КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Конспект лекций по дисциплине
|
|
|
|
«Система сбора и обработки информации
о технологических потоках и оборудовании»
Лекция№1
1 ЭВМ в системах управления технологическими процессами
1.1 Структурная модель технологического процесса
Технологическим процессом называется последовательная смена во времени состояний производственного оборудования, материальных и энергетических потоках и способов обработки исходного сырья, направленных на изготовление готовой продукции.
Технологический процесс характеризуется множеством взаимодействующих между собой параметров процесса.
Технологические параметры можно разделить на два основных типа:
- входные;
- выходные
Входные технологические параметры подразделяются на:
-управляемые (регулируемые) технологические параметры;
-неуправляемые;
-фиксированные параметры, задаваемые конфигурацией технологической
схемы или отдельного оборудования, их изменения возможны лишь
при завершении определенной технологической стадии.
Выходные технологические параметры подразделяются: на
- измеряемые выходные параметры;
- параметры оценки качества получаемой продукции
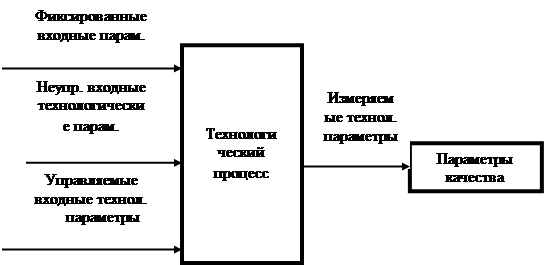
Схема структурной модели технологического процесса изображена на рисунке 1.
 |
Задача управлени
Рис.1 Схема структурной модели технологического процесса.
Задача управления технологическим процессом заключается в варьировании его измеряемыми выходными параметрами таким образом, чтобы достигнуть желаемого значения параметра, оценивающего качество получаемой продукции. Это достигается путем изменения управляемых входных параметров процесса.
В настоящее время для управления технологическими процессами разрабатываются автоматизированные системы с использованием микропроцессорной техники как на нижнем уровне управления (сбор информации от первичных преобразователей, обработка этой информации и передача ее на верхний уровень управления), так и на верхнем уровне (выработка решений по оптимизации процесса, решение задач диагностики состояний технологического процесса и оборудования, предупреждения аварийных ситуаций).
1.2 Основные понятия о системах автоматического регулирования.
Автоматизация – замена физического (умственного труда) труда человека автоматическими устройствами. При автоматизации практически любого производства можно выделить несколько уровней.
Локальные системы автоматизации.
Автоматизации подлежат отдельные технологические объекты. На этом этапе решаются задачи регулирования отдельных технологических параметров, например, давления, температуры, расхода и так далее.
Автоматизированные системы управления технологическими процессами.
(АСУТП)
На этом уровне разрабатываются системы управления совокупностью технологических объектов, например, цехом, и решаются задачи управления и оптимизации технологических процессов.
Автоматизированные системы управления предприятием.
На основании информации о работе отдельных цехов осуществляется решение технико-экономических задач.
Второй и третий уровень предусматривает решение задач сбора достоверной информации о параметрах, определяющих протекание технологического процесса; анализ результатов измеряемых технологических параметров и определение характера и величины управляющего воздействия; внесение управляющих воздействий посредством изменения величины каких-либо материальных или энергетических потоков.
Система автоматического регулирования (САР) – это динамическая система, состоящая из технологического объекта управления и взаимодействующей с ним автоматического регулятора, которые охвачены единым алгоритмом управления.
|

|
|
|
|

Рис.2 Схема системы автоматического регулирования.
z – возмущающие воздействия, вызывающие отклонения режима работы объекта управления от заданного.
Возмущающие воздействия подразделяются на внешние и внутренние. Внешние возмущающие воздействия формируются вне объекта, например, изменение скорости подачи сырья, изменение давления входных газовых потоков, изменение температуры окружающей среды и так далее. Внутренние возмущающие воздействия формируются внутри самого объекта, например, отложение солей на поверхности трубопроводов, изменение активности катализатора и так далее.
1.3 Классификация САР по назначению.
САР подразделяются на стабилизирующие, программные, следящие, оптимального управления и адаптивные.
Стабилизирующие САР – это системы регулирования, предназначенные для поддержания регулируемой величины на заданном значении.
Программные САР – это системы, в которых значение регулируемой величины изменяется во времени по заранее заданной программе.
Следящие САР – это системы, в которых осуществляется изменение величины одного параметра (входного) в зависимости от изменения другого параметра (ведущего), причем изменение ведущего параметра заранее предсказать нельзя. Примером является регулирование соотношения расходов.
