КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Принцип функционирования ВРМ
|
|
|
|
В составе принимаемого на самолёте сигнала от маяка VOR имеются сигналы опорной фазы и переменной фазы. Фаза опорного сигнала не зависит от положения самолёта относительно маяка, а фаза переменного сигнала зависит от направленияприёма. Измеряя разность фаз между ними в точке приёма, можно определить направление на маяк.
Рассмотрим процесс формирования сигнала VOR (рис.1).

Рис. 50. Формирование сигнала “переменной” фазы в радиомаяке VOR
Антенна маяка VOR имеет диаграмму направленности (ДН) по напряжённости поля
DH = 1+ m∙cos φ при m = 0,3 (улитка Паскаля). По форме эта ДН близка к форме окружности со смещённым центром.
ДН антенны маяка вращается со скоростью 30 об/сек (Fвр = 30 Гц).
Пусть в момент t = 0 максимум ДН направлен на магнитный север, т.е. магнитный меридиан проходит через ось симметрии ДН. Отметим, что все маяки VOR ориентированы на магнитный север.
Положение наблюдателя (самолёта) относительно маяка VOR принято характеризовать магнитным азимутом (магнитным пеленгом), т.е. углом между магнитным меридианом, проходящим через маяк, и направлением от маяка на наблюдателя. Угол измеряется от магнитного меридиана по часовой стрелке от 0 до 360 град. В дальнейшем вместо термина «магнитный азимут» («магнитный пеленг») будем употреблять термин «азимут». Таким образом, на рис.1а азимут наблюдателя А равен 0 град, а азимут наблюдателя В равен α.
Пусть в момент t = 0 напряжённость поля излучения антенны в направлении 0W и 00ST равна 1, в направлении 0N равна 1+ m, а в направлении 0S равна 1- m.
Предположим, что маяк излучает немодулированную несущую fo. Тогда сигнал, принятый наблюдателем в точке А, можно записать в виде
uA = Um ∙ [ 1+ m∙ cos(2π ∙Fвр∙t)] cos 2πf∙t
а сигнал, приятый наблюдателем в точке В, в виде
uВ = Um∙ [1 + m cos(2π∙Fвр∙ t - α)] cos 2πf∙t.
Таким образом, в точках А и В наблюдатели получили на входах приёмников амплитудно-модулированный сигнал. Коэффициент модуляции m для маяков V0Р равен 30%.
В точке А максимум модулирующего напряжения достигается в момент t0, а в точке В - в момент t1. Если бы наблюдателю В был известен момент времени t0, то измеряя t1- t0 и зная частоту вращения ДН, можно было бы вычислить свой азимут α.
Для того, чтобы сообщить наблюдателю момент совпадения максимума ДН с направлением
на магнитный север (т.е. момент t0), в маяке формируют сигнал «Опорной фазы» - гармонику частотой 30 Гц, максимум которой соответствует моменту t0 (рис.2а) и сигнал поднесущей - гармонику частотой 9960 Гц.
Рис. 51. Суммарный сигнал радиомаяка VOR
Поднесущую модулируют по частоте сигналом «Опорной фазы» с девиацией частоты
± 480 Гц. Таким образом, что в момент совпадения максимума ДН с направлением на север сигнал поднесущей имеет максимум частоты, равный 10440 Гц (рис.2б). Далее частотно-модулированной поднесущей модулируют излучаемый маяком сигнал по амплитуде с коэффициентом модуляции 30%. На рис.2в показан ВЧ сигнал, принимаемый наблюдателем в точке В. Его огибающая имеет сложный вид и содержит в себе информацию об «Опорной фазе» и о «Переменной фазе» (временные масштабы на рис.2 искажены).
В приёмнике после обработки выделяют сигналы «Опорной фазы» и «Переменной фазы». Измеряя разность фаз между ними, вычисляют азимут наблюдателя.
Следует отметить, что в действительности сигнал маяка V0R может формироваться различными способами, например, с помощью двух антенн - одной неподвижной и одной подвижной, или за счёт электронного вращателя и т.д.
В системе В0Р предусмотрена возможность опознавания маяка. Для этого используют тональную модуляцию несущих колебаний частотой 1020 Гц, а сообщение передают кодом
Морзе. Используют также модуляцию речевым сообщением.
