КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Спутниковые способы определения координат
|
|
|
|
4 октября 1957 г., в день запуска в СССР первого искусственного спутника Земли (ИСЗ), было положено начало стремительно развивающейся ветви геодезии — космической, или спутниковой. Эта новая ветвь геодезии нацелена прежде всего на решение двух групп задач — передачи координат на большие расстояния и измерения гравитационного поля Земли. В соответствии с этими задачами методы их решения также обычно делят на две группы: связанные с использованием спутника как цели-точки с известными координатами в определенные моменты времени наблюдений; основанные на исследовании траектории его полета, точного вида орбиты. Первую группу задач называют геометрической (космическая триангуляция, космическая линейная засечка), вторую — динамической (орбитальный метод). Естественно, абсолютной границы между задачами геометрического и динамического характера нет, так как они связаны едиными законами движения ИСЗ.
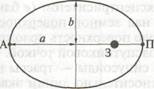
Рис. 40 Орбита ИСЗ
|
Невозмущенное движение ИСЗ происходит в общем случае поэлиптической орбите (Рис. 40)
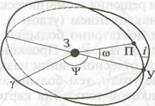
Рис. 41 Ориентация орбиты ИСЗ
|
Один из фокусов эллипса 3 — центр масс Земли; А — точка апогея, максимального удаления от Земли; П — точка перигея, ближайшая к Земле точка орбиты. Линия, соединяющая точки апогея и перигея, называется линией апсид.
Движение спутника происходит в неизменной плоскости орбиты, ориентация которой в пространстве определяется двумя угловыми величинами i и Ψ((рис. 41). i — наклон плоскости орбиты к плоскости экватора (если i = 0°, орбита экваториальная, если i = 90°, орбита полярная); угол Ψ — долгота восходящего узла. Линия ЗУ, по которой плоскость орбиты пересекает плоскость экватора, называется линией узлов. Углом ω (долгота перигея) определяется разворот или положение эллипса в плоскости орбиты. Для знания конкретного положения спутника должно быть еще известно время / прохождения, например, точки П. Всего, следовательно, нужно знать шесть параметров — шесть «кеплеровых элементов» (а, е, i, Ψ, ω, t).
Истинное движение спутника — возмущенное, не подчиняющееся строгим законам Кеплера. Измерение этих возмущений — путь к познанию реального гравитационного поля Земли. Именно орбитальные наблюдения позволили выявить асимметрию северного и южного земных полушарий: наземные гравиметрические измерения, хотя они и точнее спутниковых, в полярных районах практически не проводились.
В зависимости от вида задач — геометрических или динамических — параметры орбит спутников существенно различаются. Для изучения гравитационного поля Земли необходимы «низкие и тяжелые» спутники с высотой перигея 500 — 800 км. При меньших высотах на движение ИСЗ будет оказывать заметное влияние атмосфера Земли, при больших высотах ощутимо влияние светового давления и лунно-солнечного притяжения. Эти спутники должны, по возможности, иметь максимальное отношение массы к диаметру (форма ИСЗ, как правило, сферическая).
Для решения геометрических задач более удобны орбиты с большим наклонением (углом i), малым эксцентриситетом (е близко к 0) и достаточно большой высотой над земной поверхностью (от 3 до 30 тыс. км). Проекция на земную поверхность положения ИСЗ по отвесной линии называется подспутниковой точкой. Чем больше угол i, тем больше амплитуда синусоиды — трассы подспутниковой точки (на карте мира относительно линии экватора), тем лучше условия для наблюдения спутника в высоких широтах. Чем меньше угол i, тем меньше амплитуда, тем ближе трасса к экватору.
Среди спутников с экваториальной круговой орбитой (i = 0°, е = 0) особенно важен для геодезии тот, высота которого имеет некоторое определенное значение. Известно, что период обращения ИСЗ может быть вычислен по формуле
Тмин = 84,4 + Н/25,
где Тми н - период обращения ИСЗ, мин; Н - высота ИСЗ над земной поверхностью, км.
При Н = 33 900 км период обращения спутника равен 24 ч, таким образом, его трасса на карте Земли превращается в точку, он как бы зависает над определенным пунктом экватора. Такие ИСЗ называют геостационарными спутниками.
В связи с огромной скоростью движения ИСЗ (около 7 км/с) определение их пространственного положения выполняется приемами, несколько отличными от обычных геодезических измерений. Наибольшее распространение получили два способа — фотографический и радиотехнический.
Спутниковые системы существуют более трети века. Долгое время они обеспечивали навигационной информацией самолеты, морские суда и подводные лодки. Однако достигнутый с помощью таких систем высокий уровень точности определения местоположения объектов привел к широкому использованию космических навигационных систем в различных областях человеческой деятельности. Поэтому глобальные космические навигационные системы в большинстве случаев стали называть навигационно-геодезическими (универсальными).
