КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Компенсация реактивной мощности
|
|
|
|
Естественная компенсация реактивной мощности.
Естественная компенсация реактивной мощности не требует больших материальных затрат. Одним из основных условий рационального электроснабжения предприятия является соответствие мощностей электродвигателей и потребляемым мощностям механизмов, приводимых этими электродвигателями в движение.
К естественной компенсации реактивной мощности относятся:
· упорядочение технологического процесса, ведущее к выравниванию графика нагрузок (равномерное распределение нагрузок по фазам, смещение обеденного времени для разных цехов и др.),
· создание рациональной системы электроснабжения за счёт уменьшения количества ступеней трансформации,
· замена трансформаторов старой конструкции на новую с меньшими потерями на перемагничивание,
· замена малозагруженных трансформаторов и двигателей трансформаторами и двигателями меньшей мощности и их полная загрузка,
· ограничение продолжительности режима холостого хода электродвигателей,
· отключение части силовых трансформаторов при малой загрузке (например, в выходные дни),
· замена асинхронных двигателей синхронными, поскольку синхронные двигатели при перевозбуждении могут работать с коэффициентом мощности, близким к единице, и даже выдавать реактивную мощность в сеть.
Благодаря естественной компенсации реактивной мощности можно лишь частично разгрузить систему электроснабжения от реактивной мощности. В большинстве случаев естественной компенсации реактивной мощности не достаточно для повышения коэффициента мощности до требуемого значения. Поэтому, для обеспечения работы генераторов с номинальными параметрами и для разгрузки сети от реактивной мощности целесообразно часть этой мощности генерировать на месте её потребления. Такая компенсация называется «поперечной».
Основными источниками реактивной мощности, устанавливаемыми на месте потребления являются синхронные компенсаторы и конденсаторные батареи. Наиболее широко используются статические конденсаторы на напряжение до 1000В и 6-10кВ. В случаях, когда компенсирующие устройства остаются подключенными к сети, а потребители реактивной мощности отключаются от неё, происходит перекомпенсация. Результатом этого является увеличение суммарных потерь мощности и усложнение устройств регулирования напряжения. Поэтому нашли применение управляемые компенсирующие устройства на основе полупроводниковых приборов.
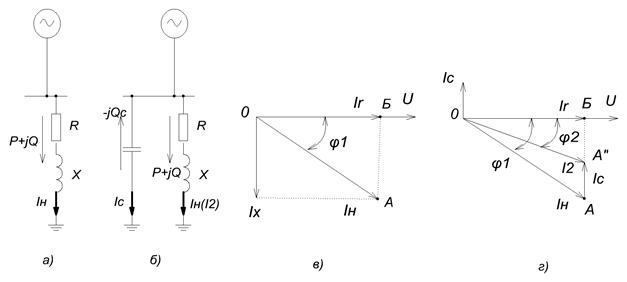
Рис. 9.1 Схемы без компенсации (а) и с компенсацией (б) реактивной мощности и их векторные диаграммы.
Наглядное представление о сущности компенсации реактивной мощности даёт рис. 9.1. До компенсации потребитель имел активную мощность Р, соответственно ток Ir и реактивную мощность от реактивной нагрузки Q c соответствующим током Ix. Полной мощности соответствует вектор Iн. Коэффициент мощности до компенсации cosφ1.
После компенсации, то есть после подключения параллельно нагрузке конденсатора с мощностью Qc суммарная реактивная мощность потребителя будет Q-Qc (ток Ix-Ic). Угол φ уменьшится, и коэффициент мощности повысится с cosφ1 до cosφ2. Полная потребляемая мощность при той же активной мощности снизится с S1 (ток Iн) до S2 (ток I2). Поэтому при том же сечении можно повысить пропускную способность линии по активной мощности.
В идеале необходимо проводить полную компенсацию, когда Q=Qc, но в реальности такая ситуация недостижима из-за постоянно меняющейся конфигурации сети, изменения режима работы приёмников и т.п.
При компенсации реактивной мощности уменьшаются и потери напряжения в электропередачах. Если до компенсации потеря напряжения определялась выражением (9.2), то при наличии компенсации мы будем иметь:
 (9.4)
(9.4)
Как уже отмечалось, компенсацию реактивной мощности производят с помощью конденсаторных батарей, которые получили наибольшее распространение. Широкое распространение конденсаторных батарей объясняется их преимуществами: незначительные удельные потери активной мощности, отсутствие вращающихся частей, простота монтажа, относительно невысокие массогабаритные и стоимостные показатели, отсутствие шума во время работы и др. Однако существуют и недостатки: пожароопасность, наличие остаточного заряда, который необходимо снимать, чувствительность к перенапряжениям, потребность в специальных условиях утилизации отработавших батарей.
В сетях с резкопеременной ударной нагрузкой, а так же для плавной регулировки уровня компенсации рекомендуется применение комбинированных быстродействующих источников реактивной мощности (рис. 9.2). Регулирование индуктивности в данном случае осуществляется тиристорами VS.
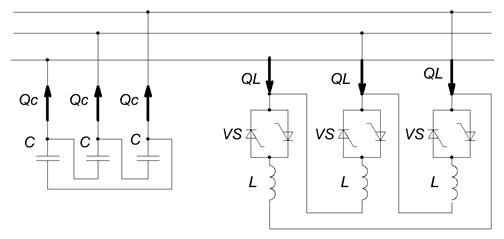
Рис. 9.2 Принципиальная схема быстродействующего компенсирующего устройства.
Другим техническим средством компенсации реактивной мощности, которое получило распространение, является синхронный компенсатор. Он представляет собой синхронный двигатель без нагрузки на валу. Он может работать как в режиме генерирования реактивной мощности, так и режиме её потребления. Изменение генерируемой или потребляемой реактивной мощности компенсатора осуществляется регулированием его возбуждения.
Достоинством синхронного компенсатора, как источника реактивной мощности является возможность плавного регулирования генерируемой реактивной мощности и высокая стойкость в режимах короткого замыкания и перенапряжения.
Основным отличием синхронного двигателя от асинхронного является то, что магнитное поле, необходимое для действия двигателя, создаётся в основном от отдельного источника постоянного тока (возбудителя). Вследствие этого в нормальном режиме синхронный двигатель почти не потребляет из сети реактивной мощности, необходимой для создания главного магнитного потока, а в режиме перевозбуждения (при опережающем коэффициентом мощности) может генерировать реактивную мощность в сеть.
Синхронные двигатели могут вырабатывать реактивную мощность при напряжении Uном:
Q=0,5Pном (9.5)
Одним из недостатков синхронных двигателей является дополнительные активные потери в обмотке, вызываемые генерируемой реактивной мощностью:
 , (9.6)
, (9.6)
Где Qном – номинальная реактивная мощность, r – cопротивление одной фазы обмотки двигателя.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 845; Нарушение авторских прав?; Мы поможем в написании вашей работы!