КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Эксплуатация систем «человек-машина». Системы «человек-машина»
|
|
|
|
В системах на основе ЭВМ значительное место занимают специфические вопросы согласования работы человека - «оператора» - и технологической части системы - «машины». Как самостоятельная проблема «человек-машина» возникла в явном виде совсем недавно. Обусловлено ее возникновение целым рядом факторов научно-технического прогресса:
· человека-оператора нельзя исключить ни из одной системы, сколь бы автоматизированной она ни была, остается хотя бы один человек;
· системный подход к изучению трудовой деятельности привел к выделению пограничной среды контакта «человек-машина» или системы «человек-машина» (СЧМ) в качестве самостоятельного поля научной деятельности, к появлению науки эргономики, объектом которой стала система «человек-машина-среда»;
· бурное развитие ЭВМ и информатизация общества ставят совершенно новые задачи перед разработчиками систем, базирующихся на ЭВМ;
· одной из коренных проблем человеко-машинных, или эргатических, систем является повышение Их надежности;
· значительное расширение круга операторских профессий, в которых ту или иную роль играют комплексы на основе ЭВМ;
· общее углубление представлений о взаимодействии человека и машины в процессе трудовой деятельности; неопределенность информации, лежащей на стыке наук (или сфер);
· машины могут предъявлять к человеку «нечеловеческие» требования. В результате стали раздаваться голоса, что «человеческий фактор» становится тормозом процесса. Однако автоматы, как, оказалось, могут не все, а человек кое в чем превосходит машины: он хорошо учитывает случайный характер явлений, может предсказать их развитие и др.;
· вопросам создания вычислительной техники (вообще - машин) уделяется много внимания проектировщиками, вопросами же организации контакта «человек-машина» занимаются гораздо меньше;
· возрастание цены ошибки оператора при очевидной невозможности все автоматизировать как по требованиям обеспечения надежности, так и из-за необходимости обеспечить разумную стоимость.
Эти и другие аналогичные соображения привели (около 30 лет назад) к появлению цикла научных дисциплин, предметом которых являются те или иные аспекты взаимодействия человека и машины, как в общей постановке, так и применительно к приложениям в конкретных областях. К числу этих дисциплин относятся инженерная психология, теория эргатических систем, эргономика, техническая эстетика, системы отображения информации и др.
В настоящей книге основное внимание уделено вопросам, касающимся контакта «человек-ЭВМ». Здесь можно выделить следующие проблемы:
· эргономическое проектирование систем, т.е. проектирование систем на основе ЭВМ с учетом «человеческого фактора»;
· инженерно-психологические исследования работы на ЭВМ как специфической трудовой деятельности;
· определение рационального разделения функций между человеком-оператором и программно-технической средой СЧМ.
Эргономическое проектирование. По существу этой проблемы необходимо согласовать с «человеческим фактором» все вопросы ввода-вывода (темп, формы представления и т. д.) и отображения информации; клавиатуры и другие органы управления; средства коммуникации; конструктивное исполнение устройств. В этих системах важную роль играют вопросы технической эстетики, целесообразного формирования предметно-пространственной среды (формы и контуры устройств, компоновка основных блоков, специальная мебель для оснащения рабочего места оператора, формирование окружающего его пространства). Специфические системы должны создаваться для операторов, работающих в экстремальных условиях. Широко разрабатываются в СЧМ специальные системы отображения информации - индикаторные и информационные панели, экраны, проекторы, пульты и т.д. с использованием различных технических средств.
Для пользователей универсальных ЭВМ круг этих вопросов сужается, естественно, до вопросов формирования пользовательского интерфейса, экранных форм и т.д. Однако и эти вопросы являются важными, если оператору в этой среде приходится работать длительное время и принимать важные решения. В задачах использования таких мощных средств, какими являются ЭВМ, необходимо тщательно учитывать все нюансы, в том числе и то, что в системе «человек-ЭВМ» функционирует человек как элемент.
Инженерно-психологический аспект. В инженерной психологии речь идет, прежде всего, об исследовании свойств человека-оператора в той или иной среде трудовой деятельности. В этот аспект входит или тесно к нему примыкает исследование даже физиологических процессов, обусловленных именно контактом человека с машиной в СЧМ (утомляемость, производительность и т.д.), для чего широко исследуется зрительный анализатор в самых различных аспектах: биомеханическом, нейрофизиологическом, кибернетическом и т.д.
Заметно расширились биомеханические и физиологические исследования нервно-мышечного аппарата в различных условиях как интеллектуальной, так и физической операторской деятельности. В этом круге вопросов решаются проблемы совершенствования размещения органов управления и систем отображения информации, оцениваются затраты нервно-мышечной энергии, напряженность рабочих поз и утомляемость оператора, сопоставляются различные компоновки оборудования рабочего места и т.д.