Системы оптимального управления – это системы, в которых значение регулируемой величины поддерживается на некотором оптимальном значении. Такие системы удается реализовать в том случае, если зависимости между выходными и входными координатами имеют экстремальный характер. Параметры, относительно которых проводится оптимизация, называются критериями оптимизации. В качестве критерия оптимизации могут быть как технологические параметры, так и ряд технико-экономических показателей, например, себестоимость продукции, уровень рентабельности и так далее.
Адаптивные системы – это САР, в которых в зависимости от изменений условий работы объекта и его свойств происходит изменение параметров регулирующих устройств или структуры системы управления. Если в результате адаптации изменяются параметры регулирующего устройства, система называется самонастраивающейся. Если в результате адаптации изменяется структура системы управления, то она называется самоорганизующейся.
Механизм адаптации реализуется с помощью трех функций, характерных для адаптивного управления:
- функции идентификации:
- функции принятия решений;
- функции настройки
Функция идентификации служит для определения текущего значения показателя качества работы системы, в частности вычисления показателя качества на основании измерения параметров технологического процесса и/или сравнения мгновенного показателя качества с некоторыми оптимальными показателями.
С помощью функции принятия решений делается вывод, как настроить механизм управления, чтобы повысить качество получаемой продукции
Процедура принятия решений реализуется с помощью заранее заданной программ логического управления (изменение одного или нескольких управляемых входов процесса).
Функция настройки адаптивного управления заключается в реализации принятого решения. В то время как функция принятия решения является логической функцией, функция настройки связана с физической или механической перестройкой системы управления.
Схема системы адаптивного управления показана на рисунке 3.
 | |||
 | |||
Рис. 3. Общая архитектура системы адаптивного управления.
Лекция №2
1.4. Классификация систем по принципу управления.
САР подразделяются по способу формирования управляющего воздействия:
- системы регулирования по отклонению;
- системы регулирования по возмущению:
- комбинированные системы управления
САР по отклонению называются замкнутыми. Управляющее воздействие формируется с учетом отклонения регулируемой величины от заданной.
y = f(xвых..- xвх.)
Схема САР по отклонению изображена на рисунке 4.
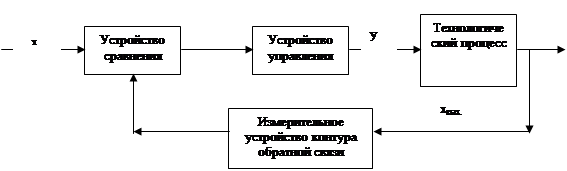 |
Рисунок 4. Схема САР по отклонению.
В САР по возмущению управляющее воздействие формируется с учетом возмущающих воздействий (z) на протекание процесса.
Схема САР по возмущению изображена на рисунке 5.
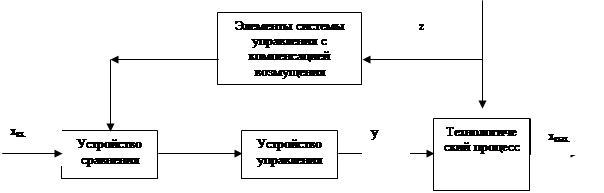 |
Рисунок 5. Схема САР по возмущению.
В комбинированных системах управления управляющее воздействие формируется с учетом двух выше перечисленных принципов.
1.5 Архитектура систем управления технологическими процессами
Системы управления технологическими процессами подразделяются на следующие:
распределенные и централизованные системы управления;
- системы прямого цифрового управления;
- диспетчерские системы управления.
В свою очередь распределенные и централизованные системы управления подразделяются на следующие:
- централизованные системы управления;
- частично распределенные системы управления;
- полностью распределенные системы управления.
Централизованные системы управления наиболее распространенная архитектура систем управления в настоящее время. Она состоит из центра управления и расположенных в производственных помещениях датчиков и исполнительных механизмов. Информационные и управляющие сигналы могут передаваться в аналоговом и цифровом виде, при этом возможно преобразование аналоговых сигналов к цифровому виду, а также обратное преобразование.
Архитектура централизованной системы управления представлена на рисунке 6.
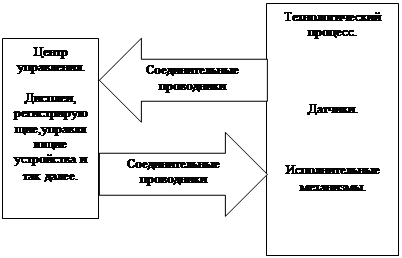 |
Рисунок 6. Архитектура централизованной системы управдения.