Универсальность означает возможность использования аппаратуры как в геодезических, так и в навигационных целях; на суше, море, в воздухе и ближнем космическом пространстве; динамическими и статическими пользователями; для определения абсолютного и относительного положения объекта. Возросшие возможности этих систем позволяют наряду с решением задач нахождения геоцентрических координат пунктов на уровне точности около 1 м определять относительные координаты на уровне точности, близкой к 1 • 10~7.
В настоящее время применяют две системы второго поколения — американская GPS и российская ГЛОНАСС, намечается введение в эксплуатацию европейской системы под названиемGalileo.
Американский генерал X. Стехлинг предложил термин, отражающий универсальное назначение системы - позиционирование. Ему соответствует название американской спутниковой системы: Global Роsitioning Sistem - GPS. Под позиционированием понимается реализация возможных способов использования системы для определения параметров пространственного состояния
объектов наблюдения. Такими параметрами могут быть координаты приемника, вектора скорости его перемещения, пространственный вектор между двумя приемниками, точное время позиционирования. Следовательно, определение местоположения объекта, скорости его перемещения, пространственного вектора между пунктами наблюдения, фиксация точного времени представляют собой частные случаи позиционирования. Спутниковые системы GPS и ГЛОНАСС обеспечивают позиционирование в любой точке земной поверхности, в любое время суток, в любую погоду.
Российская система получила название ГЛОНАСС - Глобальная навигационная спутниковая система и в соответствии с российским стандартом ГОСТ Р 51794-2001 именуется ГСП - Глобальная система позиционирования.
Система GPS полностью развернута в 1995 г., система ГЛОНАСС — в 1996 г. Однако вскоре в системе ГЛОНАСС прекратилось планомерное восстановление ИСЗ, и она до сих пор остается недоукомплектованная ими.
Техническими предпосылками создания таких систем явились высокая надежность спутников и создание сверхстабильных атомных эталонов времени. GPS действует в координатной системе WGS-84, а ГЛОНАСС работает в системе ПЗ-90.
Структура систем ГЛОНАСС и GPS. В состав каждой из систем входят три подсистемы (сегмента):
• подсистема космических аппаратов (КА) и стартовые комп-
лексы;
• подсистема наземного контроля и управления (НКУ);
. подсистема приемной аппаратуры потребителей (АП).
Каждая из подсистем GPS и ГЛОНАСС включает группировку
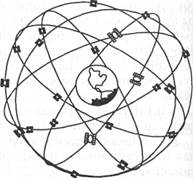
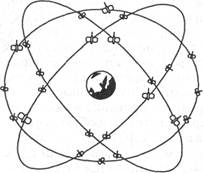
из 24 КА. Спутники ОРЗ распределены в шести, а спутники ГЛОНАСС в трех орбитальных плоскостях, развернутых соответствен-то через 60° и через 120° по долготе восходящего узла (рис. 42).
Орбиты расположены так, что в любое время над любой точкой земной поверхности видно «созвездие» не менее чем из четырех КА. На каждом спутнике имеются: четыре дорогостоящих атомных эталона частоты и времени, обеспечивающие генерацию радиосигналов и меток шкал времени, средства для приема и передачи радиосигналов и др. Со спутника передаются эфемериды ИСЗ и альманах всех ИСЗ системы и другие сведения.
Эфемеридами называют данные, характеризующие орбиту ИСЗ и некотором относительно коротком интервале времени, позволяющие с высокой точностью вычислить местоположение спутника на момент измерений в общеземной геоцентрической системе координат WGS-84 или СК-90. Альманах - сборник данных о всех спутниках GPS - содержит сведения о местоположениях спутников, времени их восхода и захода, их высотах над горизонтом и азимутах, используется для планирования измерений.
|
|
Рис. 42 Орбитальная группировка спутников глобальных систем
позиционирования: а - ГЛОНАСС; б - GPS
Подсистема НКУ состоит из станций: слежения за КА, собирающих информацию об орбитах спутников; службы точного времени; главной станции с вычислительным центром, обрабатывающим орбитальную информацию и прогнозирующим координаты (эфемериды) спутников; станций загрузки данных на борт КА. Космические аппараты принимают и хранят информацию с наземных станций, а также непрерывно распространяют ее среди потребителей радиосигналами в составе навигационных сообщений.
Подсистема потребителя GPS включает совокупность аппаратно-программных средств, реализующих возможные способы использования системы — определение навигационных данных на суше, поверхности моря, в воздухе, околоземном пространстве и | геодезических положений на поверхности Земли.
Для обеспечения возможности определения координат в любом месте Земли и в любой момент времени число спутников приходилось увеличивать, что привело к появлению их «созвездий», или систем (рис. 42). В России разрабатывается система ГЛОНАСС (глобальная навигационная спутниковая система), в США в конце 1970-х гг. разработана «Глобальная система местоопределения» - GPS.