Исследование человека-оператора как элемента СЧМ, в конце концов, позволяет определить его различные характеристики: статические, динамические, информационные, логические, энергетические и т.д. На основе полученных при этом данных в ряде случаев составляется математическая модель оператора. Варианты моделей могут быть самыми разными. Так, иногда оператор отображается передаточной функцией W0(s), т.е. эквивалентной линейной динамической системой, отражающей его специфические свойства: способности к прогнозированию, инерционность, запаздывание в обработке информации; например, передаточной функцией вида
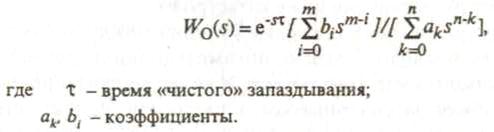
Эта модель используется при работе оператора в динамических системах управления процессами. В ряде ситуаций оператор описывается логической моделью, тем или иным автоматом, алгоритмом и т.п. Такие подходы приняты при описании оператора, участвующего в процессах ОИ и принятия решения.
Математическая модель оператора включается в модель СЧМ при исследовании системы в целом с учетом «человеческого» фактора. Такие «модельные» исследования позволяют значительно сократить натурную отработку систем, включающих оператора, и найти основные проектные решения по параметрам ЭВМ и оператора, т.е. предъявить требования к его состоянию здоровья, физиологическим параметрам, квалификации, характеру образования и подготовке.
Разделение функций в системе «человек-машина». Проблема разделения функций в системе «человек-ЭВМ» между оператором («человеком») и ЭВМ («машиной») должна специально изучаться и конкретно разрешаться. При расширении в СЧМ круга функций ее программно-аппаратного комплекса потребуются изучение и моделирование всех процессов, происходящих в системе. Алгоритмизация и программирование моделей потребуют дополнительных затрат на проектирование системы. Для реализации потребуется более мощная ЭВМ. Таким образом, произойдет удорожание СЧМ в целом, что нежелательно.
При расширении круга функций оператора возрастают требования к его квалификации, обученности, состоянию в процессе деятельности. В ряде случаев могут происходить сбои (срывы) в деятельности оператора по той или иной причине, в частности в экстремальных ситуациях: увеличение темпов представления информации оператору или ее объема выше допустимого предела приведет, в конце концов, к ошибочным реакциям (действиям, решениям), т.е. к ошибкам оператора. В результате в СЧМ может иметь место авария или даже катастрофа.
Таким образом, задача разделения функций между оператором и ЭВМ, как правило, - задача оптимизационная, решение которой отыскивается как компромисс. В качестве критерия оптимальности может рассматриваться, в частности, надежность выполнения системой ее функций в форме наиболее подходящей к случаю характеристики. Как у оператора, так и у ПАК с расширением круга функций снижается надежность.
При рассмотрении в целом СЧМ как системы с обратными связями необходимо учитывать, что совместно человек-оператор и ЭВМ реализуют в системе некоторый заданный набор функций, которые в процессе работы или при проектировании могут перераспределяться. При расчете надежности будет справедлива последовательная схема, в которой с ростом числа функций и снижением надежности одного элемента уменьшается число функций другого элемента и повышается его надежность, поэтому можно представить некоторое оптимальное по надежности распределение функций.
Аналогичные задачи приходится решать, например, при обслуживании ИС, пусконаладочных работах, тестировании или регламентных работах: можно тестировать ЭВМ как автоматически, так и «вручную», т.е. с пульта. Однако это давно не практикуется. Создаются специальные тестирующие программы. Их включают в состав АРМа оператора в среде ЭВМ, с помощью которого и осуществляется тестирование на заданную глубину. Более того, все больше функций контроля состояния ЭВМ автоматически реализуется аппаратно, т.е. с использованием специальных встроенных избыточных элементов, реализующих автоматический контроль.
Определение уровня избыточности в технических средствах, разделение функций между программной и аппаратной средой и, наконец, разделение функций между оператором, и ПАК - эти вопросы решаются при проектировании и при организации эксплуатации системы.
Надёжность систем «человек-машина»
В работе информационных систем возможны сбои, отказы, другие ситуации, приводящие к невыполнению системой ее функций. Менеджеру в таких условиях следует опираться на адекватные модели, или описания, происходящего.
Для упрощения описания ситуаций и повышения наглядности получаемых результатов обычно принимаются следующие допущения:
1) появление отказа технологической части системы, и возникновение ошибки оператора являются взаимно независимыми редкими случайными событиями, т.е. появление двух и более одноименных событий за период времени (t, t + del t) работы системы практически невозможно;
2) способность оператора работать без ошибок и возможность компенсации им возникших за период времени (t, t + del t) ошибок являются взаимно независимыми его свойствами.
