КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общая структура САУ
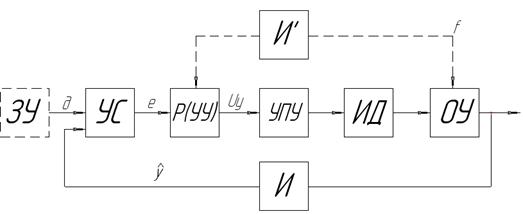
ЗУ – обычно на схемах не изображают.
УС – необходимо для составления  и
и  .
.
И – измеритель  . На выходе УС
. На выходе УС  .
.
Часто УС и Р(УУ) совмещается водном устройстве.
§3. Классификация САУ.
- По принципу действия:
1. разомкнутые;
2. замкнутые (с обратной связью);
3. комбинированные (сочетают регулирование по отклонению с регулированием по внешнему воздействию).
- По цели управления:
1. системы автоматического регулирования (САР) – цель управления состоит в возможно более точном воспроизведении регулируемой переменной закона изменения задающего воздействия ;
САР в зависимости от вида функции делятся на:
- системы стабилизации, или системы поддержания постоянства регулируемой величины; в них
 ;
; - следящие системы, в них изменяется по произвольному, заранее не известному закону; в этих системах регулируемая переменная, как правило, имеет смысл линейного или углового перемещения;
- системы программногоуправления – в них изменяется по произвольному, но известному закону.
Для всех трех типов САР цель управления может быть сформулирована одинаково в терминах ошибки регулирования: она должна быть как можно меньше по абсолютному значению и как можно быстрее затухать; пример ЦУ: 
2. (не для запоминания) САУ других типов (обычно более сложные), например:
- адаптивные системы – в них цель управления, характерная для САР, должна достигаться в условиях изменения или априорной неопределенности значений параметров или внешних возмущений из заданного класса, причем недостаток априорной информации об этих факторах восполняется в процессе функционирования системы;
- оптимальные системы – обеспечивают экстремум некоторого показателя качества;
- системы терминального управления – обеспечивают достижение заданного состояния в заданный момент времени.
- По классу уравнений, описывающих систему:
1. линейные и нелинейные САУ; в линейной системе все элементы описываются линейными уравнениями (дифференциальными, алгебраическими и др.); уравнение линейно, если для него выполняется принцип суперпозиции, предполагающий наличие свойств однородности и аддитивности, как по входным воздействиям, так и по начальным условиям.
Как линейные, так и нелинейные системы бывают:
· стационарные и нестационарные (уравнения с постоянными или зависящими от времени коэффициентами);
· с сосредоточенными и распределенными параметрами (дифференциальные уравнения обыкновенные и с частными производными);
· системы с запаздыванием (уравнения с запаздывающим аргументом);
· дискретные системы (разностные уравнения);
· статические и динамические системы (алгебраические или дифференциальные, возможно вместе с алгебраическими, уравнения).
IV. По характеру преобразования переменных в элементах системы:
1. непрерывные системы – в них в каждом  звене при непрерывном изменении входной переменной
звене при непрерывном изменении входной переменной  выходная
выходная  изменяется также непрерывно;
изменяется также непрерывно;
2. релейные системы – в них хотя бы в одном элементе при непрерывном изменении выход изменяется скачком;
3. дискретные системы – в их элементах значение выхода зависит от значений входа в дискретные моменты времени  ; при этом выход дискретного элемента имеет вид последовательности импульсов;
; при этом выход дискретного элемента имеет вид последовательности импульсов;
дискретные системы делятся на:
· импульсные (в них имеется квантование по времени) и
· цифровые, или системы с ЭВМ (квантование по времени и по уровню).
- По характеру процессов в системе:
1. Детерминированные и стохастические САУ (определенные и случайные процессы).
VI. По числу входных (задающих) и выходных (управляемых) переменных:
1. одномерные (с одним входом и одним выходом) и многомерные(со многими входами и (или) выходами) системы;
2. односвязные системы (каждая компонента вектора выходов  зависит только от одной, соответствующей ей, компоненты вектора входов
зависит только от одной, соответствующей ей, компоненты вектора входов  ) и многосвязные системы (хотя бы одна из компонент зависит более чем от одной компоненты либо хотя бы одна компонента влияет более чем на одну компоненту ).
) и многосвязные системы (хотя бы одна из компонент зависит более чем от одной компоненты либо хотя бы одна компонента влияет более чем на одну компоненту ).
|
Дата добавления: 2014-01-07; Просмотров: 1825; Нарушение авторских прав?; Мы поможем в написании вашей работы!