Система GPS состоит из 24 спутников, относительно равномерно распределенных над поверхностью Земли (на круговых орбитах высотой около 22 тыс. км), и нескольких наземных станций-обсерваторий, с которых ведется непрерывное их наблюдение. Траектория орбиты каждого спутника, таким образом, непрерывно уточняется и передается на соответствующий спутник-носитель, который в свою очередь эту информацию ретранслирует в виде так называемого альманаха. На каждом спутнике располагается генератор псевдослучайных колебаний (используются две частоты: 1 575,42 МГц и 1 227,60 МГц) и в целях максимальной надежности по несколько экземпляров сверхпрецизионных атомных часов. На Земле в определяемой точке располагается спутниковый приемоиндикатор, в котором генерируются точно такие же псевдослучайные кодированные сигналы, причем строго синхронно с излучением со спутника. Сравнение двух колебаний позволяет определить время прохождения сигнала от спутника до приемника (с точностью до 10~9 с), а следовательно, и вычислить расстояние между ними. Знание мгновенных

|
значений расстояний от данной точки до четырех спутников, координаты которых известны, позволяет вычислить координаты нахождения приемоиндикатора.
| Рис. 42Расположение спуников в системах местоопределения |
Заметное повышение точности при спутниковых определениях координат достигается одновременным применением двух при-емоиндикаторов - базового, или станционного, находящегося постоянно в одном пункте с известными координатами, и подвижного, перемещающегося по определяемым точкам. Информация, записанная на обоих приемоиндикаторах, затем обрабатывается на компьютере с помощью специальной программы, что обеспечивает сантиметровую и даже миллиметровую точность определения координат.
Терминология методики спутниковых измерений в настоящее время формируется в русском языке в основном на основе проспектов иностранных фирм — производителей измерительного оборудования. Если подвижная станция на определяемой точке функционирует не менее часа, такой метод работы называют «статическим»; если продолжительность наблюдений составляет от 5 до 15 мин, — это метод «быстрой статики»; если сеанс наблюдений еще короче, — метод «кинематики»; если регистрация измеренных данных осуществляется безостановочно, — метод «непрерывной кинематики»; если сеансы наблюдений по несколько минут повторяются через несколько часов, — метод «реоккупации» и т. п. Каждая фирма указывает свои величины продолжительности наблюдений для каждого метода. Глобальным системам местоопределения, безусловно, принадлежит большое будущее.
Сущность местоопределения. В основе определения координат спутникового приемника лежит метод линейных засечек, или три-латерации (рис. 43). Роль опорных пунктов выполняют КА, координаты которых должны быть известны в любой момент времени. При помощи аппаратуры, расположенной на спутниках и на поверхности Земли, измеряют расстояния и скорости изменения КА вследствие перемещений их относительно потребителя. В геодезических целях преимущественно пользуются расстояниями. Если от спутникового приемника известны расстояния до трех КА, то в результате пересечения трех сфер, которым соответствуют расстояния, получатся две точки. Этого достаточно для однозначного определения координат, так как из двух возможных точек расположения приемника лишь одна находится на поверхности Земли (или в непосредственной близости от нее), а вторая, ложная, — либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Такие искаженные расстояния называют псевдодальностями, а для нахождения верных расстояний и определения трехмерных координат GPS-приемника используют, как минимум, четыре (или более) спутника. Получив сигнал от спутников, GPS-приемник ищет точку пересечения соответствующих сфер. Если такой точки нет, процессор GPS-приемника начинает методом последовательных приближений корректировать свои часы до тех пор, пока не добьется пересечения всех сфер в одной точке.
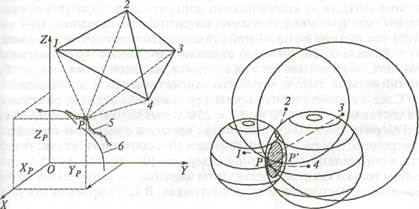
Рис43. Концепция определения положения объекта методом ОР5:
а — синхронное определение псевдодальностей от приемника ОР5 до спутников; б — геометрическая интерпретация определения положения объекта по четырем дальностям от него до спутников ОР5; 1— 4 — космический аппарат «GPS»; 5 — земная поверхность; 6 — общеземной эллипсоид; О — центр масс Земли — начало прямоугольной геоцентрической системы координат; Р — приемник на определяемом пункте
ХР, YР, ZР - искомые координаты приемника; XI,, УI, ZI (I= 1, 2, 3, 4) -координаты спутников в пространственной системе координат, отнесенные к определенному моменту времени.
Расстояния до спутников определяют как произведение времени прохождения от них радиосигналами пути до приемника на известную скорость электромагнитных колебаний. Время получают косвенным путем, используя специальные коды или фазовые измерения..