Подобную архитектуру целесообразно использовать при небольшой протяженности линий связи между местом установки ЭВМ и технологическим процессом.
В современных АСУТП ЭВМ выполняют многочисленные функции:
- информационно-вычислительные;
- управления;
- диагностики состояния технологического процесса и оборудования;
- противоаварийной защиты.
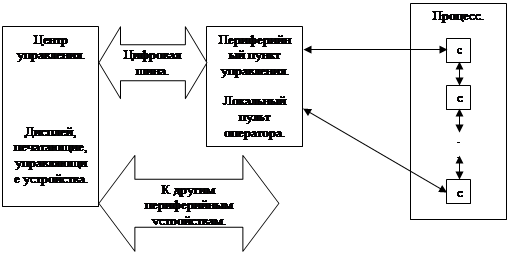
В частично распределенных системах управления предусматриваются дополнительные периферийные блоки управления, расположенные вблизи соответствующих технологических участков. Связь между ними и центром управления осуществляется по шине цифровых данных, позволяющей передавать информацию в обоих направлениях. В свою очередь сигналы от датчиков и исполнительных механизмов передаются к периферийному блоку управления, расположенному в том же производственном помещении. Таким образом, физическая протяженность контуров управления значительно сокращается, вследствие чего возрастает надежность, помехо- и отказоустойчивость. В случае, если связь с центром управления нарушается, управление процессом осуществляется периферийном блоком управления.
Схема архитектуры частично распределенной системы представлена на рисунке 7.
 |
Рисунок 7. Архитектура частично распределенной системы управления.
Полностью распределенные системы управления в сочетании с возможностями современных ЭВМ дает преимущества, которые невозможно было реализовать в существовавших ранее системах управления. Система управления включает ряд периферийных блоков управления, соединенных с центром управления с помощью индивидуальных локальных управляющих устройств, связанных с соответствующими датчиками и исполнительными механизмами. Связь между этими управляющими устройствами и периферийными блоками управления осуществляется с помощью цифровой шины данных с кольцевой конфигурацией. Такая конфигурация является основой повышенной надежности полностью распределенной системы управления. При повреждении шины в любой точке связь между блоком управления и его управляющими устройствами по-прежнему осуществляется через оставшуюся часть кольца.
Полностью распределенная система управления имеет преимущество перед частично распределенной, заключающейся в минимальной физической протяженности контуров управления.В настоящее время наметилась тенденция встраивать микропроцессоры непосредственно в локальные управляющие устройства. Это позволяет реализовать в каждом контуре управления сложные управляющие функции и придать ему некоторые «интеллектуальные» способности.
Схема архитектуры полностью распределенной системы управления
представлена на рисунке 8.
 |
|
Рисунок 8. Архитектура полностью распределенной системы управления.
В системах прямого цифрового управления ЭВМ заменяет традиционные аналоговые управляющие устройства (аналоговые регуляторы).
Любой замкнутый аналоговый контур управления имеет следующие элементы:
- преобразователи и датчики, которые устанавливаются непосредственно на технологическом оборудовании;
- исполнительные механизмы (клапаны, реле и так далее);
- аналоговые устройства управления электрическими или пневматическими устройствами, блоки сравнения являются частью аналоговых устройств;
- приборы регистрации и индикации.
Датчики, преобразователи и исполнительные механизмы являются принадлежностью и систем прямого цифрового управления. Место остальных элементов занимает ЭВМ. Дискретный сигнал от ЭВМ поступает непосредственно на исполнительный механизм.
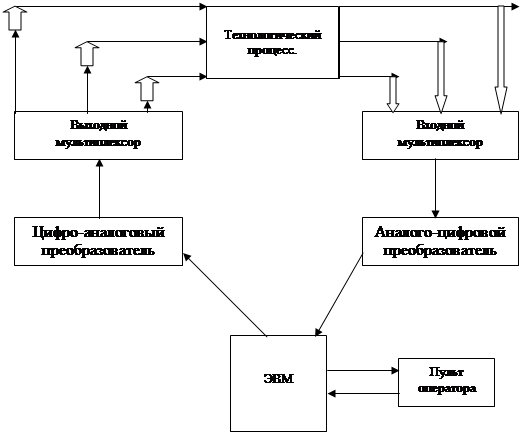
Схема архитектуры системы прямого цифрового управления показана на рисунке 9.
|
| ||||||
 | |||||||
 |
- исполнительные механизмы;
 |
- датчики, преобразователи
Рис.9. Архитектура системы прямого цифрового управления.
