КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Лекция 5. Кинематика зубчатых передач с неподвижными осями
|
|
|
|
Кинематика зубчатых передач с неподвижными осями
В зубчатых передачах вращение осуществляется зацеплением специально профилированных зубьев, при этом на каждом из зубчатых колес имеются окружности, называемые начальными, которые перекатываются друг по другу без скольжения.
В точке А касания начальных окружностей с радиусами r1 и r2 (рис.11) окружная скорость рассчитывается так:
 .
.
Рис.11
При отсутствии скольжения передаточное отношение вычисляется по формуле
 .
.
При внешнем зацеплении – знак минус; при внутреннем зацеплении – знак плюс.
Одним из основных параметров зубчатого зацепления является модуль. При этом
где m – модуль зацепления;
z1, z2 – числа зубьев колес.
Таким образом
 .
.
Одноступенчатая зубчатая передача (рис..6,7,8) позволяет реализовать передаточное отношение  . При больших передаточных отношениях используют многоступенчатые передачи, например трехступенчатые (рис. 12).
. При больших передаточных отношениях используют многоступенчатые передачи, например трехступенчатые (рис. 12).
Ведущим в передаче является колесо 1, ведомым – 6, общее передаточное отношение:
 .
.
Действительно,

но ω2 = ω 3, ω4 = ω5, поскольку колеса 2,3 и 4,5 закреплены на единых валах. Таким образом:
 .
.
Для пространственных передач (например, конических) величина передаточного отношения определяется аналогично вышеизложенному.
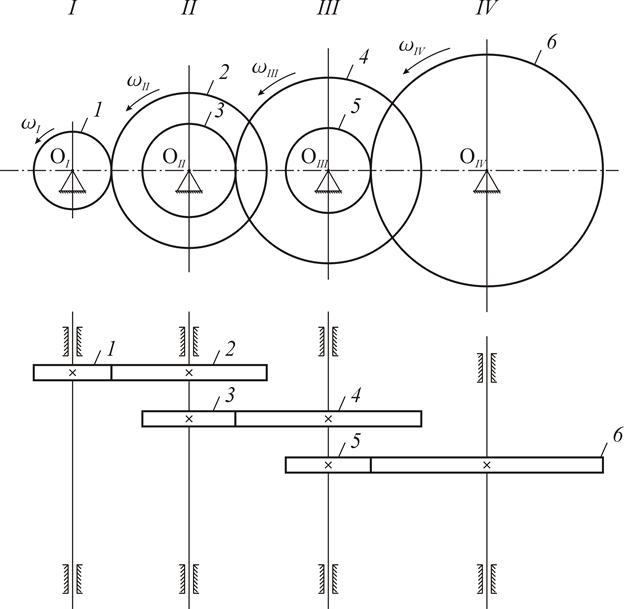 Рис.12
Рис.12
Что касается знака, то для одноступенчатой передачи он не рассматривается, а для многоступенчатой имеет смысл только в том случае, если оси ведущего и ведомого колес параллельны.
В этом случае можно использовать метод стрелок, в соответствии с которым в точке касания начальных окружностей стрелки, символизирующие скорости, либо сходятся, либо расходятся. Тогда по взаимному расположению стрелок на ведущем и ведомом колесах определяют знак общего передаточного отношения: сонаправлены – плюс (рис. 14), противонаправлены – минус (рис. 13).
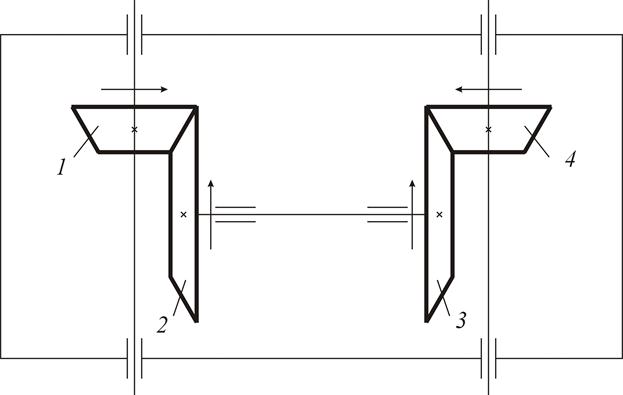 Рис.13
Рис.13
 .
