КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЛЕКЦИЯ 6. Эта система решается методом Гаусса
|
|
|
|
B A x
Эта система решается методом Гаусса.
§2.8 Учет трения при определении реакций в кинематических парах.
Трение является сложным физико-химическим процессом, сопровождающийся выделением тепла. Это вызвано тем, что перемещающиеся тела оказывают сопротивление относительному движению. Мерой интенсивности сопротивления относительному перемещению является сила (момент) трения.
Различают трение качения, трение скольжения, а также сухое, граничное и жидкостное трение.
Если суммарная высота микронеровностей взаимодействующих поверхностей:
· больше, чем высота слоя смазки, то - сухое трение.
· равна высоте слоя смазки, то - граничное трение.
· меньше, чем высота слоя смазки, то - жидкостное.
2.8.1 Учет трения в поступательной кинематической паре.
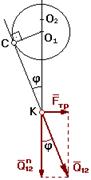
 Без учета трения реакция направлена по нормали к взаимодействующим поверхностям. При учете трения результирующая реакция Q21 отклоняется от общей нормали на угол трения j в сторону противоположную направлению движения.
Без учета трения реакция направлена по нормали к взаимодействующим поверхностям. При учете трения результирующая реакция Q21 отклоняется от общей нормали на угол трения j в сторону противоположную направлению движения.
без учета трения с учетом трения

 Fтр=Qn 12. tg j
Fтр=Qn 12. tg j
tg j= f
Fтр=Qn 12. f
Коэффициент трения f определяется экспериментально и зависит от многих факторов.
2.8.2 Учет трения во вращательной кинематической паре.
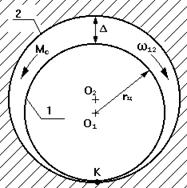
1 - цапфа
rц - радиус цапфы
Δ - зазор
r - радус круга трения;
r = О1С
Из Δ О1СК à = sin j à О1С = О1К sin j
= sin j à О1С = О1К sin j
Mc= Q12 . О1С = Q12 . rц . sin j
При малых углах j sin j ≈ tg j = f. Тогда:
Mc= Q12 . rц . f
При учете трения во вращательной КП результирующая реакция отклоняется от общей нормали на угол трения j и проходит касательно к кругу трения радиуса r
2.8.3 Краткие сведения по определению КПД (h) машинного агрегата.
 КПД машинного агрегата равен отношению работы сил полезного сопротивления к работе движущих сил за цикл установившегося режима.
КПД машинного агрегата равен отношению работы сил полезного сопротивления к работе движущих сил за цикл установившегося режима.
 |
а) определение КПД при последовательном соединении механизмов.
Pвход = Рд
б) определение КПД при параллельном соединении механизмов.
 |
где bi – коэффициенты распределения мощности.
b1 + b2 + b3 +… + bm = 1
Каждый b определяется назначением специалиста.
Глава3. Основные сведения о виброзащите машинного агрегата.
Вибрации нашли полезные применения в технике. Примерами этого являются различные вибромассажеры, вибротранспортеры и т.д. Однако работа с инструментом, основанном на вибрации, приводит к профессиональным травмам и заболеваниям. Основные мероприятия, связанные с выявлением источника вибрации, с целью последующего снижения его виброактивности или полного его устранения, называют виброзащитой.
Виброзащита осуществляется по следующим основным направлениям:
1. Уменьшение активности источника с помощью статического уравновешивания механизмов (полного или частичного), а также уравновешивания роторов.
2. Изменение конструкции объекта: установка гасителей колебаний, демпферов, виброизоляторов.
§3.1 Статическое уравновешивание рычажных механизмов.
 Если
Если  , то такой механизм называется статически уравновешенным.
, то такой механизм называется статически уравновешенным.
Если  , то такой механизм называется моментно-уравновешенным.
, то такой механизм называется моментно-уравновешенным.
Рассмотрим случай, когда необходимо уравновесить статически,
т.е. . Этого можно добиться только тогда, когда  , т.к.
, т.к.
 S à A
S à A
Когда центр масс совмещен с А, то он становиться неподвижным. Этого добиваются с помощью двух противовесов, один из которых устанавливается на продолжении шатуна, а другой на продолжении кривошипа.