Мультиплексоры служат для выборки значений сигналов
Главной задачей диспетчерских систем управления является нахождение оптимальных значений настраиваемых параметров для каждого контура управления с целью решения определенной задачи оптимизации согласно математической модели управляемого технологического процесса. В диспетчерских системах управления могут присутствовать все ранее рассмотренные системы управления, а в отдельных контурах могут использоваться как аналоговое, так и прямое цифровое управление. В таких системах кроме настройки заданных параметров в контурах управления ЭВМ может управлять отдельными дискретными параметрами процесса – включение и выключение электродвигателей, открытие, закрытие отсечных клапанов и так далее, то есть осуществлять логическое управление отдельными стадиями технологического процесса. Большая часть технологических операций характеризуется комбинацией аналоговых и дискретных сигналов, следовательно, ЭВМ, реализующая диспетчерское управление, должна сочетать логическое управление и настройку параметров САР.
Схема архитектуры системы диспетчерского управления показана на рисунке 10.
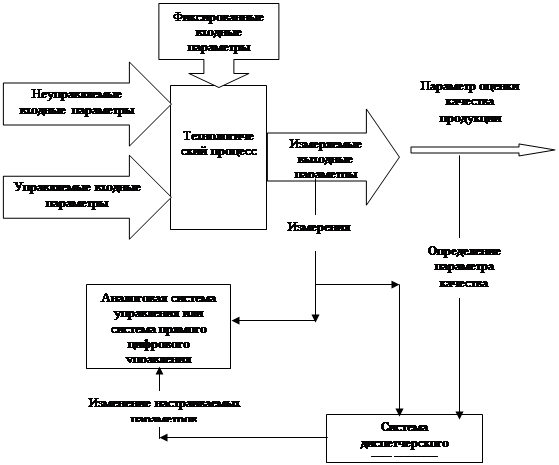 |
Рисунок 10. Архитектура системы диспетчерского управления.
Лекция№3
2. Связь ЭВМ с технологическим процессом.
2.1. Информация о технологическом процессе.
Основные функции ЭВМ в составе АСУ следующие:
- получение информации об основных параметрах технологического процесса;
- воздействие на технологический процесс с целью управления им.
Информационные сигналы от технологического процесса подразделяются на следующие:
- непрерывные аналоговые;
- дискретные двоичные;
- импульсные
Примером аналогового сигнала служат технологические параметры. Непрерывный аналоговый сигнал можно представить в виде непрерывно меняющейся во времени переменной величины, ограниченной конечным диапазоном допустимых значений.
Дискретные двоичные сигналы могут принимать одно из двух значений «включено» - «выключено» или «открыто» - «закрыто». Клапаны, двигатели, переключатели – устройства, состояние которых в любой момент времени можно определить двоичной переменной. Двоичные сигналы в электронных цифровых устройствах обычно представляются в виде двух уровней напряжений. Типовым уровнем напряжения является 0 и 1 или 5В.
Импульсные сигналы представляют собой последовательность электрических импульсов, формируемых генератором. Такую последовательность импульсов можно использовать для управления устройствами типа шаговых двигателей. Шаговый двигатель – это импульсный электродвигатель, в котором импульсы тока, подаваемые в обмотки возбуждения статора. Преобразуются в дискретные угловые перемещения (шаги ротора). Длительность отдельного импульса есть величина постоянная.
Три способа представления информации показаны на рисунке 2.1.
2.2. Представление данных о технологическом процессе в памяти ЭВМ.
Существуют три основных формы организации данных о состоянии технологического процесса в памяти ЭВМ:
- в виде элементарных триад;
- позиционная;
- анкетная
Основу языка элементарных триад составляет выражение вида x,y,z, где x - обозначение некоторого объекта;
у - основные характеристики этого объекта;
z - значения характеристик y.
Пример табличной организации данных для каскада реакторов.
| x | y1 | y2 | … | yn |
| x1 | z11 | z13 | y1n | |
| x2 | z21 | z23 | y2n | |
| … | … | … | ||
| xm | zm1 | zm3 | zmn |
Таким образом, каждая строка такой таблицы содержит сведения о характеристиках одного технологического объекта. Если в подобной таблице иметь четко фиксированные графы rак по их количеству, так и по расположению их информации, то смысл содержимого полей записи можно различить по их расположению в таблице. Такая форма организации называется позиционной структурой. Или, если количество столбцов (граф) и порядок их следования не зафиксирован, тогда смысл содержимого полей записи различают по их идентификаторам (анкетная структура).