В настоящее время наибольшее распространение получили ВРМ VOR доплеровского типа (DVOR) и его разновидность - маяки повышенной точности их называют еще прецизионными (PDVOR). По принципу действия они одинаковы и аналогичны принципу действия наземных пеленгаторов доплеровского типа. На рис.52 представлена схема антенной системы фазового радиомаяка доплеровского типа.
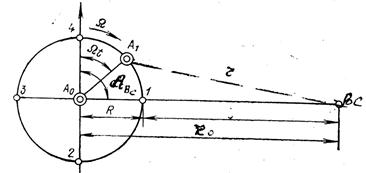
Рис. 52. Схема антенной системы доплеровского ВРМ
Она состоит из неподвижной центральной антенны А0 и подвижной антенны А1, которая вращается по окружности радиуса R c постоянной скоростью Ω. Если антенна А1 излучает сигнал е1 = Еm1·sinωt, то в точке приема на ВС этот сигнал будет иметь вид:
евс = Еm·sinω(t - tз),
где - tз = r/c - время запаздывания сигнала при прохождении им расстояния r между ВРМ и ВС.
При вращении антенны А1 расстояние r изменяется по закону
r = r0 - R· сos (Ωt - Авс),
где: R - радиус окружности вращения антенны А1;
Авс - азимут ВС;
Ω - угловая скорость вращения антенны А1 (Ω = 2πF).
Таким образом, принятый на ВС сигнал будет иметь переменную фазу и, как следствие, частоту, которая равна ω пр = dφ/dt.
Cигнал, принимаемый на ВС, окончательно будет иметь вид
евс = Em· sin {ωt - ω ·[r0 - R· cos (Ωt - Авс)]/с}.
Частота этого сигнала будет равна
ω пр = ω - (2π/ λ) ·Ω·R· sin (Ωt- Авс).
Таким образом, сигнал, принимаемый на ВС, представляет частотно-модулированное колебание, причем начальная фаза модуляции частоты равна азимуту ВС. Измеряя фазу модуляции можно определить азимут ВС. Поскольку изменение частоты сигналов, принимаемых на ВС, обусловлено доплеровским сдвигом, возникающим из-за движения антенны А1 относительно ВС, радиомаяки получили название доплеровских.
Неподвижная антенна А0 служит для излучения опорного сигнала частоты Ω, фаза которого не зависит от азимута ВС относительно маяка.
На борту ВС после приема и преобразования выделяются два сигнала: - опорный Uоп = Um· cos Ωt и “рабочий ” - Uр = Um·cos(Ωt- Авс). При Авс = 00 фазы этих сигналов равны, в любом другом направлении они будут различны. Таким образом, процесс измерения азимута на борту заключается в сравнении фаз двух сигналов - “рабочего” и опорного
Авс = φр - φоп.
В реальных маяках механическое вращение боковой антенны А1 заменяется последовательным подключением вибраторов, расположенных на окружности заданного радиуса R (рис.53). Радиус окружности R = 6,6м, количество вибраторов N = 39. Вибраторы работают попарно (1-21;2-22; …12-32;19-39).
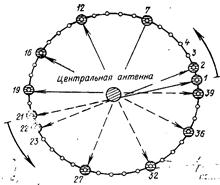
Рис. 53. Схема коммутации вибраторов антенны ВРМ
Прием сигналов РМ VOR на борту осуществляется навигационно-посадочным оборудованием систем "Курс-МП",VIM-95 или других типов, в котором имеется два независимых канала, позволяющих одновременно измерять МПС по двум РМ. Результаты измерения отображаются с помощью двухстрелочного радиомагнитного индикатора РМИ-2Б или индикаторов аналогичного типа.
В табл.8 приведены основные эксплуатационно-технические характеристики типовых ВРМ.
Таблица 8
| ВРМ | VOR | DVOR | PDVOR | DVOR -2000 | РМА-90 |
| Погрешность измерения азимута (2s), град | 3,6 (до 5) (20-РМ;30-БО) | 1…2 | 1…2 | ||
| Дальность действия, км: | |||||
| трассовые ВРМ при Нэш = 10000м | |||||
| аэродромные | |||||
| Число рабочих каналов |
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1722; Нарушение авторских прав?; Мы поможем в написании вашей работы!