.
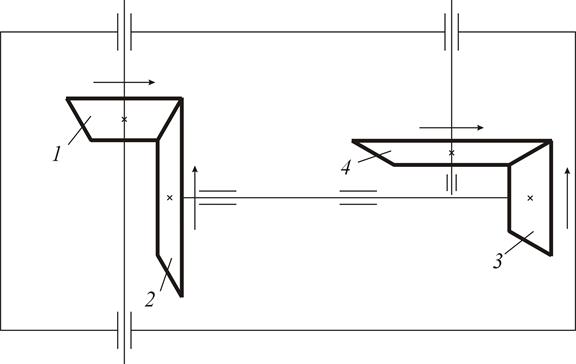
Рис.14
 .
.
Кинематика планетарных и дифференциальных редукторов
Передаточные отношения механизмов, у которых имеются зубчатые колеса с подвижными осями (рис..10), определяют с помощью метода обращенного движения.
Для этого механизму мысленно придают дополнительную угловую скорость, равную по величине и противоположную по направлению угловой скорости водила – ωн. Это не изменит относительного движения звеньев, абсолютные же скорости будут другими:
| Звено | H | |||
| Скорость в истинном движении | 
| 
| 
| 
|
| Скорость в обращенном движении | 
| 
| 
| 
|
Таким образом, в обращенном движении водило останавливается и дифференциальный или планетарный механизм преобразуются в механизм с неподвижными осями вращения зубчатых колес, для которого справедливо отношение
 .
.
При решении практических задач по определению передаточных отношений дифференциальных редукторов в исходных данных должны быть указаны числа зубьев всех зубчатых колес и угловые скорости двух звеньев.
Для планетарных редукторов, в которых одно из центральных колес закреплено, достаточно знать числа зубьев зубчатых колес.
Например, при неподвижном центральном колесе 3, ω3=0. Тогда
 ;
;
 .
.
Как видно из рис./10, зубчатый механизм может быть работоспособным только в том случае, если оси вращения центральных колес и водила совпадают. Это называется условием соосности, из которого следует:
 ;
;

При равенстве модулей всех зубчатых зацеплений:
 Таким образом, если в исходных данных задачи по определению передаточного отношения не указано число зубьев одного из зубчатых колес, его можно найти по условию соосности.
Таким образом, если в исходных данных задачи по определению передаточного отношения не указано число зубьев одного из зубчатых колес, его можно найти по условию соосности.
Кроме условия соосности, при проектировании планетарных и дифференциальных редукторов должна быть проведена проверка по выполнению еще двух условий:
Рис. 15
1. Условие соседства
При сборке редуктора соседние сателлиты не должны касаться друг друга (рис.15).
Это будет при выполнении условия  , где
, где  – радиус окружности вершин зубьев сателлита.
– радиус окружности вершин зубьев сателлита.
 ,
,
где  – радиусы начальных окружностей центрального колеса_1 и сателлита_2.
– радиусы начальных окружностей центрального колеса_1 и сателлита_2.
λ – угол между осями соседних сателлитов
 ,
,
где  – количество сателлитов.
– количество сателлитов.
Таким образом, условие соседства имеет вид:
 .
.
Если не учитывать смещение исходного контура при нарезании зубьев (x.=.0), то с достаточной степенью точности можно принять
 ,
,
где  – радиусы делительных окружностей центрального колеса 1 и сателлита 2.
– радиусы делительных окружностей центрального колеса 1 и сателлита 2.
Таким образом,
 .
.
2. Условие сборки
При сборке механизма, имеющего несколько сателлитов, зубья этих сателлитов должны полностью совпадать с впадинами зубьев центральных колес 1 и 3. Это будет выполняться при условии
 ,
,
где k – целое число.
Таким образом, сумма чисел зубьев центральных колес должна быть кратна числу сателлитов.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 879; Нарушение авторских прав?; Мы поможем в написании вашей работы!