2.3 Организация сопряжения ЭВМ с управляемым технологическим объектом.
При наличии трех рассматриваемых сигналов существует шесть сочетаний входов и выходов, которые могут иметь место при организации сопряжения ЭВМ с технологическим процессом:
- сопряжение аналогового выхода с цифровым входом;
- контактное сопряжение на входе;
- вход в виде счетчика импульсов;
- сопряжение цифрового выхода с аналоговым входом;
- контактное сопряжение на выходе;
- выход в виде генератора импульсов.
Сопряжение аналогового выхода с цифровым входом предполагает преобразование поступающих от технологического процесса аналоговых сигналов в цифровое представление. Выполняется это преобразование с помощью следующих устройств:
- Преобразователи, превращающие измеренный параметр технологического процесса в уровни напряжения, величина которых пропорциональна этому измеренному значению. Примером служит термопара, преобразующая температуру в электрический сигнал с низким уровнем напряжения;
- Формирователи сигналов, которые фильтруют электрические помехи и сглаживают аналоговые сигналы, полученные от измерительных преобразователей.
- Мультиплексоры, которые служат для сопряжения нескольких преобразователей и связанных с ними устройств с АЦП. Они периодически осуществляют выборку значений сигналов и передают их на вход АЦП;
- Усилители, преобразующие выходной сигнал к уровню, необходимому для ввода в ЭВМ;
- АЦП, которые преобразуют действительные значения входных сигналов в эквивалентные им цифровые сигналы;
- Устройство ввода- вывода ЭВМ, принимающего от АЦП цифровой сигнал.
Входное контактное устройство сопряжения представляет собой простой набор контактов, которые могут быть замкнуты или разомкнуты в зависимости от состояния конечных выключателей и других информационных двоичных сигналов. ЭВМ периодически проверяет состояние объектов и сравнивает его со значениями, заданными программой.
Счетчик импульсов преобразует серию импульсов в цифровое представление.
Цифро-аналоговый преобразователь цифровые сигналы от ЭВМ и преобразует их псевдоаналоговый сигнал (ЭВМ не способна генерировать бесконечное число уровней аналогового сигнала).
Выходное контактное устройство также представляет собой набор контактов, которые могут быть замкнуты или разомкнуты. Оно служит для управления технологическим оборудованием(включение двигателей насосов, мешалок, открытием, закрытием отсечных клапанов), включением сигнальных устройств.
Генераторы импульсов служат для преобразования цифровых сигналов от ЭВМ в серию импульсов, применяемых для управления таким исполнительным механизмом как шаговый двигатель.
2.4 Аппаратные устройства сопряжения
К аппаратным устройствам сопряжения относятся следующие:
- первичные преобразователи и датчики (в случае непосредственного изменения физической величины):
- АЦП;
- ЦАП;
- мультиплексоры
Преобразователи подразделяются на два вида: аналоговые и цифровые. Аналоговые преобразователи генерируют непрерывный сигнал, например, в виде напряжения или электрического тока. Для установления соответствия между измеряемым технологическим параметром и непрерывным аналоговым сигналом выполняется калибровка. Генерируемые аналоговыми преобразователями сигналы подразделяются на сигналы низкого уровня (милливольты) и сигналы высокого уровня (больше 1 вольта).В настоящее время все большее применение находят цифровые преобразователи, которые используются в качестве автономных контрольно-измерительных приборов. Цифровые преобразователи генерируют дискретный двоичный сигнал в виде комбинации параллельных двоичных разрядов или серию счетных импульсов, представляющих на выходе преобразователя измеряемую величину.
Аналого-цифровые преобразователи преобразуют сигналы в три этапа:
- в результате периодической выборки непрерывный аналоговый сигнал преобразуется в серию дискретных сигналов;
- величина каждого из дискретных сигналов соотносится с одним из конечного числа заранее определенных уровней квантования, на которые разделен диапазон значений напряжения соответствующего устройства;
- полученные уровни квантования преобразуются к дискретному виду.
- Структурная схема АЦП представлена на рис. 11

|



 | |||||
 | |||||
 |
Рисунок 11 Структурная схема АЦП.
Пример.
АЦП преобразует аналоговый сигнал напряжения 0-3 в четырехразрядное слово в соответствии с заданной таблицей истинности.
Таблица 2
| Аналоговый вход | Двоичный выход | |||
| Вольты | D | C | B | A |
| 0.2 | ||||
| 0.4 | ||||
| 0.6 | ||||
| 0.8 | ||||
| 1.0 | ||||
| 1.2 | ||||
| 1.6 | ||||
| 1.8 | ||||
| 2.0 | ||||
| 2.2 | ||||
| 2.4 | ||||
| 2.6 | ||||
| 2.8 | ||||
| 3.0 |
Рабочие характеристики АЦП следующие:
- частота выборки;
- время преобразования;
- разрешающая способность.
