КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Параметрический синтез САУ по методу ЛЧХ
|
|
|
|
Лекция 28
Синтез линейных САУ по методу ЛЧХ
Рассмотрим метод ЛЧХ, который опирается на частотные методы оценки установившегося и переходного режимов. Его называют: формирование частотных характеристик или ПФ (Loop Shaping) разомкнутой системы Поэтому с помощью этого метода удобно синтезировать управляющие устройства, позволяющие построить систему, удовлетворяющую требованиям, касающимся ее частотных свойств.
Данный метод является классическим. При его использовании применяется следующая терминология.
Замкнутая система, включающая только ОУ, охваченный ОС, называется нескорректированной системой (НС), параметры которой не подлежат изменению.Такая система не позволяет добиться желаемой цели. В структуру НС вводят изменения с целью улучшения ее динамических и статических свойств, как говорят, осуществляют коррекцию системы.
Корректирующее устройство – устройство с легко изменяемыми параметрами, специально вводимое в систему для улучшения статических и динамических свойств.
Коррекция – формирование закона управления за счет корректирующего устройства.
Система с корректирующим устройством называется скорректированной системой или проектируемой системой.
Различают две задачи синтеза:
1) Синтез корректирующего устройства
Задача: выбрать вид и параметры корректирующего устройства, чтобы скорректированная система удовлетворяла требованиям, т.е. выбрать форму и параметры закона управления.
1) Выбор параметров корректирующего устройства
Вид ПФ корректирующего устройства известен, а коэффициенты числителя и знаменателя ПФ неизвестны.
Задача: выбор параметров корректирующего устройства (настройка), исходя их заданных требований.
Исходные данные:
1. ПФ разомкнутой нескорректированной системы (разом. НС)
 (1)
(1)
можно рассматривать как ПФ расширенного ОУ. Зная W1(p), нетрудно построить ЛЧХ НС разомкнутой системы..

2. Допустимый закон управления имеет вид:
u (p)=W2(p)ε(p), (2)
где u(p) – изображение управляющего воздействия, ε(р) – изображение ошибки, т.е.
ε(p)=v(p)-y(p), (3)
W2(p)=u(p)/ε(p) есть ПФ корректирующего устройства. Здесь v(p) – изображение задающего воздействия.
Используя (1), (2), (3), построим структурную схему проектируемой системы:
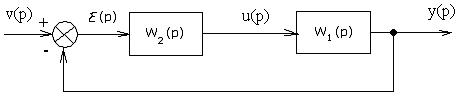
Как видим, допустимый закон управления представляет собой закон управления по ошибке. Возмущения (возмущающее воздействие, шум измерения, неточность модели ОУ) учитываются косвенно при выборе W2(p). Мы можем найти ПФ разомкнутой скорректированной системы:
 . (4)
. (4)
Здесь k и ν соответствуют коэффициенту усиления и порядку астатизма скорректированной системы.
Если W2(p)=1, то W(p)= W1(p).
Пусть W2(p) задана, но все ее параметры неизвестны, т.е. W2(p,q1…ql).
Задавшись параметрами q1…ql, можно построить ЛЧХ корректирующего устройства

Из выражения (4), связывающего W(p), W1(p), W2(p), следует
 (5)
(5)
где

Применяя частотные методы оценки, надо подобрать параметры КУ, чтобы скорректированная система удовлетворяла требованиям.
Требования, предъявляемые к качеству проектируемой системы:
а) точность воспроизведения задающего воздействия
 - допустимая установившаяся ошибка.
- допустимая установившаяся ошибка.
Исходя из  , определяют или задают нижние границы коэффициента усиления k* и порядка астатизма ν*. При этом требования точности применительно к коэффициенту усиления и порядку астатизма проектируемой системы можно записать в виде:
, определяют или задают нижние границы коэффициента усиления k* и порядка астатизма ν*. При этом требования точности применительно к коэффициенту усиления и порядку астатизма проектируемой системы можно записать в виде:

