КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Электоронный тахеометр Та3
|
|
|
|
Электронный тахеометр Та3 «Агат» (рис. 1,2) является многофункциональным геодезическим прибором, состоящим из электронного теодолита, светодальномера и микроЭВМ. Им можно определять:
зенитные расстояния Z,
горизонтальные (дирекционные) углы b (А),
наклонные расстояния Д,
среднее значение наклонного расстояния Дср,
дисперсию расстояния  ,
,
превышения или высоты точек визирования h (H),
горизонтальные проложения линий Д0,
приращения координат и координаты точек визирования DХ, DУ, Х, У.
Решение задач производится по следующим программам:
полная – последовательное (раздельное) измерение z, b, Д и определение Д0, Н, Х, У;
полуавтоматическая – последовательное (раздельное) измерение z, b и Д, автоматическое определение Д0, Н, Х, У;
сокращенная – автоматическое измерение b и определение Д0, Н, Х, У;
слежение – измерение Д, z, b, Д0, Н, Х, У по перемещаемому отражателю.
Обработка и выдача информации угловых значений производится в градусах или по заказу потребителя в гонах.
Оперативная информация и содержимое памяти индицируются на цофровом табло и могут быть выданы в накопитель (регистратор) информации.
Микро-ЭВМ автоматически учитывает поправки за кривизну Земли и рефракцию атмосферы (К=0,13).
Микро-ЭВМ обрабатывает и учитывает следующие вводимые величины:
Кп – поправочный коэффициент на изменение температуры и давления;
Кf – коэффициент, учитывающий температурное изменение масштабной частоты кварцевого генератора;
 – разность высот штативов тахеометра и отражателя;
– разность высот штативов тахеометра и отражателя;
Но – высоту точки стояния прибора;
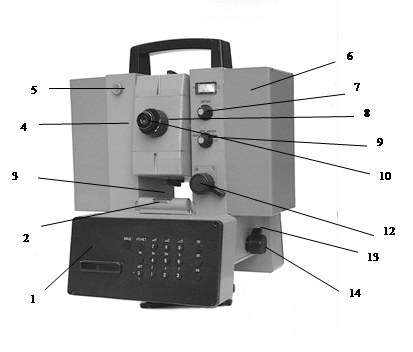
Рис.1. 1 – панель управления; 2 – уровень цилиндрический; 3 – уровень круглый;
4 – колонка; 5 – прижим; 6 – крышка; 7 – регулятор уровня сигнала; 8 – маховичок;
9 – переключатель; 10 – диоптрийное кольцо; 11,13 – курковые зажимы;
12,14 – наводящие винты
Ао – начальный дирекционный угол;
Хо, Уо – координаты точки стояния прибора;
Км – число целых километров измеряемой линии.
Микро-ЭВМ имеет программы контроля работы прибора.
Тахеометр снабжен электрооборудованием для работы ночью.
Тахеометром можно измерять расстояния от 2 до 5000 м со средней квадратической ошибкой 10 мм + 5 мм/км. Горизонтальные углы и зенитные расстояния измеряются с точностью 4² и 6².
В комплект тахеометра входят два малых и два больших отражателя, две вехи, два источника питания напряжением 6,5¸8,5. В разряднозарядное устройство, подставки, штативы и другие принадлежности общей массой 66 кг.
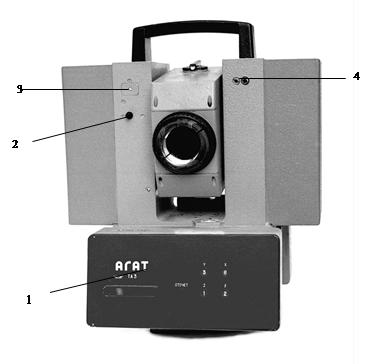 |
Рис.2. Та3. 1 – панель; 2 – рукоятка установки контрольного отсчета;
3 – крышка; 4 – розетка для подключения фонарей подсветки органов управления
Для измерения расстояний тахеометром Та3 используется устройство аналогичное светодальномеру СТ5. Для измерения углов применен растровый датчик накопительного типа. В качестве датчика угла применен фотоэлектрический преобразователь угол-код. Рабочей мерой преобразователя служит лимб. Участок лимба (~100 штрихов) проецируется оптическим мостиком с увеличением 1,01 на диаметрально противоположный участок лимба, что создает муаровую картину, проецируемую на фотоприемник. Сигнал с фотоприемника поступает в электронную часть датчика угла, состоящую из каналов грубого и точного отсчетов.
Канал грубого отсчета содержит реверсивный счетчик, подсчитывающий количество муаровых полос, соответствующее углу поворота зрительной трубы или алидады горизонтального круга.
В канале точного отсчета угла применен фазовый интерполятор, измеряющий угол поворота лимба в пределах дискрета грубого отсчета. Сформированный код измеряемого угла поступает в микро–ЭВМ.
Для исключения погрешностей при измерении углов, связанных с разюстировкой оптического мостика, с колебаниями температуры, а также с разбросом характеристик электрорадиоэлементов и их изменением во времени, в сигнальных каналах датчиков углов введены схемы автоподстройки.
Для повышения надежности работы прибор в условиях небольших вибраций микро-ЭВМ тахеометра обрабатывает информацию о зенитных расстояниях с учетом колебаний маятника.
Микро-ЭВМ выполняет функции управления и обработки информации, поступающей с дальномера, датчиков и панелей, а также обеспечивает решение различных геодезических задач.