Для того чтобы рассчитать массы противовесов, применяют метод замещающих масс, суть которого заключается в том, что масса каждого звена условно разноситься по двум точкам. При этом должны выполняться следующие условия:
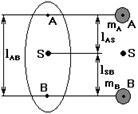 разнесем массу этого звена по точкам А и В так, чтобы положение центра масс не изменилось.
разнесем массу этого звена по точкам А и В так, чтобы положение центра масс не изменилось.
m = mA + mB
lAB = lAS + lBS
mA lAS = mB lBS
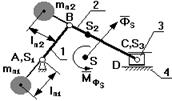
Сосредоточим массу 3-го звена в т.С
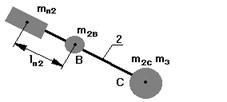 Массу 2-го звена разнесем по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mпр2 и на расстоянии от т.В равное lпр2, то центр масс звеньев 2 и 3 переместиться в т.В, при этом
Массу 2-го звена разнесем по шарнирам В и С. Если на продолжении звена 2 поставить противовес массой mпр2 и на расстоянии от т.В равное lпр2, то центр масс звеньев 2 и 3 переместиться в т.В, при этом
mпр2 . lпр2 = (m2C + m3C) . lBC
При этом либо задаются массой противовеса и определяют lпр2, либо задаются lпр2 и определяют массу противовеса.
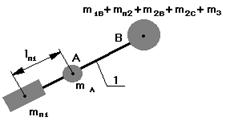
mпр1 . lпр1 = (m1B + mпр2+ m2В+ m2C+ m3C) . lAB
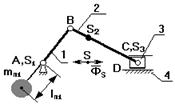 |
После всех указанных мероприятий, центр масс переместиться в точку А, однако невсегда конструктивно возможно установить противовес на продолжении шатуна и ограничиваются установкой противовеса на звене 1. В этом случае центр масс системы смещают на линию АС, и этот центр масс перемещается с постоянным ускорением: а = const
В этом случае механизм – частично статически уравновешанный, его нежелательно устанавливать на высоком фундаменте, т.к. главный вектор сил инерции создает опрокидывающий момент, что недопустимо.
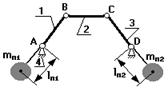 В четырехшарнирном механизме центр масс системы разноситься по точкам А и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
В четырехшарнирном механизме центр масс системы разноситься по точкам А и D, а противовесы устанавливаются на продолжении звеньев 1 и 3.
§3.2 Балансировка ротора (лаб. раб. №9).
Ротор – тело любой геометрической формы, имеющее свое основное движение – движение вращения (коленвал, колесо турбины и т.д.).
Пусть в силу каких-либо причин центр масс ротора смещен от оси вращения О на постоянную величину е.
1. w=0 à на опоры действует только сила тяжести G=mg.
2. w=соnst
 1) 2)
1) 2)
 Если заменить воздействие опоры реакцией и записать условие статического равновесия (по Даламберу):
Если заменить воздействие опоры реакцией и записать условие статического равновесия (по Даламберу):
Из рассмотрения данного треугольника следует, что при вращении ротора на его опоре возникает знакопеременная нагрузка Q12, которая достигает максимума, когда ФS и G направлены вниз, и минимума, когда эти вектора направлены по вертикали в разные стороны.
Состояние ротора, характеризующегося таким распределением масс, при котором на его опорах возникает знакопеременная нагрузка, называется неуравновешанностью ротора.
Причины вызывающие неуравновешанность ротора:
1. неточность изготовления ротора;
2. неточность сборки;
3. различные включения при отливке частей ротора;
4. перепады температур.
Мерой неуравновешенностью ротора является дисбаланс ( ) – вектор, направленный по ФS и отличающийся от него в w2 раз:
) – вектор, направленный по ФS и отличающийся от него в w2 раз:
 ,[г.мм]
,[г.мм]
Для того чтобы определить величину и направление D, в рассмотрение вводят плоскость дисбаланса, в которой этот вектор расположен, и угол дисбаланса.
Мероприятие, связанное с определением величины и направления D, с целью его последующего уменьшения, называется уравновешиванием ротора.
Существуют 3 вида неуравновешанности:
1. статическая;
2. моментная;
3. динамическая (общий случай).
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 231; Нарушение авторских прав?; Мы поможем в написании вашей работы!
