистанционно из кабины машиниста задатчиком, а контролируется датчиками ДКБ, ФПУ, ТГ и КВД и управляется электромагнитами гидрозолотников, воздействующими на гидроцилиндры ковша скрепера.
Аппаратура «Стабилоплан-10» предназначена только для автоматического управления положением ковша по высоте и состоит из датчика углового положения ДКБ, пульта и блока управления и гидрораспределителя. Такая система обеспечивает точную планировку поверхности в автономном автоматическом режиме.
Стабилизация тягового усилия землеройно-транспортных машин также может осуществляться автоматически. Схема стабилизации на примере прицепного скрепера приведена на рис.207. Она включает в себя датчик тягового усилия I, регулятор // и привод управления III. Объектом регулировки является рабочий орган машины - ковш. Его положение определяет значение независимого параметра регулирования - толщины срезаемой стружки грунта. Именно от этого параметра зависит величина нагрузки. Стабилизация тягового усилия осуществляется следующим образом. При работе скрепера тяговое усилие посредством гидравлического динамометра 1 преобразуется в перемещение штока мерного гидроцилиндра 2, который через зубчато-реечную передачу 3 вращает вал переключателя 4. Если сопротивление грунта соответствует тяговому усилию скрепера, переключатель расположен в нейтральном положении так, как показано на схеме. При увеличении или снижении нагрузки на режущий орган ковша
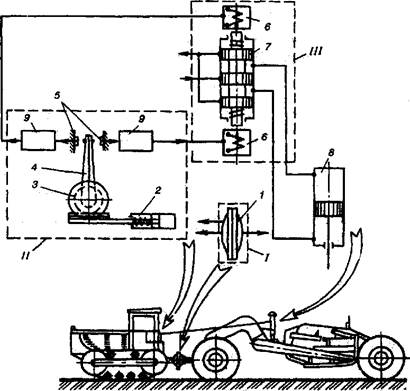 Рис.207. Схема стабилизации тягового усилия скрепера
Рис.207. Схема стабилизации тягового усилия скрепера
|
переключатель замыкает один из неподвижных контактов 5, в результате чего срабатывает одно из двух реле 9, воздействующее на соответствующий электромагнит 6. Электромагнит, в свою очередь, перемещает золотник гидрораспределителя 7 вверх или вниз и, включая гидроцилиндр 8, поднимает (выглубляет) или опускает (заглубляет) ковш.
В приводе механизма передвижения самоходных скреперов устанавливается гидромеханическая передача, позволяющая автоматически изменять скорость машины в зависимости от сопротивления движению.
В самоходных скреперах используется и восьмискоростная полуавтоматическая коробка с сервопереключением передач. Для создания высокого тягового усилия на колесах при загрузке и выгрузке ковша первые две передачи и задний ход работают с применением гидротрансформатора. Передачи 3...8 работают напрямую и предназначены для эффективного использования скорости при перемещениях по дорогам. Во время цикличной работы машинист выбирает наивысшую в зависимости от дороги передачу, а трансмиссия автоматически переводит ее на 2-ю при загрузке и выгрузке и вновь возвращает к назначенной скорости при перевозке.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 602; Нарушение авторских прав?; Мы поможем в написании вашей работы!