КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Непрерывность
|
|
|
|
Классификация систем автоматического управления.
Типовая функциональная схема системы автоматического управления.
1.
Примеры объектов управления
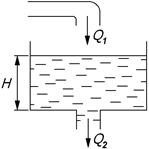
у = Н - управляемая величина (уровень жидкости);
х = Q1 - управляющее воздействие (приток жидкости);
z = Q2 – нагрузка (расход жидкости).
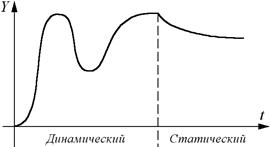
Динамическая характеристика:
где S – площадь поперечного сечения резервуара.
Y = f(X, Z, t) – взаимосвязь всех координат.
Каждый объект характеризуется двумя характеристиками (режимами): статической и динамической.
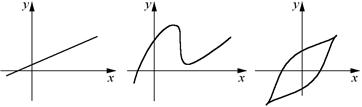
Статическая характеристика (установившийся режим) – это характеристика, в которой постоянное входное воздействие Х и возмущение Z постоянны во времени, тогда управляемая величина Y = f(X,Z).
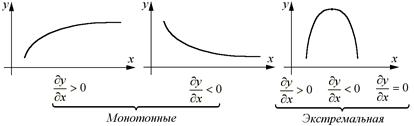
Статические характеристики бывают монотонные и экстремальные.
Частным случаем статической характеристики является квазистатическая характеристика, когда на вход подается гармоническое воздействие (sin), тогда в установившемся режиме тоже будет гармоническая величина.
Динамическая характеристика, когда управляемая величина Y не является постоянной во времени и описывается следующим уравнением: Y(t) = f(X(t), Z(t), t). Все переменные описываются системой обыкновенных дифференциальных уравнений (ОДУ), либо системой нелинейных дифференциальных уравнений (НДУ).
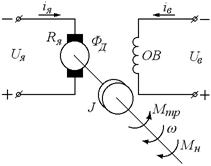
2. Электродвигатель постоянного тока.
Фд - магнитный поток двигателя;
iя - ток якоря двигателя;
Uя - напряжение якоря двигателя;
Rя - сопротивление якоря двигателя;
iв - ток обмотки возбуждения;
Uв - напряжение обмотки возбуждения;
Мтр - момент трения, возникающий на валу двигателя;
w - частота вращения вала двигателя;
J - момент инерции механизма, приведенного к валу двигателя;
Мнагр - момент нагрузки на валу двигателя.
Запишем уравнения:
 - динамические характеристики.
- динамические характеристики.
При статической характеристике все производные зануляются.
a1 и c1 -конструктивные параметры двигателя;
Фд - является нелинейной функцией от тока возбуждения;
Мтр - является нелинейной функцией от частоты вращения вала двигателя;
Управляющим воздействием является Х = Uя(Uв), управляемой величиной – У = w, нагрузка (внешнее воздействие) – Z = Uв(Uя), Мнагр, Мтр – помеха.
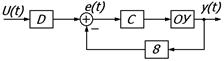
U(t) – задающее воздействие (общий сигнал в систему),
x(t) – управляющее воздействие (то, что вырабатывает регулятор),
y(t) – управляемая величина,
e(t) – отклонение (ошибка) управляемой величины от задающего воздействия.
Структура САУ:
1 - Задающее устройство, которое преобразует входной сигнал U(t) в сигнал, удобный для дальнейшего использования;
Å 2 - сравнивающее устройство, вырабатывает сигнал ошибки (отклонения) как разность задающего сигнала и управляемой величины;
3 - преобразующее устройство, преобразует сигнал ошибки в другую форму, удобную для дальнейшего использования, при этом не выполняются функции усиления и коррекции (пример: электрическая®механическая);
4 и 8 - корректирующие устройства, улучшают динамические свойства регулирования и повышают устойчивость. В зависимости от включения бывают параллельными или последовательными. 4 - последовательная коррекция, 8 - параллельная коррекция.
