КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Показатели качества процессов управления
|
|
|
|
Устойчивость системы автоматического управления — необходимое, но далеко не достаточное условие рациональности ее применения. Очевидно, что устойчивая система при отработке различных воздействий может оказаться недостаточно точной, переходные процессы управления могут затухать чересчур медленно (недостаточное быстродействие), не будет обеспечена требуемая плавность изменения выхода, т.е. система не сможет достаточно хорошо осуществить автоматическое управление.
Комплекс требований, определяющих поведение системы в установившемся и переходном процессах отработки заданного воздействия, объединяется понятием качества процесса управления (качества системы). Требования этого комплекса выдвигаются практикой.
Задача анализа (исследования) процессов управления — установить, какое влияние оказывает структура системы и значение ее параметров на процесс управления и показатели его качества, а также выяснить, насколько та или иная система удовлетворяет предъявленным к ней требованиям.
Выбор структуры и параметров системы управления, в соответствии с требованиями качества, относится к задаче синтеза.
В подавляющем большинстве практических задач исследование системы ограничивают стандартными случаями: отработкой единичного импульса, единичного скачка, единичного сигнала постоянной скорости или гармонического сигнала.
Для этих элементарных случаев разработаны прямые показатели качества переходных процессов.
При исследовании систем программного управления бывает необходимо находить реакцию системы на произвольный сигнал.
Рассмотрим структурную схему, изображенную на рисунке 2.4.1. На систему автоматического управления с передаточной функцией  , состоящую из объекта управления
, состоящую из объекта управления  , устройства управления в прямом тракте
, устройства управления в прямом тракте  и устройства управления в цепи обратной связи
и устройства управления в цепи обратной связи  , действуют управляющий сигнал x и возмущение f.
, действуют управляющий сигнал x и возмущение f.
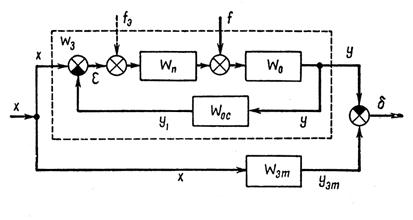
Рисунок 2.4.1 – Структурная схема системы автоматического управления
Качество процессов отработки типовых сигналов x и f порознь оценивают либо непосредственно по управляемой переменной системы — её выходу y, либо по ошибке системы  , представляющей собою разность между выходом исследуемой системы и выходом некоторой идеальной эталонной линейной системы
, представляющей собою разность между выходом исследуемой системы и выходом некоторой идеальной эталонной линейной системы  ,
,
 (2.4.1)
(2.4.1)
Согласно рисунку 2.4.1, изображение
 (2.4.2)
(2.4.2)
Эталонная передаточная функция должна соответствовать заданному линейному динамическому преобразованию входного сигнала  в требуемый сигнал
в требуемый сигнал  замкнутой системы. Так, для системы автоматического регулирования в идеальном случае y должно быть равно x, откуда
замкнутой системы. Так, для системы автоматического регулирования в идеальном случае y должно быть равно x, откуда  ; в системе копирования с изменением масштаба
; в системе копирования с изменением масштаба  , откуда
, откуда  ; в интеграторе требуется, чтобы
; в интеграторе требуется, чтобы  , и, следовательно,
, и, следовательно,  . Если же исследуется реакция системы на возмущение, то обычно
. Если же исследуется реакция системы на возмущение, то обычно  , поскольку требуется, чтобы
, поскольку требуется, чтобы  при любых изменениях
при любых изменениях  .
.
Далеко не во всех случаях целесообразно предъявлять к системе такие предельно идеализированные жесткие требования. Безынерционную систему с передаточной функцией не только нельзя физически реализовать, поскольку в ней должны возникать сигналы неограниченно большой мощности, но это и нецелесообразно, так как такая система не может осуществить фильтрацию помех.
Рациональный выбор эталона сравнения  с учётом задач управления и реальных возможностей аппаратуры относится к теории оптимальных систем.
с учётом задач управления и реальных возможностей аппаратуры относится к теории оптимальных систем.
