КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Метод аналитического конструирования регуляторов
|
|
|
|
Этот метод позволяет синтезировать многомерный регулятор, учитывающий в своей структуре взаимосвязь переменных в объекте управления. Синтез ведется с помощью методов теории оптимального или модального управления при описании объекта в пространстве состояний / 6 /.
Структурная схема оптимального регулятора состояния, содержащего наблюдающее устройство приведена на рис. 2.15. Схема содержит следующие элементы: Н - наблюдатель; ОУ - объект управления; МОУ - модель объекта управления; ОРС - оптимальный регулятор состояния, ЕН - ошибка наблюдения, XМ - вектор состояния модели, XЗ - вектор задания, U - вектор входа ОУ, Y - вектор выхода ОУ, YМ - вектор выхода модели.
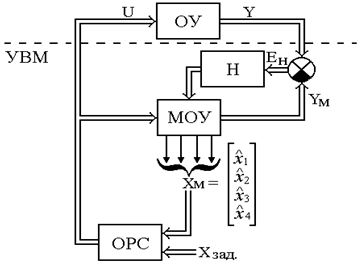
Рис. 2.15. Структурная схема оптимального регулятора состояния


Оптимальный регулятор состояния, являясь наиболее совершенным типом регулятора, требует измерения всех компонент вектора состояния объекта. Для получения их оценок ( ) используется динамическая модель объекта (цифровая или аналоговая), подключенная параллельно исходному ОУ. Для обеспечения равенства движений в реальном объекте и модели используется наблюдатель, который, сравнивая движения векторов Y и YМ, обеспечивает их равенство (
) используется динамическая модель объекта (цифровая или аналоговая), подключенная параллельно исходному ОУ. Для обеспечения равенства движений в реальном объекте и модели используется наблюдатель, который, сравнивая движения векторов Y и YМ, обеспечивает их равенство ( ). Параметры регулятора состояния рассчитываются методами аналитического конструирования регуляторов путем минимизации интегрального квадратичного критерия качества
). Параметры регулятора состояния рассчитываются методами аналитического конструирования регуляторов путем минимизации интегрального квадратичного критерия качества
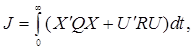
где Q и R - матрицы штрафов (весов) на компоненты вектора состояния и вектора управления.
Реализация оптимального регулятора состояния чаще всего производится на управляющей вычислительной машине (УВМ).
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 791; Нарушение авторских прав?; Мы поможем в написании вашей работы!