Чем выше частота выборки, то есть частота замера аналогового сигнала, тем точнее будет выполнение аппроксимации сигнала. Верхний предел частоты выборки ограничен временем выполнения аналогово-цифрового преобразования
Время преобразования - это время, в течение которого входной аналоговый сигнал должен быть преобразован в цифровой сигнал.
Разрешающая способность аналого-цифрового преобразователя ограничивается точностью, с которой аналоговый сигнал можно представить в цифровом виде. Точность определяет числом уровней квантования, которые в свою очередь зависят от числа двоичных разрядов, используемых в данном АЦП.
Число возможных уровней квантования равно 2N
где N - число двоичных разрядов.
Разрешающая способность преобразователя будет обратно пропорциональна числу уровней квантования, а интервал между соседними уровнями квантования будет равен частному от деления предельного значения входного аналогового сигнала на число уровней квантования.
Цифро-аналоговый преобразователь осуществляет преобразование в два этапа:
- цифровые сигналы преобразуются в их аналоговый эквивалент (кодирование);
- преобразование дискретных сигналов в непрерывный аналоговый сигнал.
Лекция 5.
2.5 Типовая задача цифровой обработки сигналов.
Объектом управления является некоторая технологическая линия, на вход которой подается сырье, на выходе - готовая продукция. На рисунке показан один из возможных датчиков, который регистрирует и преобразует в аналоговый сигнал один из возможных технологических параметров.
Электрический аналоговый сигнал подается на вход АЦП для своего преобразования. Однако регистрация измеряемого технологического параметра в виде физической величины, ее преобразование в аналоговый сигнал, дальнейшее преобразование в цифровой сигнал сопровождается целым спектром помех, искажающих восприятие полезного сигнала, несущего информацию о состоянии контролируемого параметра, поэтому возникает первая типовая задача цифровой обработки сигнала - цифровая фильтрация сигнала. Цифровая фильтрация сигналов сводится к обработке полученной от ЭВМ последовательности выборок входной информации таким образом, что отфильтрованная цифровая последовательность будет обладать желаемыми свойствами, например, низкочастотный фильтр не пропустит высокочастотного шума. Отфильтрованный от помех сигнал обрабатывается алгоритмом цифрового регулирования (цифровой регулятор).
Целью подобной обработки является выработка управляющего воздействия на исполнительный механизм на основании информации о состоянии в настоящий момент измеряемого технологического параметра.
Вторая типовая задача цифровой обработки сигнала является цифровое регулирование технологического параметра.
Необходимо отметить, что обе названные задачи важны в равной степени.
В случае необходимости полученный цифровой сигнал преобразуется в аналоговый.
Следует обратить внимание на различие между аналоговым и цифровым регулированием. У цифровых регуляторов от момента получения ими информации о состоянии входных величин до момента выдачи управляющей команды проходит определенное время. Дополнительное время необходимо на аналогово-цифровое преобразование и фильтрацию. Следующую выборку данных от датчиков можно получить через период, называемый периодом дискредитации по времени. Этот период задается таймером дискредитации.
Выдача управляющего воздействия может осуществляться или непосредственно после завершения работы, или с запаздыванием на один интервал квантования, то есть в начале следующего цикла выборки входных данных. Второй метод предпочтительнее, так как интервалы будут одинаковыми и постоянными по входу и выходу независимо от длительности цикла выполнения алгоритма внутри процессора.
3.Система сбора данных о технологических потоках и оборудовании.
3.1 Система регистрации данных
Регистрация данных осуществляется с помощью регистратора - устройства, которое автоматически собирает и запоминает информацию. Регистраторы данных можно разделить на следующие три группы:
- с аналоговым входом и аналоговым выходом;
- с аналоговым входом и аналоговым или цифровым выходом;
- с аналоговым или цифровым входом и аналоговым или цифровым выходами.
К первой группе можно отнести одноканальный аналоговый самописец для регистрации температуры, измеряемой с помощью термопары.
Во вторую и третью группы входят более сложные приборы, которые имеют многоканальные входы и снабжены мультиплексорами и АЦП для сбора экспериментальных данных.
