КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Организация прерываний в микроЭВМ
|
|
|
|
Одной из разновидностей программно-управляемого обмена данными с ВУ в микроЭВМ является обмен с прерыванием программы, отличающийся от асинхронного программно-управляемого обмена тем, что переход к выполнению команд, физически реализующих обмен данными, осуществляется с помощью специальных аппаратных средств. Команды обмена данными в этом случае выделяют в отдельный программный модуль—подпрограмму обработки прерывания. Задачей аппаратных средств обработки прерывания в процессоре микроЭВМ как раз и является приостановка выполнения одной программы (ее еще называют основной программой) и передача управления подпрограмме обработки прерывания. Действия, выполняемые при этом процессором, как правило, те же, что и при обращении к подпрограмме. Только при обращении к подпрограмме они инициируются командой, а при обработке прерывания — управляющим сигналом от ВУ, который называют «Требование прерывания» или «Запрос на прерывание».
Эта важная особенность обмена с прерыванием программы позволяет организовать обмен данными с ВУ в произвольные моменты времени, не зависящие от программы, выполняемой в микроЭВМ. Таким образом, появляется возможность обмена данными с ВУ в реальном масштабе времени, определяемом внешней по отношению к микроЭВМ средой. Обмен с прерыванием программы существенным образом экономит время процессора, затрачиваемое на обмен. Это происходит за счет того, что исчезает необходимость в организации программных циклов ожидания готовности ВУ, на выполнение которых тратится значительное время, особенно при обмене с медленнодействующими ВУ.
Прерывание программы по требованию ВУ не должно оказывать на прерванную программу никакого влияния кроме увеличения времени ее выполнения за счет приостановки на время выполнения подпрограммы обработки прерывания. Поскольку для выполнения подпрограммы обработки прерывания используются различные регистры процессора (счетчик команд, регистр состояния и т. д.), то информацию, содержащуюся в них в момент прерывания, необходимо сохранить для последующего возврата в прерванную программу.
Обычно задача сохранения содержимого счетчика команд и регистра состояния процессора возлагается на аппаратные средства обработки прерывания. Сохранение содержимого других регистров процессора, используемых в подпрограмме обработки прерывания, производится непосредственно в подпрограмме. Отсюда следует достаточно очевидный факт: чем больший объем информации о прерванной программе сохраняется программным путем, тем больше время реакции микроЭВМ на сигнал прерывания, и наоборот. Предпочтительными с позиции повышения производительности микроЭВМ (сокращения времени выполнения подпрограмм обработки, а, следовательно, и основной программы) являются уменьшение числа команд, обеспечивающих сохранение информации о прерванной программе, и реализация этих функций аппаратными средствами.
Формирование сигналов прерываний — запросов ВУ на обслуживание — происходит в контроллерах соответствующих ВУ. В простейших случаях в качестве сигнала прерывания может использоваться сигнал «Готовность ВУ» (см. рис. 2.1, а, б), поступающий из контроллера ВУ в системный интерфейс микроЭВМ. Однако такое простое решение обладает существенным недостатком — процессор не имеет возможности управлять прерываниями, т. е. разрешать или запрещать их для отдельных ВУ. В результате организация обмена данными в режиме прерывания с несколькими ВУ существенно усложняется.
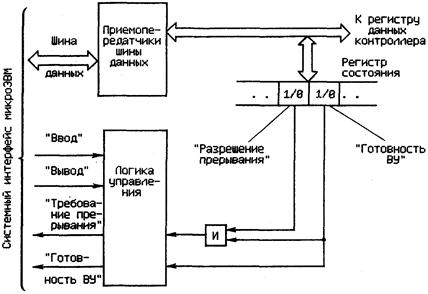
Рис. 2.11. Фрагмент блок-схемы контроллера ВУ с разрядом
«Разрешение прерывания» в регистре состояния
Для решения этой проблемы регистр состояния контроллера ВУ (рис. 2.11) дополняют еще одним разрядом — «Разрешение прерывания». Запись 1 или 0 в разряд «Разрешение прерывания» регистра состояния производится программным путем по одной из линий шины данных системного интерфейса. Управляющий сигнал системного интерфейса «Требование прерывания» формируется с помощью схемы совпадения только при наличии единиц в разрядах «Готовность ВУ» и «Разрешение прерывания» регистра состояния контроллера.
В микроЭВМ обычно используется одноуровневая система прерываний, т. е. сигналы «Требование прерывания» от всех ВУ поступают на один вход процессора. Поэтому возникает проблема идентификации ВУ, запросившего обслуживание, и реализации заданной очередности (приоритета) обслуживания ВУ при одновременном поступлении нескольких сигналов прерывания. Существуют два основных способа идентификации ВУ, запросивших обслуживания:
программный опрос регистров состояния (разряд «Готовность ВУ») контроллеров всех ВУ;
использование векторов прерывания.
Организация, прерываний с программным опросом готовности предполагает наличие в памяти микроЭВМ единой подпрограммы обслуживания прерываний от всех ВУ. Структура такой подпрограммы приведена на рис. 2.12. Обслуживание ВУ с помощью единой подпрограммы обработки прерываний производится следующим образом.
