КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Методы и режимы измерения дальности
|
|
|
|
Измерение дальности может осуществляться импульсным (временным) или фазовым методами при этом режимы измерения могут быть запросным или беззапросный.
а) Импульсный (временной) метод
Запросный режим измерения
На рис.6 представлена структурная схема дальномера и временные процессы, протекающие в нем.
 |
Рис. 6. Структурная схема импульсного дальномера
Запросчик на ВС (или на земле) излучает сигналы запроса, а ретранслятор принимает их и переизлучает как сигналы ответа. Переизлученные сигналы принимаются запросчиком. Так как скорость распространения радиоволн постоянна, то принятые на борту ответные сигналы ретранслятора, запаздывают по отношению к излученным сигналам на время:
t з = 2r/c или r = c∙tз /2,
где r - расстояние между ВС и ретранслятором;
с - скорость распространения радиоволн.
Т.к. с = const, то r ~ tз .
Погрешность измерения: Δr = c∙Δtз/2,
где: Δr – погрешность измерении дальности; Δtз – погрешность измерения времени запаздывания (инструментальная погрешность дальномера).
Достоинства запросного режима: высокая точность, простота бортовой аппаратуры.
Недостатки: ограниченная пропускная способность, наличие дополнительного передатчика на борту ВС.
Беззапроснымй режим измерения
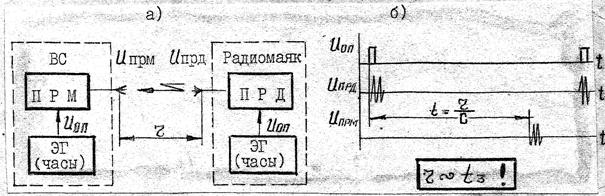 |
Рис. 7. Структурная схема беззапросного дальномера
Рис. 7. Схема беззапросного дальномера
Сущность беззапросного режима заключается в следующем. На борту ВС и в наземном пункте, расстояние между которыми подлежит определению, устанавливаются согласованные друг с другом точные часы (ЭГ). На выходе этих часов в строго определенные моменты времени формируются импульсные метки (метки времени) U оп (рис.7 б). На борту и на земле такие метки формируются в один и тот же момент времени. На земле (в радиомаяке) ПРД излучает импульсный сигнал в момент формирования метки Uоп. На борту он будет спустя время tз = r/c, где r - расстояние между ВС и наземным радиомаяком. Измерив на борту временной интервал межу импульсом метки времени U оп и принятым импульсом ПРД маяка, можно определить расстояние между ВС и маяком:
r = c∙ tз
Погрешность измерения: Δr = c∙ Δtз,
где:Δr – погрешность измерения дальности;
Δtз = Δt + Δt эг – погрешность измерения времени запаздывания, равная сумме инструментальной погрешности дальномера Δt и погрешности рассогласования между ЭГ (часами) на борту и радиомаяке Δt эг.
Достоинства беззапросного режима: отсутствие дополнительного ПРД на борту ВС; неограниченная пропускная способность.
Недостатки: потребность в использовании высокоточных эталонных генераторов (часов) меток времени и необходимость в периодическом согласовании их показаний.
б) Фазовый метод измерения
Метод основан на измерении фазового сдвига Δφ между несущими колебаниями излученного и ретранслированного сигналов в случае запросного режима измерений или между излученными и принятыми сигналами в случае беззапросного режима.
Предположим, что передатчик запросчика излучает гармонический сигнал вида
е з = Е mз· sin ωt.
В точку приема он вернется, сдвинутый во времени относительно излученного на величину
t з = 2r/c и будет иметь вид (рис.8).

Рис. 8. Запросный и ответный сигналы при фазовых измерениях
е отв = Е m отвsinω(t-2r/c).
Обозначим фазы излучаемого и принимаемого сигналов как
φ з = ωt и φ отв = ωt-2ωr/с.
Тогда разность фаз Δφ будет равна
Δφ = φ з - φ отв = 2ωr/c
Измерив, фазовый сдвиг Δφ можно определить искомое расстояние
r = c·Δφ/2ω.
Учтя, что ω=2πf, а с/f = λ получим окончательные выражения:
- r = λ·Δφ/4π при запросном режиме измерения;
- r = λ·Δφ/2π - при беззапросном режиме.
Недостаток метода: возможна неоднозначность измерений, если r > λ.
Погрешность измерения: Δr = δφ∙λ/ 4π - при запросном режиме измерения или
Δr = δφ∙λ/ 2π - при беззапросном режиме;
- δφ инструментальная погрешность измерения разности фаз Δφ.
в) Квазидальномерный метод измерения координат ВС
При беззапросном режиме измерения точность измерения дальности зависит от точности синхронизации и стабильности эталонных генераторов (часов) как на борту, так и на земле. Реально используемые часы задают моменты начала отсчета с погрешностью. Обозначим ее величиной Δtч. Погрешность часов обуславливает погрешность измерения дальности
Δr = c∙Δtч.
