КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Однопозиционные РТК
|
|
|
|
Виды РТК с одним промышленным роботом и их компоновки
В зависимости от числа станков, обслуживаемых одним ПР, различают одностаночные и многостаночные РТК.
В состав любого РТК входят устройства управления как отдельным ПР, так и всем РТК. Число устройств управления, как правило, равно числу станков и других технологических машин (в том числе и ПР), входящих в состав РТК. В ряде случаев управление РТК осуществляется системой управления ПР.
При выборе захвата ПР необходимо учитывать: размеры заготовок и номенклатуру деталей, допускаемую захватами нецентричность, возможный угол захвата.
Тактовый стол подбирается исходя из габаритов, массы и потребного количества заготовок. При выборе способа установки заготовок на тактовом столе (ТС) на палете, необходимо учитывать зону работы ПР, точность его позиционирования, размеры и компоновку захвата. Готовую деталь можно ставить на ТС или в предусмотренную для этого отдельную тару. Спутники разрабатываются применительно к конкретным деталям сложной геометрии.
При обработке некоторых деталей выявляется необходимость применения стола для кантования детали или для перебазирования в захватах, который должен находиться в зоне действия ПР.
Однопозиционные РТК на базе токарных станков мод.16К20Ф3, Т5К20РФЗ или 16К20Т1 (рис. 5.16.) 0предназначены для токарной обработки деталей типа тел вращения из штучных заготовок в автоматическом режиме в мелкосерийном и серийном производстве с повторяющимися партиями деталей.
В цикле работы РТК заготовки автоматически поочередно подаются роботом на станок. Обработанные детали передаются роботом со станка на свободные палеты тактового стола.
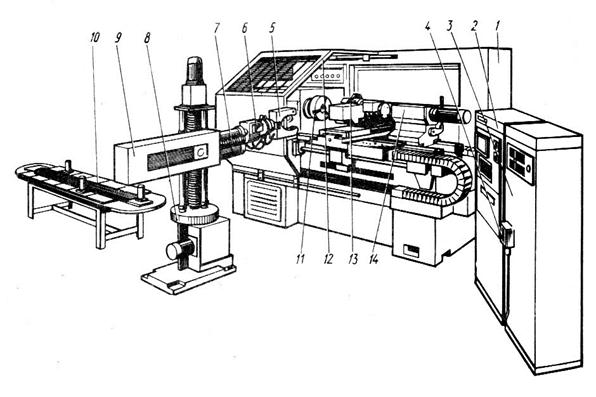
Рис. 5.16.. РТК 16К20ФЗ.Рс роботом М20П.40.01
Программа обработки конкретной детали вводится в УЧПУ с клавиатуры, перфоленты, магнитной кассеты и другими способами.
Программа перемещений робота для установки и снятия конкретной детали вводится УЧПУ робота в режиме обучения и может находиться в памяти УЧПУ робота. Кроме этого система управления робота выполняет функции управления всем РТК т.е. включает токарный станок для работы по программе, автоматический патрон станка, ограждение станка и тактовый стол.
ПР выполняет операции загрузки и разгрузки станка, а также дает команды на пуск станка 1, управление зажимным патроном 11, подвижным ограждением рабочей зоны 12, тактовым столом 10.
ПР имеет пять программируемых перемещений: вертикально - Z (вверх и вниз) каретки 9, ее поворот в горизонтальной плоскости, горизонтальное перемещение штока 7, угловое положение поворотного блока 6.
Установка и съем обрабатываемой детали в патрон станка в данном РТК осуществляется путем поворота робота устройством 8. Так как расстояние между осью поворота ПР и патроном достаточно большое, подпружиненный схват компенсирует погрешности поворотного вместо поступательного движения загружаемой детали в патрон.
Тактовый стол (ТС) (рис. 5.17) комплекса предназначен для транспортирования деталей в зону захвата ПР.
Тактовый стол может работать в трех режимах:
· ручного управления;
· автоматического управления;
· режима непрерывного вращения.
При работе тактового стола в автоматическом режиме команды управления поступают от системы ЧПУ робота. При этом может осуществляться
шаговое и непрерывное перемещение паллет.
Применение тактового стола (ТС) необязательно. Можно, используя УЧПУ робота, запрограммировать съем и укладку обрабатываемых деталей на стационарном столе – режим палетирования деталей. Это достигается благодари
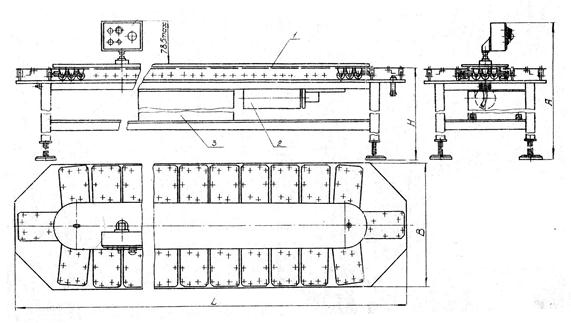
Рис. 5.17. Общий вид тактового стола
1 – паллеты; 2 – электропривод с редуктором; 3 – электрошкаф
возможности программирования ПР по вертикали (устройство 9) и по углу (устройство 8). Применение ТС или стационарного стола зависит от конкретных производственных условий. В первом случае требуется больше производственной, площади, в другом — программа работы ПР.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1024; Нарушение авторских прав?; Мы поможем в написании вашей работы!