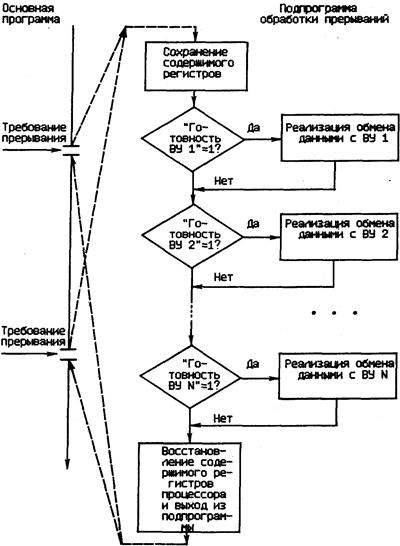
Рис. 2.12. Структура подпрограммы обработки прерывания и ее связь с основной программой
В конце последнего машинного цикла выполнения очередной команды основной программы процессор проверяет наличие требования прерывания от ВУ. Если сигнал прерывания есть и в процессоре прерывание разрешено, то процессор переключается на выполнение подпрограммы обработки прерываний.
После сохранения содержимого регистров процессора, используемых в подпрограмме, начинается последовательный опрос регистров состояния контроллеров всех ВУ, работающих в режиме прерывания. Как только подпрограмма обнаружит готовое к обмену ВУ, сразу выполняются действия по его обслуживанию. Завершается подпрограмма обработки прерывания после опроса готовности всех ВУ и восстановления содержимого процессора регистров.
Приоритет ВУ в микроЭВМ с программным опросом готовности ВУ однозначно определяется порядком их опроса в подпрограмме обработки прерываний. Чем раньше в подпрограмме опрашивается готовность ВУ, тем меньше время реакции на его запрос и выше приоритет. Необходимость проверки готовности всех ВУ существенно увеличивает время обслуживания тех ВУ, которые опрашиваются последними. Это является основным недостатком рассматриваемого способа организации прерываний. Поэтому обслуживание прерываний с опросом готовности ВУ используется только в тех случаях, когда отсутствуют жесткие требования на время обработки сигналов прерывания ВУ.
Организация системы прерываний микроЭВМ с использованием векторов прерываний позволяет устранить указанный недостаток. При такой организации системы прерываний ВУ, запросившее обслуживания, само идентифицирует себя с помощью вектора прерывания — адреса ячейки основной памяти микроЭВМ, в которой хранится либо первая команда подпрограммы обслуживания прерывания данного ВУ, либо адрес начала такой подпрограммы. Таким образом, процессор, получив из контроллера ВУ вектор прерывания, сразу переключается на выполнение требуемой подпрограммы обработки прерывания. В микроЭВМ с векторной системой прерывания каждое ВУ должно иметь собственную подпрограмму обработки прерывания.
Вектор прерывания выдается контроллером не одновременно с запросом на прерывание, а только по разрешению процессора, как это реализовано в схеме на рис. 2.13.
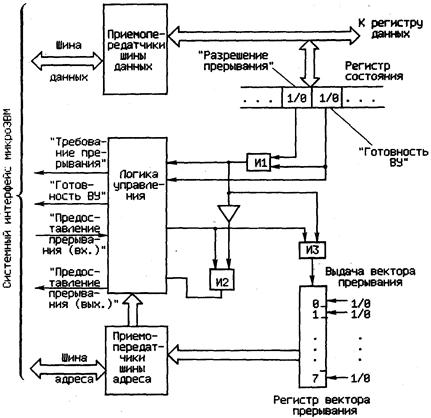
Рис. 2.13. Формирование вектора прерывания в контроллере ВУ
Это делается для того, чтобы исключить одновременную выдачу векторов прерывания от нескольких ВУ. В ответ на сигнал котроллера ВУ «Требование прерывания» процессор формирует управляющий сигнал «Предоставление прерывания (вх.)», который разрешает контроллеру ВУ, запросившему обслуживание, выдачу вектора прерывания в шину адреса системного интерфейса Для этого в контроллере используются регистр вектора прерывания и схема совпадения ИЗ. Регистр вектора прерывания обычно реализуется с помощью перемычек или переключателей, что позволяет пользователю микроЭВМ устанавливать для конкретных ВУ требуемые значения векторов прерывания.
Управляющий сигнал «Предоставление прерывания (вых.)» формируется в контроллере ВУ с помощью схемы совпадения И2. Этот сигнал используется для организации последовательного аппаратного опроса готовности ВУ и реализации тем самым требуемых приоритетов ВУ. Процессор при поступлении в него по общей линии системного интерфейса «Требование прерывания» сигнала прерывания формирует управляющий сигнал «Предоставление прерывания (вх.)», который поступает сначала в контроллер ВУ с наивысшим приоритетом (рис. 2.14).
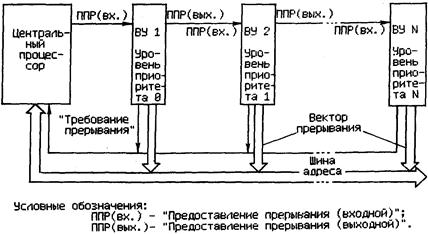
Рис. 2.14. Реализация приоритетов ВУ в микроЭВМ с векторной системой прерывания
Если это устройство не требовало обслуживания, то его контроллер пропускает сигнал «Предоставление прерывания» на следующий контроллер, иначе дальнейшее распространение сигнала прекращается и контроллер выдает в шину адреса вектор прерывания.
Аппаратный опрос готовности ВУ производится гораздо быстрее, нежели программный. Но если обслуживания запросили одновременно два или более ВУ, обслуживание менее приоритетных ВУ будет отложено на время обслуживания более приоритетных, как и в системе прерывания с программным опросом.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 419; Нарушение авторских прав?; Мы поможем в написании вашей работы!