КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Аппроксимация переходной функции решением дифференциального уравнения для системы без запаздывания
|
|
|
|
Графические методы построения динамических моделей.
При нанесении на вход объекта единичного скачкообразного возмущающего воздействия X(t)=1 получают график переходной функции Y(t) (рис. 5).
Передаточная функция объекта, представляющего собой, например, апериодическое звено I-го порядка, имеет вид:
W(P)=k/(T*P+1) (4.1.)
где T – постоянная времени объекта;
k=y( ) - коэффициент усиления;
) - коэффициент усиления;
 y() - установившееся значение выходной величины.
y() - установившееся значение выходной величины.
Этой передаточной функции соответствует дифференциальное уравнение:
T*  +y(t)=k*x(t) (4.2.)
+y(t)=k*x(t) (4.2.)
решение которого может быть записано в виде
y(t)=k*x(t)*(1-e ) (4.3.)
) (4.3.)
Постоянная времени Т определяется из графика переходного процесса. Для этого надо провести касательную к кривой y(t) в начале координат; отрезок по оси времени от нуля до точки пересечения касательной и линии y=y( ) равен Т.
) равен Т.
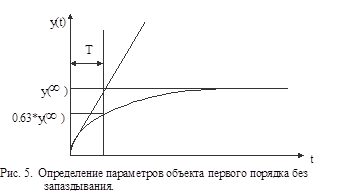
Постоянную времени Т можно определить также, учитывая, что y(T)=0.63*y(). Для этого по графику переходного процесса находят значение t=T, при котором y(t)=0.63*y( ).
).
Аппроксимация переходной функции решением дифференциального уравнения для системы с запаздыванием.
Аппроксимирующая передаточная функция для системы первого порядка с запаздыванием имеет вид:
W(P)= (4.4.)
(4.4.)
а решение линейного дифференциального уравнения первого порядка с запаздыванием будет
y(t)=0; 0 (4.5.)
(4.5.)
y(t)=k*x(t)*(1- ); t
); t
где Т - постоянная времени;
 - время запаздывания;
- время запаздывания;
К - коэффициент усиления.
Интерполяционный метод определения параметров Т и  заключается в следующем. На нормированной кривой переходного процесса, у которой по оси ординат откладывают величину y(T)/y(), выбирают две точки А и В (рис. 6.)
заключается в следующем. На нормированной кривой переходного процесса, у которой по оси ординат откладывают величину y(T)/y(), выбирают две точки А и В (рис. 6.)
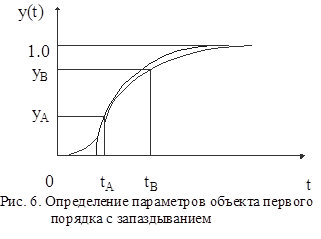
Желательно, чтобы точка А была расположена вблизи точки перегиба кривой, а ордината y(А) равнялась 0.8-0.9. Рассматривая точки А и В как интерполяционные узлы кривой, можно определить параметрами переходной функции:
 (4.6.)
(4.6.)
 (4.7.)
(4.7.)
Другой способ аппроксимации переходной функции, являющийся развитием метода Орманна, заключается в следующем. По нормированной кривой y(t) определяется время t 7 являющееся корнем уравнения
k*x(t)*(1- )=0.7
)=0.7
и время t , удовлетворяющее равенству y(t
, удовлетворяющее равенству y(t )=0.33.
)=0.33.
Далее вычисляются время запаздывания :
 (4.8.)
(4.8.)
и постоянная времени Т:
 (4.9.)
(4.9.)
Для проверки полученных результатов сравнивают ординаты заданной переходной функции при t ,
, 
 с соответствующими значениями ординат аппроксимирующей кривой: h4 = 0,33; h8 = 0,55 и h20 = 0,87
с соответствующими значениями ординат аппроксимирующей кривой: h4 = 0,33; h8 = 0,55 и h20 = 0,87
Аппроксимация переходной функции решением дифференциального уравнения второго порядка.
Передаточная функция для объекта второго порядка записывается в виде
 (4.10)
(4.10)
Переходная функция объекта может быть аппроксимирована решением линейного дифференциального уравнения второго порядка:
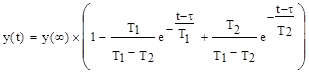 (4.11)
(4.11)
Так как время чистого запаздывания t и коэффициент усиления K определяются известными приемами по переходной функции, то далее будем рассматривать только нахождение постоянных времени T 1 и T 2.
Один из способов определения связан с графическими построениями. Исходная переходная функция нормируется путем деления ординат на величину 
y(t)=y*(t)/y(Tуст) (4.12)
 - нормированная функция;
- нормированная функция;
 - исходная функция;
- исходная функция;
Туст - время, при котором устанавливается постоянное значение .
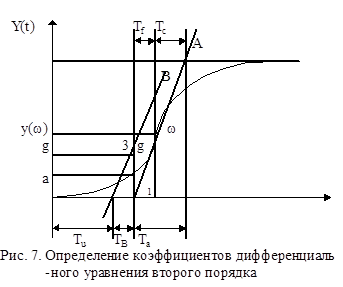
На графике y(t) определяется точка перегиба w, через которую проводится касательная до пересечения с осью абсцисс и горизонтальной прямой y(Tуст)» K (рис. 7).
Точка перегиба кривой y(t) представляет собой точку, в которой производная dy(t)/dt имеет максимальное значение. Так как переходные функции реальных объектов часто не имеют явно выраженной точки перегиба, то определение ее координат можно осуществлять следующим образом.
В средней, наиболее быстро изменяющейся части графика y(t) берется несколько ординат y(tg) = yg g = 0, 1, 2,..., q; q обычно не более 6-7; tg - tg-1 = Dt=const и вычисляются первые разности  g = 0, 1, 2,..., q-1. Далее находится максимальная величина Dyg и соответствующее ей значение времени tw= tg - 0,5*Dt, а затем ордината yw.
g = 0, 1, 2,..., q-1. Далее находится максимальная величина Dyg и соответствующее ей значение времени tw= tg - 0,5*Dt, а затем ордината yw.
Из графика y(t) непосредственно находятся значения T1, T2 и а. Затем из точки I пересечения касательной А с осью абсцисс восстанавливается перпендикуляр высотой g
 (4.13)
(4.13)
Через точку 3 проводится прямая линия B, паралелльная касательной A, и находится время Tв. Предположив, что T2 < T1, вычисляют их значения из эмпирических соотношений
 (4.14)
(4.14)
при a <= 0,05
 (4.15)
(4.15)
T1= T 0 - Tв при a > 0,005
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1123; Нарушение авторских прав?; Мы поможем в написании вашей работы!