Регистраторы можно подключить к ЭВМ. Для периодической передачи данных. Программируемый регистратор данных представляет собой прибор, который включает микропроцессор. По отношению к регистратору данных микропроцессор играет роль управляющего устройства. Программируемый регистратор данных может быть запрограммирован для решения необходимых задач: масштабирования, усечения, формирования аварийных сигналов.
3.2 Системы сбора данных.
Системы сбора данных в отличии от регистрации данных действует в замкнутом контуре управления, однако в настоящее время. когда регистратора данных подключают непосредственно к ЭВМ, различие стирается.
Системы сбора данных накапливают данные для их обработки в центральной ЭВМ.
Для регистратора данных число входных каналов может изменяться от 1 до 100, система сбора данных может быть более 1000 входов. Скорость у регистратора данных приблизительно 10 считываний в 1 сек., система сбора данных - до 1000 считываний в 1 сек., поэтому регистратор данных используется для решения отдельных локальных задач - система сбора данных функционирует в составе АСУТП.
3.3 Многоуровневое сканирование информации.
При управлении технологическим процессом возможна ситуация, когда общее число переменных, просматриваемых системой данных, становится слишком большим. Хотя применение мультиплексоров делает задачу контроля технически разрешимой, некоторые из информационных сигналов в условиях нормальной эксплуатации могут быть не использованы.
В этом случае удобно использовать систему многоуровневого сканирования. При многоуровневом сканировании может быть 2 и более уровня просмотра.Когда течение технологического процесса носит нормальный характер, например,протекание непрерывных процессов в стационарном режиме, могут контролироваться только ключевые переменные и состояния. Это верхний уровень просмотра.
Если поступающие данные сигнализируют о нарушениях функционирования процесса, то ЭВМ подключит нижний уровень просмотра, на котором осуществляется более полный сбор информации, а также изучение ее с целью выявления источника неполадок.
4.Организация сбора данных.
В зависимости от пространственного распределения технических средств системы сбора данных и их удаленности от центрального процессора различают три основные формы их организации:
- в непосредственной близости от обслуживаемого процесса и оборудования;
- на основе пунктов концентрации информации (децентрализованный сбор);
- на основе одного централизованного пункта регистрации (централизованный сбор).
Достоинством децентрализованного сбора информации является высокое быстродействие и повышенная надежность, недостатком - большое количество линий связи.
Централизованному сбору информации характерно меньшее быстродействие и меньшая надежность в связи с единственным концентратором данных.
По структуре информационных каналов различают 2 типа системы сбора данных:
- с пространственным разделением измерительных каналов;
- с временным разделением измерительных каналов.
Возможны два режима обмена информацией ЭВМ с контроллером:
- информационный;
- командный.
В информационном режиме ЭВМ может запрашивать информацию у контроллера и получать ее в следующем объеме:
- текущее значение любой переменной;
- состояние блокировок;
- значения массивов дискретных или аналоговых переменных.
ЭВМ может запрашивать информацию в любом режиме работы контроллера.
Обмен информацией состоит из отдельных сеансов связи. Сеанс состоит из передачи одного кадра от ЭВМ к контроллеру и передачи ответного кадра. Контроллер по своей инициативе сеанс обмена не начинает. Кадр является транспортным средством для передачи одного пакета информации функционального уровня. Длина кадра ЭВМ не более 32 байтов, обратного от контроллера - не более 512 байтов. Время запроса от ЭВМ до контроллера не должно превышать 1,5 сек., если ответный кадр от контроллера в течение 0,1 сек. не начал поступать, значит, произошел сбой, и следующий сигнал ЭВМ посылает через 1 сек. (численные данные приведены для микропроцессорного контроллера «Ломиконт - 112».
При организации системы сбора данных для выбора технических средств и программного обеспечения необходимо учитывать:
- количество источников информации;
- распределение источников информации в пространстве;
- распределение работы источников информации во времени;
- циклы опроса источников информации:
- допускаемую погрешность измерения;
- необходимость статистической обработки данных.
Лекция 6
5 Система восприятия информации.
Восприятие информации - это процесс преобразования информации, поступающей в техническую систему из внешнего мира в форму, пригодную для дальнейшего использования.
Для системы восприятия информации можно выделить несколько этапов переработки поступающей информации:
- регистрация информации о состоянии объекта;
- приведение входных данных к виду, стандартному для данной информационной системы;
- построение образно-семантической модели;
- распознавание объектов и ситуаций.
Принцип работы системы восприятия информации рассматривается на примере АСУ сортировкой деталей (изложение в учебном пособии авторов В.К. Битюков, Б.А. Голоденко «Автоматизация информационных технологий и процессов современных производств» на страницах 153 - 155.
Лекция 7
6.Информационное обеспечение АСУ.
