КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структурная формула плоского механизма
|
|
|
|
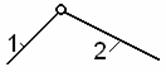
В плоском механизме для соединения звеньев можно использовать только плоские кинематические пары четвертого и пятого классов (рис.2.14 и рис.2.15).
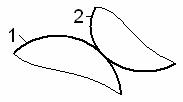
Рис.2.14. Пара IV класса
а) б)
Рис.2.15. Пары V класса: а – вращательная, б – поступательная
Пусть плоский механизм состоит из n подвижных звеньев; для соединения их между собой и для их присоединения к стойке использовано  пар четвертого и
пар четвертого и  пар пятого классов.
пар пятого классов.
Если на движение звена в плоскости не наложено никаких условий связи, то оно обладает тремя степенями свободы; следовательно, все подвижные звенья имеют (до их соединения кинематическими парами) 3 n степеней свободы; каждая пара четвертого класса является двухподвижной, т.е. из трех возможных относительных движений изымает одно; аналогично, каждая пара пятого класса является одноподвижной и из трех возможных движений изымает два. Тогда степень подвижности плоского механизма (или его число степеней свободы относительно стойки)
 (1)
(1)
Таким образом, нами получена структурная формула П. Л. Чебышева.
При расчете степени подвижности механизма по формуле (1) необходимо учитывать следующие, нередко встречающиеся ситуации:
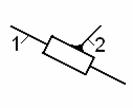
1) наличие кратных шарниров; так, соединение звеньев, показанное на рис. 2.16, необходимо считать как два шарнира, иначе расчет по (1) даст завышенное значение W;
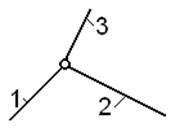
Рис.2.16. Двойной шарнир
2) наличие местных подвижностей, т.е. таких, устранение которых не повлияет на кинематику механизма; у механизма по рис. 1.3 при любом положении кулачка 1 коромысло 3 может занимать только одно (единственно возможное) положение; следовательно, у этого механизма заведомо W =1, однако расчет по формуле (1) приводит к явно завышенному значению

для получения достоверного результата нужно ролик 2 мысленно объединить с коромыслом 3 в одно звено (рис. 2.17, б), тогда фактическая подвижность механизма

.
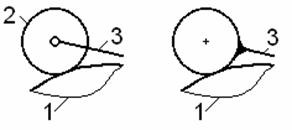
а) б)
Рис.2.17. Устранение местной подвижности
Отметим, что эти действия корректны только при круглом ролике, у которого геометрический центр совпадает с центром шарнира;
3) наличие пассивных (или избыточных) связей.
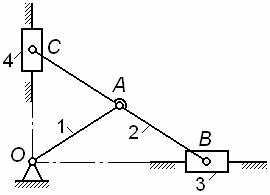
На рис. 2.18, а – г показаны четыре варианта исполнения механизма эллипсографа (длины звеньев  ).
).
Анализ кинематических свойств этих схем показывает следующее:
- у механизма по рис. 2.18, а подвижность W =1, траектория точки B – горизонтальная прямая; следовательно, без ущерба для подвижности и кинематики механизма допускается включение в его схему ползуна 3 (как в схеме по рис. 2.18, г);
- аналогично у механизма по рис. 2.18, б также W =1, а траектория точки C – вертикальная прямая и его схему можно заменить той же схемой 2.18, г постановкой ползуна 4;
- у механизма по рис. 2.18, в степень подвижности W =1 и траектория точки A – окружность радиуса OA; следовательно, без ущерба для подвижности и кинематики механизма в его схему можно включить кривошип 1 длиной , как в схеме по рис. 2.18, г.
Подытоживая, заключаем, что механизм по рис. 2.18, г кинематически эквивалентен любому из трех остальных механизмов; однако расчет по формуле (1) приводит к заведомо заниженному результату

т.е. формально – это не механизм, а ферма, что противоречит фактам. В таких случаях говорят, что механизм имеет избыточные или пассивные связи, которые, хотя и присутствуют в механизме, не влияют на его кинематику.
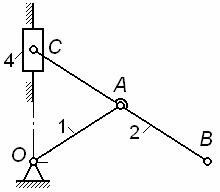
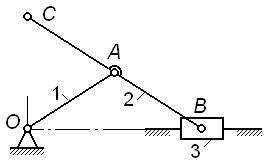
а) б)
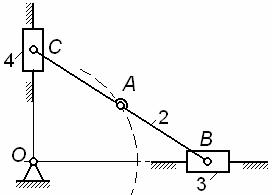
в) г)
Рис.2.18
От пассивных связей при структурном анализе механизмов следует избавляться: в данном случае, в зависимости от смысла решаемой задачи, цель достигается удалением одного из звеньев – 1, 3 или 4 (вместе с соответствующим кинематическими парами). Тогда

что соответствует истине.
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 443; Нарушение авторских прав?; Мы поможем в написании вашей работы!