КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Системи із саморганізацією
|
|
|
|
Це клас адаптивних систем, в яких в процесі функціонування змінюється структура пристрою керування. Сюди ж відносяться також системи із змінюваною структурою. Приклад структури такої системи наведено на рис.5.15. Пристрій адаптації ПА включає обчислюваний пристрій ОП та виконавчі реле ВР1...ВРN.
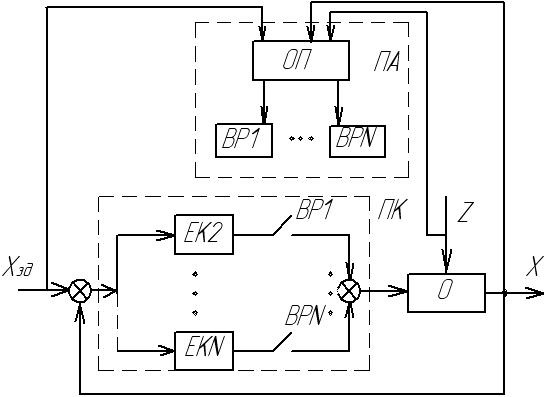
Рис.5.15 Структура адаптивної системи із самореалізацією
В залежності від умов функціонування об’єкта О (за сигналами Х, Хзд та Z) обчислювальний пристрій за допомогою контактів виконавчих реле ВР комутує схему підключення елементів корекції ЕК, які входять в основний пристрій керування ПК. Задача пристрою адаптації ПА полягає в стабілізації або оптимізації критерія якості керування шляхом вибору необхідного елемента корекції або комбінації кількох таких елементів. В структурі таких систем можуть використовуватись також випробувальні та пошукові сигнали. Крім того, можлива комбінація процедур самонастройки (змінювання параметрів) та самоорганізації (змінювання структури). В цьому випадку організується два рівні адаптації: перший – визначення структури, другий – настроювання параметрів. Такі системи мають широку область застосування щодо властивостей об’єкта та умов, в яких зберігаються необхідні показники процесу функціонування. Наприклад, при включенні в роботу або при змінюванні режиму система повинна забезпечити максимальну швидкодію, а після виходу на робочий режим – максимальну точність.
В останні роки суттєво розширились функціональні можливості систем керування, зокрема сучасні системи мають елементи самонавчання. Це значить, що впорядкованість та організованість системи в процесі функціонування зростають. В початкові моменти система може складатись з елементів, які зв’язані між собою довільним чином. В процесі функціонування на основі аналізу взаємодії з оточуючим середовищем в системі виникають стійкі зв’язки між елементами, утворюється необхідна структура. Це відноситься також до підсистем підтримки прийняття рішень, експертних систем, коли бази даних та значень постійно поповнюються і система самонавчається без участі людини.
[1, с.47-119, 2, с.502-535]
Контрольні запитання
1. Коли виникає необхідність застосування адаптивних систем?
2. Дайте визначення адаптивних систем.
3. Які задачі керування розв’язуються за допомогою адаптивних систем?
4. Як використовуються функції чутливості при створенні адаптивних систем?
5. За якими ознаками класифікуються адаптивні системи?
6. Наведіть загальну структуру адаптивної системи.
7. Наведіть структуру та поясніть принцип роботи адаптивної системи з еталонною моделлю.
8. Запишіть рівняння статики адаптивної системи з еталонною моделлю.
9. Як оцінюється похибка адаптації в системах з еталонними моделями?
10. Які методи використовуються при синтезі адаптивних систем з еталонними моделями?
11. Наведіть структуру адаптивної системи з ідентифікатором.
12. Наведіть формулу однокрокового алгоритма ідентифікації моделі об’єкта.
13. Які задачі розв’язуються в класі безпошукових адаптивних систем?
14. Дайте визначення екстремальної системи.
15. Наведіть приклади екстремальних статичних характеристик об’єкта.
16. За якими ознаками класифікуються екстремальні системи?
17. Наведіть основні методи та структури систем для пошуку екстремума.
18. Наведіть приклад перехідного процесу в екстремальній системі.
19. В чому особливість процесу пошуку екстремума для систем з інерційними елементами?
20. Наведіть приклад адаптивної системи із самоорганізацією.
Основна література
1. Ладанюк А.П. Теорія автоматичного керування: курс лекцій (частина друга) – К.: НУХТ, 2005 –115 с.
2. Попович М.Г., Ковальчук О.В. Теорія автоматичного керування: Підручник. – К.: Либідь, 1997. - 544 с.
Додаткова література
1. Автоматизація технологічних процесів і виробництв харчової промисловості: Підручник/ Ладанюк А.П.,Трегуб В.Г., Ельперін І.В., Цюцюра В.Д. – К.: Аграрна освіта, 2001 – 224 с.
2. Солодовников В.В., Плотников В.А., Яковлєв А.В. Основы теории и элементы систем автоматического регулирования. Учебное пособие для вузов. – М.: Машиностроение, 1985. – 536 с.
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 319; Нарушение авторских прав?; Мы поможем в написании вашей работы!