6.1’ Назначение, состав и структура информационного обеспечения.
Основное назначение информационного обеспечения - своевременная выдача системе управления, в частности лицам, принимающим решение, достоверной информации, необходимой и достаточной для принятия оптимальных решений по управлению технологическими процессами.
В состав информационного обеспечения АСУ входит:
- система сбора, передачи. обработки, хранения и регистрации данных:
- система классификации и кодирования:
- система организации внутримашинной информационной базы данных;
- система организации внемашинной базы данных;
- внутримашинная база данных;
- внемашинная база данных.
Структура информационного обеспечения АСУ показана на рисунке 12.
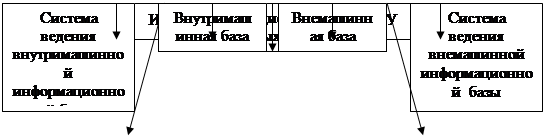 |
Рисунок 12 Структура информационного обеспечения АСУ.
6.2 Система классификации и кодирования.
Для упорядочения и систематизации описания предметов и понятий их распределяют по некоторым признакам на группы. Процесс такого упорядоченного распределения называют классификацией, учитываемые при этом признаки сходства или различия объектов называют основанием классификации.
Совокупность правил распределения оснований классификации образует систему классификации, в результате применения которой создается классификатор - систематизированный свод наименований и обозначений или шифров.
Системы классификации обеспечивают:
- достаточную емкость, чтобы вместить все множество классифицируемых объектов;
- гибкость, позволяющую расширить это множество без нарушения структуры классификации;
- глубину, позволяющую учитывать дополнительные признаки различия;
- возможность сопряжения с другими классификаторами.
Каждому объекту в классификаторе присваивается шифр в соответствии с принятой системой кодирования.
Цель кодирования - представление названия объекта в более компактной и удобной форме, чем его полное наименование, что необходимо при переносе их на машинный носитель. проведения обработки, передачи и других операций.
Наиболее важными свойствами системы кодирования являются:
- полнота, позволяющая охватить все множество описания объектов;
- унифицированность, обеспечивающая единство шифров всех объектов;
- однозначность, сохраняющая уникальность;
- дешифруемость, позволяющая обрабатывать шифры и затем отыскивать соответствующий объект.
В Советском Союзе была создана Единая система классификации и кодирования технико-экономической информации, содержащая общесоюзные классификаторы и системы кодирования.
Опыт создания АСУ на различных уровнях управления позволяет утверждать, что для каждого уровня управления оптимальной является своя система кодирования. Это означает, что введение одной системы для всех уровней управления экономически не эффективно.
В каждой АСУ применяется ограниченная номенклатура показателей, следовательно. длина общесоюзного кода будет неоправданно завышена.
Увязка общесоюзного кода с локальным решается с помощью машинного перекодирования.
Объектами классификации в АСУ является:
1 информационные массивы:
- входные (значения технологических параметров, состояние технологического оборудования. нормативно-справочная информация и так далее);
- промежуточные массивы;
- выходные (сообщения, фактические технико-экономические показатели и так далее)
2 технологическая информация (состояние технологического процесса в режиме реального времени);
3 экономические показатели;
4 формы документов;
5 документы;
6 истории процесса (видеограммы, мнемосхемы, таблицы, тексты сообщений)
Для всех кодируемых множеств чаще всего применяется буквенно-цифровой алфавит кода.
Пример1.
Описание массива информации о нормативно-справочной информации по параметрам технологического процесса. Обозначение массива НСИТП.
Перечень реквизитов в записи.
| Наименование реквизита | Длина в знаках | Вид информации |
| Код режимного параметра | цифровая | |
| Наименование параметра | символьная | |
| Единицы измерения | символьная | |
| Регламентируемые границы: min max | цифровая цифровая | |
| Допустимые отклонения | цифровая |
Длина записи - 51 знак.
Число записей - Ni, где i - номер АРМ оператора-технолога:
N - количество технологических параметров процесса.
Пример 2.
Расход сырья за сутки
Обозначение массива - СЫРСТ.
Перечень реквизитов
| Наименование реквизитов | Длина в знаках | Код информации |
| Код сырья | цифровая | |
| Смена А | цифровая | |
| Смена Б | цифровая | |
| Смена В | цифровая | |
| Сумма | цифровая |
Длина записи - 23 знака.
Число записей - k, где k - количество наименований сырья.
Курс лекций по ССиОИ (2-ой семестр)
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 736; Нарушение авторских прав?; Мы поможем в написании вашей работы!