КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Структура и принцип работы
|
|
|
|
РМСП СМВ представляет собой точную угломерно-дальномерную систему и выполняет следующие функции:
- получение на борту ВС и выдачу экипажу и в САУ информации об угловых отклонениях ВС от заданной траектории посадки в вертикальной (угол места) и горизонтальной (азимутальный угол) плоскостях;
- измерение дальности до расчетной точки приземления;
- передача на борт ВС разнообразной дополнительной информации.
При необходимости состав системы может быть расширен для обеспечения азимутальной информацией на этапе ухода на второй круг (и возможно на взлете), угломестной информацией на этапе выравнивания.
РМСП СМВ имеет большие размеры секторов пропорционального наведения ВС (рис.21.б), что позволяет формировать оптимальные траектории захода на посадку. Эти системы могут одновременно обслуживать большое число ВС, следующих по различным траекториям на всех этапах захода на посадку, посадки и руления, а также при взлете и уходе на второй круг.
Основной вариант комплектации наземного оборудования РМПС СМВ удовлетворяет
требованиям II категории, включает КРМ1, ГРМ1, ретранслятор дальномера и аппаратуру КДП, обеспечивающую автоматическую передачу данных на борт ВС, дистанционное управление РМ и сигнализацию.
Расширенный вариан т удовлетворяет требованиям III категории и включает, кроме подсистем, аналогичных подсистемам основного варианта, также КРМ обратного азимута
КРМ 2.
Схема предполагаемого размещения оборудования РМСП СМВ приведена на рис. 38.

Курсовые радиомаяки излучают сигналы специальной формы (рис.39), с помощью которых на ВС измеряется азимутальный угол. Сигналы глиссадных радиомаяков позволяют получить на ВС информацию об угле места. Информация о дальности появляется на ВС в результате работы точной импульсной дальномерной системы, включающей запросчик дальности ЗД и наземный ретранслятор дальномера РД.
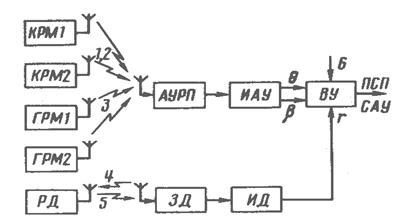
Рис. 39. Структурная схема РМСП:
1,2,3 - азимутальная, дополнительная и угломестная информация соответственно; 4 - запрос дальности; 5 - ответ (информация о дальности); 6 - параметры траектории посадки
Бортовое оборудование включает ряд функциональных элементов:
- азимутально-угломестный радиоприемник АУРП;
- измеритель азимутального угла и угла места ИАУ;
- запросчик дальности ЗД;
- измеритель дальности ИД;
- вычислительно устройство ВУ.
Оно обеспечивает прием сигналов радиомаяков и измерение трех координат ВС: азимутального угла θ, угла места β, и расстояния r (рис.40).
Указанные информация поступают в ВУ, которое преобразует их и вырабатывает данные о координатах Z и Н.
Для определения этих координат на ВС передаются данные о длине ВПП и размещении радиомаяков относительно ВПП, в результате чего может быть вычислено расстояние от ВС до точки размещения любого радиомаяка, а затем координаты
Z = r·sinΘ и Н = r0·sinβ.
В ВУ эти координаты сопоставляются с параметрами заданной траектории посадки. Сигналы отклонения ВС от заданной посадочной траектории ΔZ и ΔН, а также удаление до точки приземления подаются на приборы системы посадки (ПСП) и в систему автоматического управления (САУ). Иначе говоря, в ВУ формируется требуемая пространственно-временная траектория посадки, которая зависит от летоно-технических характеристик ВС и особенностей захода конкретного аэродрома.
Принцип функционирования радиомаяков РМСП
Принцип действия КРМ и ГРМ одинаков. Они являются радиомаяками со сканирующим лучом диаграммы направленности и реализуют временной метод измерения угловых координат с опорным временем.
Радиомаяк со сканирующим лучом состоит из передатчика ПРД и антенного устройства А (рис. 41).
Передатчик создает немодулированные СВЧ колебания, поступающие в антенное устройство, которое формирует узкий луч (в горизонтальной плоскости у КРМ или в вертикальной плоскости у ГРМ), который сканирует в горизонтальной (для КРМ) или вертикальной (для ГРМ) плоскости в заданном секторе.
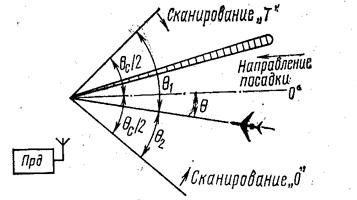
Рис. 41. Сканирование луча ДНА в радиомаяках РМСП СМВ
Диаграммы направленности РМ имеют веерообразную (ножевидную) форму (рис. 42 а, б). Работа КРМ и ГРМ разнесено во времени, т.е. в них реализуется временное разделение каналов измерений и каналов передачи данных, благодаря чему все РМ и аппаратура передачи данных работают на одной и той же несущей частоте.
