КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Равновесие системы сходящихся сил
|
|
|
|
Из законов механики следует, что твердое тело, на которое действуют взаимно уравновешенные внешние силы, может не только находиться в покое, но и совершать движение, которое мы назовем движением «по инерции». Таким движением будет, например, поступательное равномерное и прямолинейное движение тела.
Отсюда получаем два важных вывода: 1) Условиям равновесия статики удовлетворяют силы, действующие как на покоящееся тело, так и на тело, движущееся «по инерции». 2) Уравновешенность сил, приложенных к свободному твердому телу, является необходимым, но не достаточным условием равновесия (покоя) самого тела; в покое тело будет при этом находиться лишь в том случае, если оно было в покое и до момента приложения к нему уравновешенных сил.
Для равновесия приложенной к твердому телу системы сходящихся сил необходимо и достаточно, чтобы равнодействующая этих сил была равна нулю. Условия, которым при этом должны удовлетворять сами силы, можно выразить в геометрической или аналитической форме.
1. Геометрическое условие равновесия. Так как равнодействующая  сходящихся сил определяется как замыкающая сторона силового многоугольника, построенного из этих сил, то может обратиться в нуль тогда и только тогда, когда конец последней силы в многоугольнике совпадает с началом первой,т. е. когда многоугольник замкнется.
сходящихся сил определяется как замыкающая сторона силового многоугольника, построенного из этих сил, то может обратиться в нуль тогда и только тогда, когда конец последней силы в многоугольнике совпадает с началом первой,т. е. когда многоугольник замкнется.
Следовательно, для равновесия системы, сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнут.
2. Аналитические условия равновесия. Аналитически равнодействующая системы сходящихся сил определяется формулой
 .
.
Так как под корнем стоит сумма положительных слагаемых, то R обратится в нуль только тогда, когда одновременно  ,
,  ,
,  , т. е. когда действующие на тело силы будут удовлетворять равенствам:
, т. е. когда действующие на тело силы будут удовлетворять равенствам:



Равенства выражают условия равновесия в аналитической форме: для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на каждую из трех координатных осей были равны нулю.
Если все действующие на тело сходящиеся силы лежат в одной плоскости, то они образуют плоскую систему сходящихся сил. В случае плоской системы сходящихся сил получим, очевидно, только два условия равновесия
Равенства выражают также необходимые условия (или уравнения) равновесия свободного твердого тела, находящегося под действием сходящихся сил.
Пример 1. На рис.15 показаны три силы. Проекции сил  и
и  на оси х, у, z очевидны:
на оси х, у, z очевидны:





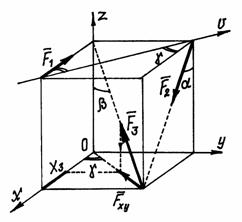
Рис.15
| Рис. 2.4. |
А чтобы найти проекцию силы  на ось х нужно использовать правило двойного проектирования.
на ось х нужно использовать правило двойного проектирования.
Проектируем силу сначала на плоскость х О у, в которой расположена ось (рис.15), получим вектор  , величиной
, величиной  а затем его проектируем на ось х:
а затем его проектируем на ось х: 
Аналогично действуя, найдём проекцию на ось у:  .
.
Проекция на ось z находится проще:  .
.
Нетрудно убедиться, что проекции сил на ось V равны:



При определении этих проекций удобно воспользоваться рис.16, видом сверху на расположение сил и осей.
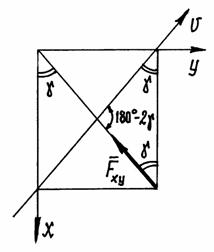
Рис.16
Вернёмся к системе сходящихся сил (рис. 17). Проведём оси координат с началом в точке пересечения линий действия сил, в точке О.
Мы уже знаем, что равнодействующая сил  . Спроектируем это векторное равенство на оси. Получим проекции равнодействующей на оси x, y, z:
. Спроектируем это векторное равенство на оси. Получим проекции равнодействующей на оси x, y, z:

Они равны алгебраическим суммам проекций сил на соответствующие оси. А зная проекции равнодействующей, можно определить и величину её как диагональ прямоугольного параллелепипеда  или
или
 .
.
Направление вектора найдём с помощью направляющих косинусов (рис.17):



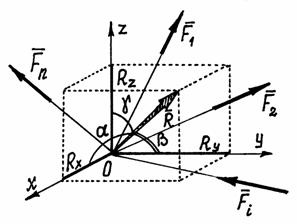
Рис.17
Пример 2. На шар, вес которого Р, лежащий на горизонтальной плоскости и привязанный к ней нитью АВ, действует сила F (рис.18). Определим реакции связей.
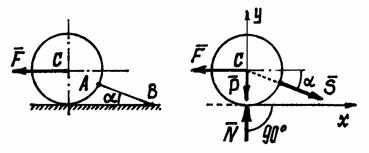
Рис.18
Следует сразу заметить, что все задачи статики решаются по одной схеме, в определённом порядке.
Продемонстрируем ее на примере решения этой задачи.
1. Надо выбрать (назначить) объект равновесия – тело, равновесие которого следует рассмотреть, чтобы найти неизвестные.
В этой задаче, конечно, объект равновесия – шар.
2. Построение расчётной схемы. Расчётная схема – это объект равновесия, изображённый отдельно, свободным телом, без связей, со всеми силами, действующими на него: реакциями и остальными силами.
Показываем реакцию нити  и нормальную реакцию плоскости –
и нормальную реакцию плоскости –  (рис.18). Кроме них на шар действуют заданные силы
(рис.18). Кроме них на шар действуют заданные силы  и
и  .
.
3. Надо установить какая получилась система сил и составить соответствующие уравнения равновесия.
Здесь получилась система сходящихся сил, расположенных в плоскости, для которой составляем два уравнения (оси можно проводить произвольно):

 ,
,


4. Решаем систему уравнений и находим неизвестные.


По условию задачи требовалось найти давление шара на плоскость. А мы нашли реакцию плоскости на шар. Но, по определению следует, что эти силы равны по величине, только давление на плоскость будет направлено в противоположную сторону, вниз.
Пример 3. Тело весом Р прикреплено к вертикальной плоскости тремя стержнями (рис.19). Определим усилия в стержнях.
Рис.19
В этой задаче объект равновесия – узел С вместе с грузом. Он нарисован отдельно с реакциями, усилиями в стержнях  ,
,  ,
,  , и весом . Силы образуют пространственную систему сходящихся сил. Составляем три уравнения равновесия:
, и весом . Силы образуют пространственную систему сходящихся сил. Составляем три уравнения равновесия:





Из первого уравнения следует: S 2 = S 3. Тогда из третьего:
 а из второго:
а из второго: 
Когда мы направляли усилие в стержне от узла, от объекта равновесия, предполагали, что стержни работают на растяжение. Усилие в стержне CD получилось отрицательным. Это значит – стержень сжат. Так что знак усилия в стержне указывает как работает стержень: на растяжение или на сжатие.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 771; Нарушение авторских прав?; Мы поможем в написании вашей работы!