Конструктивно тахеометр состоит из трех основных частей: колонки, системы вертикальной оси и корпуса зрительной трубы. Корпус зрительной трубы с помощью полуосей установлен в эксцентриковых лагерях колонки 4 (рис.1).
На одной полуоси укреплен кодовый круг датчика вертикальных углов, на другой – втулка с хомутиком, входящим в систему наводящего устройства зрительной трубы.
Вертикальная ось жестко скреплена с колонкой, опирается на шариковый подшипник и вращается внутри баксы на которой закреплен датчик горизонтальных углов. Бакса скреплена с втулкой – хвостиком, при помощи которой тахеометр устанавливается в подставке.
В корпусе зрительной трубы расположены визирная и приемно-передающая оптические системы.
Переключатель подготовки прибора к работе имеет 5 положений:
ВЫКЛ – на стрелочный прибор подается напряжение холостого хода аккумулятора;
ВКЛ – подается питание на электронные узлы;
ИЗМЕР – обеспечивает ввод исходных данных и проведение измерений;
VАК – на стрелочный прибор подается напряжение аккумулятора под нагрузкой;
СЛ – обеспечивает режим слежения.
Розетка 4 (рис. 2) предназначена для подключения фонарей подсветки органов управления в темное время суток. Под крышкой 3 установлены гнезда  для подключения частотомера и резистор R подстройки частоты задающего генератора. Рукоятка 2 предназначена для регулирования значения контрольного отсчета дальномера.
для подключения частотомера и резистор R подстройки частоты задающего генератора. Рукоятка 2 предназначена для регулирования значения контрольного отсчета дальномера.
На панели управления размещены кнопки и цифровые табло, назначение которых приведено в таблице 2.
Работа с тахеометром выполняется в следующем порядке. Над точкой устанавливается штатив с подставкой, которая центрируется с помощью центрира ЦО-30. Затем в подставке закрепляется тахеометр и устанавливается по уровню. Подключается источник питания. На другом конце линии устанавливается и центрируется отражатель. При необходимости измеряются рулеткой высоты тахеометра и отражателя над точками стояния.
Для выполнения измерений переключатель 9 переводится в положение ИЗМЕР. При этом на табло индицируются буквы ПР, выполняется программа самоконтроля, загораются цифры 8 во всех 10 разрядах и через 4с появляется буква П.
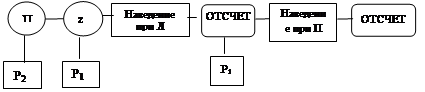
При измерениях необходимо соблюдать порядок работы по схемам, приведенным ниже. Схемы показывают последовательность действий оператора (нажатие кнопок, наведение зрительной трубы при положении прибора Л или П, набор исходных данных и др.). Во втором ряду схем указана информация, индицируемая на цифровом табло (реакция прибора на действие оператора). Условные обозначения кнопок (операций) в схемах:
– допускается многократное нажатие кнопки, при этом информация на табло повторяется, а при измерениях (перенаведениях) уточняется;
– если кнопка ОТСЧЕТ нажимается в первый раз после включения прибора, то ее необходимо нажать дважды. Первое нажатие кнопки ОТСЧЕТ рекомендуется проводить
– Первое нажатие кнопки ОТСЧЕТ рекомендуется проводить до наведения зрительной трубы на визирную цель при зенитных расстояниях не более 60...1200;
– кнопки поочередного включения.
После каждого третьего нажатия информация повторяется;
– кнопки одноразового нажатия.
Повторное нажатие кнопки измеряет работу прибора, при этом меняется информация на табло.
Т а б л и ц а 2. Назначение органов управления
| Код операции (обозначение кнопки на панели | Цифровой код (индикация на табло) | Выполняемая программа | |
| Режим | |||
| Р | П | ||
| z I | I | z – измерение зенитного расстояния | zp – ввод зенитного расстояния |
| b | b(А) – измерение горизонтального (дирекционного)угла | bр – ввод горизонтального угла | |
| У | У – определение координаты точки визирования, мм | У0 – ввод координаты точки стояния, мм | |
| Кп | Дср,  – определение среднего значения наклонного расстояния и дисперсии значений Д – определение среднего значения наклонного расстояния и дисперсии значений Д
| КП – ввод коэффициента на изменение температуры и давления воздуха | |
| КМ | КМ – ввод числа целых километров | ||
| Х | Х – определение координаты точки визирования, мм | Хо – ввод координат точки стояния, мм | |
7
| Д – измерение наклонной дальности | ДР – ввод наклонной дальности | |
| ДО – определение горизонтального проложения | АО – ввод дирекционного угла | ||
| h (H) – определение превышения (высоты) точки визирования | DН – ввод разности высот тахеометра и отражателя | ||
| АВТ О Т | Измерение (А) и определение ДО, Н,Х,У | 1.ТК – контроль температуры кварца 2. «__» – ввод знака числа |
Приведенные ниже схемы рекомендуется изготовить на плотной бумаге и во время работы закреплять на приборе прижимом.
При измерении зенитных расстояний сначала определяют так называемое опорное направление a путем визирования на одну и ту же цель при двух положениях вертикального круга, а затем измеряют зенитные расстояния z i на другие точки при любом положении круга. При определении опорного направления обеспечивается привязка и фиксация в памяти микро-ЭВМ положения зрительной трубы относительно самоустанавливающегося индекса вертикального круга.
Повторное измерение опорного направления может быть проведено после нажатия кнопки NО и z или после отключения питания
Определение опорного направления z
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1755; Нарушение авторских прав?; Мы поможем в написании вашей работы!