Разность между управляющим сигналом x и выходом системы  представляет собой рассогласование
представляет собой рассогласование
 (2.4.3)
(2.4.3)
Согласно рисунку 2.4.1,
 (2.4.4)
(2.4.4)
На рисунке 2.4.2, а показан пример процесса отработки системой автоматического регулирования управляющего воздействия . Соответствующие графики ошибки и рассогласования  для
для  , следовательно,
, следовательно,  приведены на рисунке 2.4.2, б. В качестве
приведены на рисунке 2.4.2, б. В качестве  выбрана некоторая гладкая кривая.
выбрана некоторая гладкая кривая.
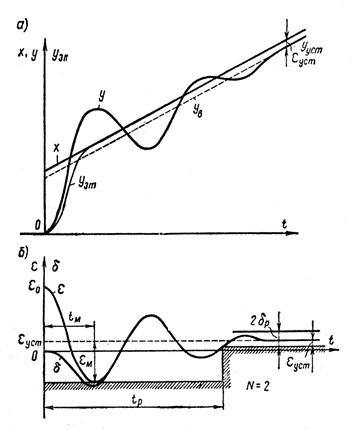
Рисунок 2.4.2 – Отработка управляющего воздействия
Рассмотрим прямые показатели качества этого процесса применительно к рассогласованию системы. Различают следующие показатели:
1) установившееся рассогласование, определяющее точность системы,
 (2.4.5)
(2.4.5)
В частном случае 
2) время регулирования  , которое служит основной характеристикой быстродействия системы и определяется из условия малости переходной составляющей,
, которое служит основной характеристикой быстродействия системы и определяется из условия малости переходной составляющей,
 (2.4.6)
(2.4.6)
где δр — заранее заданное значение, определяемое точностью системы;
3) максимальное перерегулирование εм, которое совместно с показателями 4) и 5) характеризует плавность протекания переходных процессов (демпфирование системы). Оно определяется как наибольший выброс управляемого процесса относительно установившегося  (рисунок 2.4.2). Зачастую вводят относительную (безразмерную) характеристику перерегулирования
(рисунок 2.4.2). Зачастую вводят относительную (безразмерную) характеристику перерегулирования
где  — некоторое базовое значение.
— некоторое базовое значение.
4) время максимального перерегулирования  , при котором
, при котором
 (2.4.7)
(2.4.7)
5) число перерегулирований N в интервале  , определяемое как число выбросов, для которых
, определяемое как число выбросов, для которых
 (2.4.8)
(2.4.8)
Из рисунка 2.4.2 видно, что первые три показателя определяют зону, ограничивающую рассогласование системы в ходе процесса управления. Граница этой зоны выделена на рисунке штрихованными прямыми.
С помощью аналогичных показателей можно оценить качество системы по ее выходу или ошибке .
Если при исследовании качества системы автоматического регулирования принято в качестве эталона и , то
 (2.4.9)
(2.4.9)
т.е. ошибка системы равна её рассогласованию и структурная схема, изображенная на рисунке 2.4.1, может быть представлена в виде схемы, показанной на рисунке 2.4.3. Поэтому часто ошибка отождествляется с рассогласованием. На рисунке 2.4.3  ― передаточная функция разомкнутой системы ();
― передаточная функция разомкнутой системы ();  — эквивалентное возмущение, приведенное ко входу прямого тракта. Из рисунка 2.4.1 согласно правилам преобразования структурных схем следует, что
— эквивалентное возмущение, приведенное ко входу прямого тракта. Из рисунка 2.4.1 согласно правилам преобразования структурных схем следует, что
 (2.4.10)
(2.4.10)
и
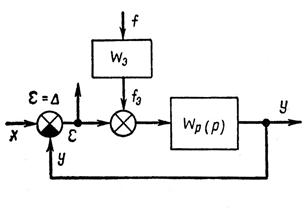
Рисунок 2.4.3 – Структурная схема системы автоматического управления
Для того чтобы непосредственно применить оценку процесса управления по прямым показателям качества, необходимо построить или экспериментально зарегистрировать этот оцениваемый процесс.
Методы, позволяющие непосредственно осуществить построение исследуемого процесса, называются прямыми методами анализа качества. Процессы управления в замкнутой системе при заданном воздействии описываются неоднородными линейными дифференциальными уравнениями с постоянными коэффициентами, поэтому прямые методы анализа качества совпадают с методами решения уравнений этого типа.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 675; Нарушение авторских прав?; Мы поможем в написании вашей работы!