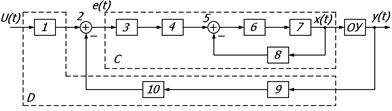
Å 5 - сравнивающее устройство местной обратной связи;
6 -усилительное устройство, усиливает мощность сигнала;
7 - исполнительное устройство, вырабатывает управляющее воздействие x(t) непосредственно на объект управления;
9 - чувствительный элемент, фиксирует (измеряет) управляемую величину y(t);
10 - элемент главной обратной связи, преобразует управляемую величину y(t) в вид, удобный для сравнения с задающим сигналом;
ОУ - объект управления.
Блоки 1, 10, 9 образуют датчик, а блоки 3, 4, 5, 6, 7, 8 – сервомеханизм.
Тогда, с учетом укрупнений, получим:
Датчик измеряет управляемую величину и задающую. Сервомеханизм вырабатывает и реализует управляющее воздействие.
Реальная САУ может не содержать некоторые из рассматриваемых пронумерованных блоков. Некоторые блоки могут объединяться. То, что называли блоками, носит название звеньев. И регулятор, и ОУ могут состоять из нескольких звеньев.
 Два сигнала – входной и выходной.
Два сигнала – входной и выходной.
Классификационные признаки САУ выделяют три крупные группы:
1. Классификация по характеру динамических процессов в системе.
2. Классификация по характеристикам управления.
3. Классификация по другим признакам.
4.
2.3.1. Классификация по характеру динамических процессов в системе
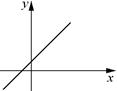
а) САУ бывают непрерывные - это такие системы, в которых во всех звеньях непрерывному во времени входному сигналу соответствует непрерывный во времени выходной сигнал.
Для того чтобы система была непрерывная, необходимо наличие непрерывных статических характеристик системы.
б) дискретные САУ- это такие системы, в которых хотя бы в одном звене непрерывному входному сигналу соответствует дискретный выходной сигнал (или импульс). Такое звено, называется импульсным.

К дискретным системам, как разновидность, относятся цифровые САУ, в которых функции регулятора выполняет цифровое устройство, а выходная величина представляет собой цифры.
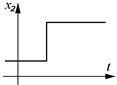 в) релейные САУ (системы релейного действия) - это системы, в которых хотя бы в одном звене непрерывной входной величине соответствует выходная величина, изменяющаяся скачком.
в) релейные САУ (системы релейного действия) - это системы, в которых хотя бы в одном звене непрерывной входной величине соответствует выходная величина, изменяющаяся скачком.
Статическая характеристика релейных систем имеет точку разрыва.
2. Линейность.
а) 1. Обыкновенные линейные системы (с сосредоточенными параметрами) – это такие системы, в которых в каждом из звеньев динамические процессы описываются обыкновенными линейными уравнениями. Статическая характеристика таких систем имеет линейный вид. Параметры (коэффициенты) этой системы постоянны во времени.
а) 2. Особые линейные системы, среди которых различают:
1. линейные системы с переменными параметрами - это такие САУ, в которых хотя бы одни параметры системы изменяются во времени, например, коэффициент усиления.
2. линейные САУ с распределенными параметрами - это такие САУ, динамика которых описывается частными производными.
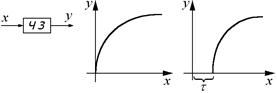
3. линейные системы с запаздыванием - это такие САУ, в которых присутствует хотя бы одно звено чистого запаздывания (непрерывному входному сигналу соответствует непрерывный выходной сигнал, сдвинутый по времени на t, где t - время запаздывания).
б) Нелинейные системы - это такие САУ, в которых хотя бы одно звено описывается нелинейным уравнением или имеется нелинейность иного вида, такая как произведение двух переменных, квадратный корень, степень и др.
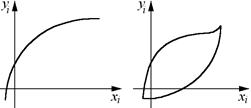
Среди нелинейных систем также выделяют особые нелинейные системы:
б) 1. нелинейные системы с переменными параметрами;
б) 2. нелинейные системы с распределенными параметрами;
б) 3. нелинейные системы с чистым запаздыванием;
б) 4. К нелинейным системам относятся релейные системы.
|
|
|
|
|
Дата добавления: 2014-01-05; Просмотров: 456; Нарушение авторских прав?; Мы поможем в написании вашей работы!