Ниже приводятся типовые ситуации анализа надежности систем. В качестве характеристики надежности при этом используется вероятность безотказной работы. Как известно, на ее основе с помощью известных преобразований могут быть получены и все другие стандартные характеристики.
Первый вариант - системы с некомпенсируемыми ошибками оператора и неустранимыми отказами технологической части. Надежность таких систем, естественно, является минимальной. Она может повышаться как за счет роста потенциальной надежности технологической части системы, так и за счет повышения надежности работы оператора как компонента системы (эти мероприятия здесь не рассматриваются).
Человеко-машинная система исправна в какой-то момент или на интервале времени, если оператор не допустил ошибки и при этом исправна технологическая часть системы. Тогда вероятность р1(t1, del t) безотказной работы человеко-машинной системы на интервале времени del t от момента t1 до момента t2 = t1 + del t с учетом принятых допущений определяется выражением
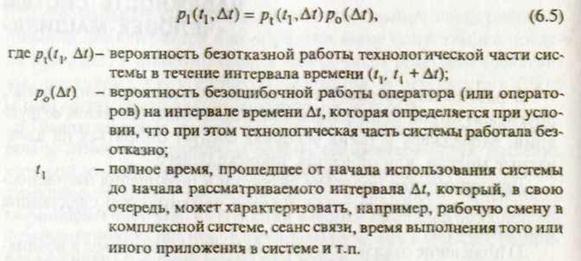
Здесь оба сомножителя - невозрастающие функции. Однако первый сомножитель pt (t1, del t) уже в начальный момент t1 может быть меньше единицы, поскольку он отражает ресурс надежности системы, оставшийся у нее к этому моменту вследствие износа. Сомножитель p0(del t) тоже убывает со временем, но его начальное значение равно единице, поскольку обычно оператор приступает к работе, находясь в функционально работоспособном состоянии. Убывание функции p0(del t) отражает снижение работоспособности оператора со временем, обусловленное его утомлением, воздействием посторонних факторов, увеличением в процессе работы объема информации, подлежащей обработке для принятия решения, и тому подобными причинами.
Второй вариант - системы с возможностью частичной компенсации ошибок оператора: оператор, допустивший ошибку в работе и вовремя заметивший ее появление, тут же ее исправляет. Во многих случаях создатели системы такую возможность обеспечивают, по крайней мере, для некоторых ошибок и для типовых условий их возникновения. В этих условиях можно принять, что такие ошибки оператора устраняются им мгновенно.
Если возникающие отказы технологической части системы при этом не устраняются, то система в целом исправна тогда, когда не возникло отказа в технологической части и оператор или не совершил ошибочных действий, или допустил ошибку (ошибки), но тут же заметил ее (их) и мгновенно устранил. Тогда для определения вероятности безотказной работы всей системы справедлива следующая формула:
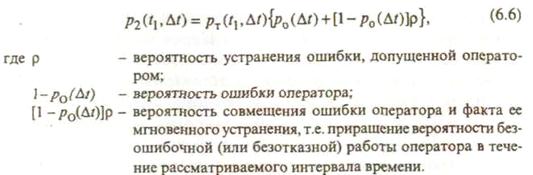
Из сопоставления формул (6.5) и (6.6) видно, что p2(t1, del t) > p1(t1, del t), хотя возможноp2(t1, del t) à p1(t1, del t), когда p à 0. Это бывает при снижении возможностей оператора устранить допущенную им ошибку по всем составляющим этого процесса: выявление, идентификация, устранение, каждая из которых характеризует определенные грани квалификации оператора. Как видно, обеспечивая для оператора квалификационную, структурную и технологическую возможность так называемого быстрого отката, позволяющего ему просто и быстро отказаться от замеченных ошибочных действий, создатели ИС могут ощутимо повысить ее надежность.
Третий вариант - системы с возможностью компенсации отказов технологической части системы при невозможности устранения ошибок оператора: в сложных, т.е. многоэлементных и имеющих разнообразные и множественные внутренние и внешние связи, системах обычно предусматриваются специальные возможности для автоматического устранения, по крайней мере, некоторых из возможных отказов. Так в системах обеспечивается свойство отказобезопасности, когда какое-то определенное число отказов не приводит к нарушению работоспособности системы как таковой. Контроль запаса надежности позволяет подкреплять надежность таких систем во время их исправной работы даже дистанционно, не ожидая глобального их отказа.
Это характерно, например, для современных ЭВМ и их базовых программных средств, в частности операционных систем, причем, чем мощнее комплекс, тем более развиты в нем средства обеспечения отказобезопасности (см., например, краткое описание свойств операционной системы MVS/390 мейнфреймов серии ES/9000 фирмы IBM).
В условиях рассматриваемой задачи общей оценки надежности человеко-машинных систем все эти средства формируют величину pT(t1, del t).