Если погрешность Δr велика, то реально определяемая на борту ВС дальность отличается от истинной и получила название псевдодальности. Метод определения координат ВС, основанный на измерении псевдодальностей до нескольких РНТ, называется псевдодальномерным (рис.9).
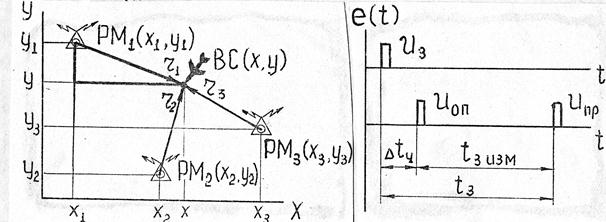
Рис. 9. К пояснению псевдодальномерного метода определения координат ВС
Измерив две дальности r1 и r2, можно определить координаты ВС путем решения системы двух уравнений:
(x - x1)2 + (y - y1)2 =r12
(x - x2)2+ (y - y2)2 = r22
В случае беззапросного режима дальность до i-го радиомаяка измеряется с погрешностью Δr, вызванной уходом бортовых часов Δt ч:
t з= t з изм+Δt ч; ri = с(t з изм +Δt ч); Δr = c∙Δt ч.
Измерив, расстояние до третьего маяка, можно не только точно определить координаты ВС, но и рассчитать поправку к показаниям бортовых часов.
(x - x1)2 + (y - y1)2=с2(t з изм1+Δt ч)2
(x - x2)2 + (y - y2)2 = с2(t з изм2 +Δt ч)2
(x - x3)2+ (y - y3)2 = с2(t з изм3 +Δt ч)2
Точность дальномерных измерений
Погрешность измерения дальности возникает, если принятое значение скорости распространения радиоволн отличается от истинного или время запаздывания измеряется с погрешностью.
Погрешность определения расстояния:
 ,
,
где  - ошибка определения дальности;
- ошибка определения дальности;
 - отклонение среднего значения скорости распространения радиоволн;
- отклонение среднего значения скорости распространения радиоволн;
 - ошибка измерения времени запаздывания.
- ошибка измерения времени запаздывания.
 В случае запросного режима измерения будем иметь
В случае запросного режима измерения будем иметь
 .
.
Даже при высоком техническом совершенстве дальномера, когда  , дальномерная ошибка
, дальномерная ошибка
 ,
,
откуда
 ,
,
Оценим величину погрешности дальномера для различных значений погрешностей измерения времени запаздывания и скорости распространения радиоволн.
Допустим, что R = 300 км; с = 3∙105км/с; t R = 10 -3 c; ∆c = 10 км/c;
∆t R = 0,1∙10 -6c, тогда получим ∆R = 40м.
Если ∆с = 1км/с, а ∆t R = 0,01∙10 -6c, то ∆R = 4м.
Среднеквадратическое значение погрешности измерения дальности σ R можно определить как
σ R = ,
,
где σ с - среднеквадратическая погрешность измерения дальности из-за погрешности скорости распространения радиоволн;
σt - среднеквадратическая погрешность измерения времени запаздывания.
Для данных нашего примера σ c = 10м, а σ t = 30м, тогда σ R = 32м.
Для определения времени запаздывания радиоволн необходимо знать момент их излучения, представляющих начало отсчета. С этой целью в точке приема надо хранить начало отсчета времени (момент излучения).
Для этой цели служат хронизаторы (синхронизаторы), основанные на использовании высокостабильных колебаний кварцевых или молекулярных (атомных) генераторов.
Относительная стабильность ∆t/T таких генераторов в настоящее время может быть доведена до величин:
- для кварцевых генераторов 3∙10 -8;
- для цезиевых генераторов 2∙10 -11.
Уход таких «часов» ∆t зависит от продолжительности времени хранения Т и, следовательно, определяет дополнительно погрешность определения дальности. Учитывая этот фактор, можно оценить допустимый период синхронизации эталонов времени.
Для того чтобы погрешность измерения дальности не превышала 0,2 км, допустимая продолжительность беззапросных измерений с помощью кварцевых эталонов со стабильностью 10-7 должна составлять 6с, кварцевые генераторы со стабильностью 10-10 пригодны для работы в течение 1,5ч, атомные эталоны со стабильностью 10-12 допускают измерения в течение 150ч.
В дальномерах с ретрансляцией сигналов процесс хранения начала отсчета существенно упрощается, т.к. время хранения составляет интервал от момента излучения запроса до момента приема ответного сигнала и составляет доли секунды. При максимальной дальности действия системы в 300км это время будет равно 2∙10-3с.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 6134; Нарушение авторских прав?; Мы поможем в написании вашей работы!