Используя эти неравенства, можно сформировать низкочастотный участок ЛАЧХ с помощью корректирующих устройств.
б) требования к качеству переходного процесса задаются в виде ограничения на верхние границы перерегулирования σ% и времени переходного процесса σ% ≤ σ*%, tp ≤ tp*,
где σ*%, tp* - заданные (допустимые) значения.
От требований к перерегулированию можно перейти к ограничениям на запасы устойчивости по фазе γ и амплитуде 
γ ≥ γ*, ≥ *,
где γ* и * - нижние допустимые значения.
Преимущественно задают лишь допустимое значение запаса устойчивости по фазе γ*.
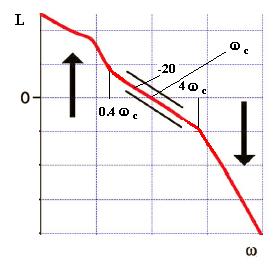
Хорошая замкнутая система управления должна иметь достаточно широкую полосу пропускания и малую колебательность. Полоса пропускания замкнутой системы управления зависит от частоты среза  c, при которой ЛАЧХ разомкнутой системы пересекает ось частот на уровне 0 дБ. Установлено, что для обеспечения малой колебательности (малого перерегулирования) наклон среднечастотного участка ЛАЧХ разомкнутой системы, которому принадлежит частота среза, должен быть равным -20дБ/дек и его протяженность должны составлять примерно 1 декаду.
c, при которой ЛАЧХ разомкнутой системы пересекает ось частот на уровне 0 дБ. Установлено, что для обеспечения малой колебательности (малого перерегулирования) наклон среднечастотного участка ЛАЧХ разомкнутой системы, которому принадлежит частота среза, должен быть равным -20дБ/дек и его протяженность должны составлять примерно 1 декаду.
При этом, зная σ*%, можно найти γ*, используя соотношения

 100ζ.
100ζ.
Здесь ζ – относительный коэффициент затухания доминирующих полюсов замкнутой скорректированной системы.
Типовая ЛАЧХ:
Зная tp*, при 5% допустимой ошибке для типовой ЛАЧХ можно найти c* по формуле
tp*=3/c*.
в) помехоустойчивость
ПФ по шуму измерения ошибки имеет вид
 .
.
Условие высокой помехоустойчивости | |<<1, ≥ s, выполняется, если |W(j )|<<1, ≥ s, где s – нижняя предельная частота спектра шума измерений, как правило, s>> c, т.е. шум измерения – высокочастотная помеха. Отсюда
|<<1, ≥ s, выполняется, если |W(j )|<<1, ≥ s, где s – нижняя предельная частота спектра шума измерений, как правило, s>> c, т.е. шум измерения – высокочастотная помеха. Отсюда
L( )=20lg |W(j )|<<0, ≥ s.
Это требование сводится к тому, чтобы ЛАЧХ скорректированной разомкнутой системы принимала малые значения в области спектра шума измерений, т.е. в области высоких частот.
Вводя в действие эти ограничения - большие значения АЧХ на низких частотах, малые значения АЧХ на высоких частотах и наклон –20 дБ/дек в окрестности частоты среза - приходим к формированию ЛАЧХ L желаемой разомкнутой системы, которая выглядит качественно подобно изображенной на вышеприведенном рисунке.
Черная стрелка слева отражает схематически желаемые свойства с точки зрения точности воспроизведения на низких частотах, где L должна быть выше некоторой границы. В то время как черная стрелка справа отражает желаемое ослабление влияния шума измерений на высоких частотах, где L должна проходить ниже некоторой границы, Параллельные черные линии отражают желание, чтобы наклон L в окрестности частоты среза был равен –20 дБ/дек.
Задача параметрического синтеза:
Требуется найти параметры q1…ql ПФ КУ  W2(p), при которых скорректированная система будет удовлетворять всем предъявляемым к ней требованиям.
W2(p), при которых скорректированная система будет удовлетворять всем предъявляемым к ней требованиям.
Рассмотрим проектирование типовых корректирующих устройств, называемых регуляторами.
Эта задача разбивается на две части: выбор вида регулятора, собственно выбор ПФ W2(p) в общем виде и выбор, или «настройка», свободных параметров.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 889; Нарушение авторских прав?; Мы поможем в написании вашей работы!