Кроме указанных возможностей, заложенных в технологической части системы, определенные возможности и функции оператора могут использоваться не только при управлении системой, но также и в сфере устранения ошибок или отказов технологической части системы. По-видимому, в ряде ситуаций, заметив отклонения в работе каких-либо технологических комплексов, человек-оператор может определить причины возникновения этих отклонений и подать, управляющие воздействия в целях компенсации нештатных явлений или просто устранить возникший отказ. Так, обнаружив, что какая-то часть технологического комплекса системы начинает проявлять тенденцию к выходу из нормального режима работы, оператор может вывести ее из состава системы, ввести замену из резерва и таким образом сохранить работоспособность системы в целом. Однако очевидно, что оператор может компенсировать только некоторые неисправности и при условии, что он их заметил, идентифицировал и в состоянии компенсировать.
С позиций оператора отказ проявляется в системе в виде выхода на недопустимое значение некоторого контролируемого параметра, который может быть векторным, комплексным или составным; изменение его во времени будет случайным процессом η(r), свойства которого и определяют алгоритмы компенсации оператором последствий отказа. Вмешательство оператора в целях компенсации проявления отказа можно представить тоже в виде некоторого случайного процесса ηK(r). Если для обработки ситуации н выявления отказа оператору требуется время rK, то изменение параметра после вмешательства оператора будет описываться случайным процессом
del η(r) =ηt(r) – ηT(r – rk).
Для каждой системы ее исправное состояние соответствует пребыванию отклонения определяющего параметра del η(r) в заданной области D, т.е.
del η(r) Є D. (6-7)
Поскольку значение rк в каждой ситуации зависит от варианта комбинации состояний элементов и свойств оператора в части определения отказа, оно является случайным и может быть, в частности, недопустимо большим при эксплуатации системы. В связи с этим оператор в состоянии компенсировать только некоторые отказы в приемлемое время.
Описать приращение вероятности безотказной работы технологической части системы можно в виде условной вероятности py(t1, del t, δ) безотказной работы этой части системы в течение интервала (t1, t1 + del t), определяемой при условии, что в некоторый момент δ, где t1 < δ < t1 + del t, в ней произошел отказ, который обнаружен, идентифицирован и компенсирован оператором.
Тогда для расчета вероятности безотказной работы системы в таких условиях p3(t1, del t) можно использовать следующую формулу:
p3(t1, del t) = p0(del t){pт(t1, del t) + py(t1, del t, δ)} (6.8)
где сохранены и все ранее введенные обозначения.
Как видно из сопоставления выражений (6.5) и (6. 8), обычно p3(t1, del t) > p1(t1, del t), хотя возможно p3(t1, del t) àp1(t1, del t), когда py(t1, del t, δ) à0, что бывает при снижении возможностей оператора по всем их составляющим (выявление, идентификация, устранение) при компенсации отказов технологической части ИС.
Четвертый вариант - система с коррекцией ошибок оператора и компенсацией отказов технологической части. Для определения вероятности ее безотказной работы в таких условиях p4(t1, del t) на интервале (t1, t1+del t) в выражении (6.8), которое может рассматриваться как базовое, в качестве сомножителей р0(del t) и рт(t1, del t) следует использовать расширенные выражения для них из формул (6.6) и (6.8) соответственно. Тогда можно записать следующее выражение:
p4(t1, del t) = {р0(del t) + (1 - р0(del t)p}(pт(t1, del t) + py(t1, del t, δ)) (6.9)
где сохранены все обозначения. С учетом соотношений (6.5), (6.6) и (6.8) выражение (6.9) можно представить в виде следующего равенства:
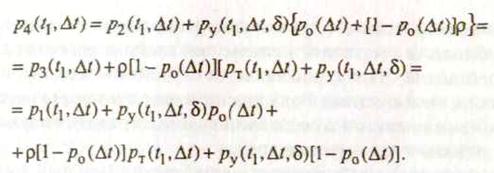
Здесь можно отметить, что в приведенных выражениях члены p0(del t) и pT(t1, del t) отражают характеристики надежности основных элементов системы и являются базовыми: на них строятся оценки достигнутого уровня надежности и соответственно - качества системы. Поэтому именно они характеризуют основной порядок значений вероятности и должны быть как можно ближе к единице. Величины р и py(t1, del t, δ) характеризуют факторы, которые позволяют повысить надежность за счет использования специфических свойств оператора как элемента системы в части его активного воздействия на технологические элементы комплекса человеко-машинной системы. Представленные и аналогичные модели могут обеспечить повышение качества управления в текущих условиях и сформировать стратегические концепции для ИС по ее основным показателям.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1025; Нарушение авторских прав?; Мы поможем в написании вашей работы!