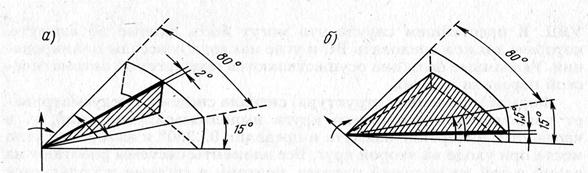 |
Рис. 42. Рабочие секторы и диаграммы направленности КРМ (а) и ГРМ (б) РМСП СМВ
Лучи ДНА сканируют упорядоченным образом. В некоторый момент времени (опорное время t оп), которое известно на ВС, так как информация о нем передается радиомаяком, начинается движение луча в направлении увеличения углов “Т” (туда) от границы сектора обзора. После достижения другой границы сектора и некоторой паузы происходит движение луча в обратном направлении “О” (обратно).
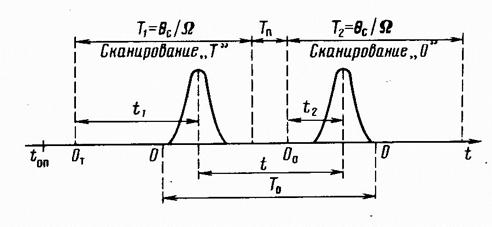
Рис. 43. Временные диаграммы сигналов радиомаяка РМСП, принимаемых на ВС
На ВС в те моменты времени, когда луч радиомаяка ориентирован в направлении ВС, принимаются два импульсных сигнала “Т” и “О. Моменты их возникновения зависят от углового положения ВС относительно биссектрисы сектора сканирования (рис.43).
Временной интервал между импульсами “Т” и “О” определиться как:
t = T1 + Tп + t2 - t1,
где: Т1 = Θс / Ώ - время движения луча в направлении “Т”; Θс - ширина сектора сканирования;
Ώ - угловая скорость сканирования луча; Тп - время паузы между сканированиями “Т” и “О”;
t 1= Θ1 / Ώ - время движения луча от границы сектора в направлении “Т” до направления на ВС;
t2 = Θ2 / Ώ - время движения луча от границы сектора в направлении “О” до направления на ВС;
Θ1 и Θ2 - угловые положения ВС относительно границ сектора.
С другой стороны
t1 = (Θс/2+Θ)/Ώ и t2 = (Θс/2-Θ)/Ώ.
С учетом этого имеем
t = Θс/Ώ + Tп - 2Θ/Ώ.
В направлении Θ = 0 (биссектриса сектора) t = Θс/Ώ + Tп = T0.
С учетом последнего выражения
t = T0 - 2Θ/Ώ или
Θ = (T0 - t) Ώ/2 = K(T0 - t).
Это выражение показывает, что угловое отклонение ВС от нулевого направления прямо пропорционально разности временного интервала между импульсами “Т” и “О” на нулевом направлении и текущим временным интервалом между этими импульсами. Так как T0 = const, временной интервал t зависит только от углового положения ВС Θ, и поэтому для определения на ВС угла Θ нужно измерить временной интервал между импульсами “Т” и “О”.
Кроме координатной информации, радиомаяки РМСП СМВ передают дополнительную информацию (основные и вспомогательные данные).
В качестве основных данных передается следующая информация:
- расстояние от антенны КРМ 1 до порога ВПП;
- границы зоны пропорционального наведения по азимуту;
- ширина луча ДНА;
- расстояние от ТНО до порога ВПП;
- расстояние от антенны РД до порога ВПП;
- минимальный угол наклона глиссады;
- высота угломестной антенны и ее смещение.
К вспомогательным данным относятся:
- информация о размещении наземного оборудования;
- информация о состоянии ВПП;
- метеорологическая информация и др.
С помощью РМСП СМВ осуществляется автоматическая передача на ЛА информации об аэродроме (ВПП), его категории, а также данные технического характера, необходимые для точного выполнения захода на посадку. Указанные функции выполняет подсистема автоматической передачи данных.
Эксплуатационно-технические характеристики измерительных и информационных подсистем различных типов РМСП СМВ приведены в таблице 5.
Таблица 5
| Диапазон частот, МГц: для угломерного оборудования для дальномерного оборудования | 5000…5750 960…1215 |
| Число рабочих каналов | |
| Зона действия: по азимуту, град по углу места, град по обратному азимуту, град по дальности, км дальность по обратному азимуту, км | ± 62 0,9…20 ±42 9,3 |
| Погрешность (2s), м: по дальности по азимуту* по углу места* | 30,5 4,1 0,4 |
Примечание:* У начала ВПП длиной 3000 м.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1607; Нарушение авторских прав?; Мы поможем в написании вашей работы!