Спутник передает свою последовательность в виде непрерывного радиосигнала, а GPS-приемник, будучи включенным в произвольный момент времени, принимает ее и находит величину задержки дальномерного сигнала относительно своей опорной последовательности импульсов (рис. 43). Для этого ПСП на спутнике и в приемнике пользователя генерируют строго синхронно. Тогда приходящая от спутника кодовая последовательность будет запаздывать по отношению к такой же последовательности в аппаратуре наземной станции на время r = t2- t1, равное распростра нению сигнала от космического аппарата до аппаратуры пользователя, где t1 - момент излучения сигнала на спутнике, t2 - момент его приема на наземной станции. Поэтому время прохождения сигнала от спутника до станции определяют путем задержки сигнала, вырабатываемого на спутнике, на такое время t1 - t2, чтобы принимаемый сигнал успел его «догнать» и оба они совпали.
Следует отметить, что время прохождения сигнала со спутника составляет около 70 мс (Т = 20000 км/300000 км/с = 0,066 с), а измерить такой малый интервал времени с высокой точностью (погрешность в расстоянии порядка 10м соответствует погрешности в определении временной задержки 10/300000 = 3-10~8 с) способны только квантовые стандарты частоты, так называемые «атомные» часы, располагаемые на спутниках. В GPS-приемниках устанавливают менее дорогие и менее точные кварцевые генераторы, а возникающие из-за этого ошибки синхронизации часов устраняют методом определения расстояния до четвертого спутника и математической обработкой данных измерений.
В аппаратуре потребителя (GPS-приемнике) производится поиск, усиление и разделение сигналов, принадлежащих разным космическим аппаратам, определение временных задержек распространения сигналов от спутников и таким образом вычисление псевдодальностей до них.
Комплект аппаратуры потребителя зависит от его назначения. Чем точнее работы, тем сложнее аппаратура. Наиболее совершенные приемные системы применяют в геодезических целях. Комплект аппаратуры пользователя для геодезических целей включает антенну, приемник, контроллер (управляющее устройство), аккумуляторы или батареи, блок питания (для зарядки аккумуляторов и работы от сети), кабели, штативы, вешку для установки антенны, рулетку или специальное приспособление для измерения высоты антенны и прочее оснащение. Для обработки измерений обязателен персональный компьютер с программным обеспечением.
Приемники классифицируют по конструктивным особенностям, назначению и некоторым другим признакам. Так, по видам принимаемых сигналов приемники делят на кодовые и фазовые; по техническим возможностям — на односистемные (принимающие сигналы от одной системы GPS или ГЛОНАСС) или двухсистемные, ориентированные на прием сигналов как от GPS, так и от ГЛОНАСС; по назначению — для навигационных, военных, геодезических и других целей. Применяются приемники, совмещенные с электронными тахеометрами.
|
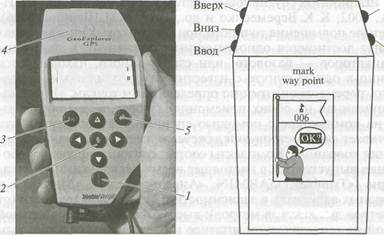
1 — кнопка питания; 2 —- клавиша команд; 3 — клавиша возврата на предыдущую команду; 4 — плоская антенна; 5 — клавиша ввода координат путевой точки при решении навигационных задач; клавиши со стрелками — управление курсором
В некоторых их конструкциях информация об ожидаемой точности местоопределения указывается не в числовых значениях РВОР (баллах), а непосредственно в единицах длины. На дисплеях помещается не только цифровая информация, но и графическая -упрощенная схема местности, трасса движения (в плане и по высоте), звездная карта с расположением спутников и т.п.
Какой бы приемоиндикатор - выпуска 1990-х гг. или сверхсовременный - ни применять, нельзя забывать о предварительной установке трех исходных параметров. Из ветвей первой следует выбрать нужную систему координат, второй - эллипсоид, третьей - метрическую или футовую систему единиц длин. Если выбор единиц измерений осуществляется одним нажатием клавиши, то с выбором систем координат и эллипсоида дело обстоит значительно сложнее. Все современные приемоиндикаторы зарубежных фирм в программном обеспечении не имеют систем прямоугольных координат и моделей Земли, принятых в России. Поэтому российские геодезисты обычно используют прямоугольную систему координат WТМ и модель Земли WGS-84 с последующим пересчетом.
Максимальные точности измерения координат спутниковыми методами, а это в настоящее время величины около 5 -10 мм, возможны только в режиме GPS.
Рис. 5.25. Двухчастотный спутниковый приемоиндикатор

|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 8592; Нарушение авторских прав?; Мы поможем в написании вашей работы!