КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Технологічні схеми роботи канатних механічнх лопат
|
|
|
|
На відкритих гірничих роботах знайшли широке застосування канатні механічні екскаватори ЕКГ ”пряма лопата” (Рис.). Черпання гірських порід здійснюється в м’яких породах без попереднього розрихлення породи вибуховими роботами, і з попереднім розрихленням вибухом або розрихлювачами скальних порід, з послідуючим їх навантаженням в транспорті засоби. Технічні характеристики екскаваторів ЕКГ наведені в табл.2
Таблиця 2. Технічні характеристика кар′єрних механічних лопат ЕКГ
| Параметр | ЕКГ-5А | ЕКГ-8і | ЕКГ-10 | ЕКГ-12 | ЕКГ-20 |
| Місткість ковша, м3 | |||||
| Довжина стріли, м | 10,5 | 13,3 | |||
| Довжина рукояті, м | 7,8 | 11,4 | 12.2 | 13,5 | 12,2 |
| Радіус зачерпування, м | 14,4 | 18,2 | 15,4 | 22,5 | 21,6 |
| Висота зачерпування, м | 12,5 | 14,5 | 15,6 | 17,9 | |
| Радіус розвантаження, м | 12,6 | 16,3 | 14,4 | 19,9 | |
| Напірне зусилля, м | |||||
| Швидкість підйому, м/с | 0,87 | 0,94 | 0,98 | 1,1 | 1.5 |
| Швидкість напору, м/с | 0,45 | 0,41 | 0,55 | 0,61 | 0.75 |
В залежності від системи напірного механізму і конструкції стріли розрізняють два основних типи канатної прямої лопати (Рис.6):
- на напірну з зубчато-рейочнмм механізмом напору
- на напірну з канатним механізмом напору.
а) б)


Рис. 6 Канатні одноковшеві екскаватори “пряма лопата”
а – з зубчато-рейковим механізмом управління рукояттю; б – з канатним механізмом напору рукояті.
Одна з найпоширеніших машин, що застосовується на відкритих гірничих роботах, є одноковшевий кар’єрний екскаватор ЕКГ–5А та ЕКГ-8і Конструктивні схеми канатного екскаватора з управління робочим обладнанням наведені на рис. 7. Рукоять має три ступені рухливості. Робочі рухи ковша забезпечуються піднімальним і напірним механізмами при обертовому русі барабанних лебідок підйому та напору.
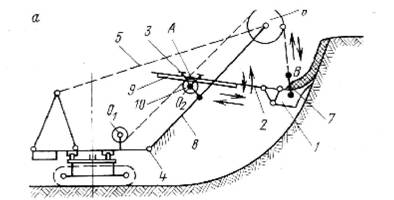
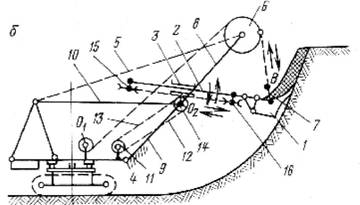
Рис.7 Конструктивні схеми прямої напірної лопати з висувною рукояттю а) - з з убчато-рейочним механізмом напору; б)- з канатним механізмом напору
1 – ківш; 2 – рукоять; 3 – сідловий підшипник; 4 – п’ятковий шарнір; 5 – підвісний канат; 6 – головний блок; 7 – підвіска ковша; 8 – стріла; 9 – зубчата рейка; 10 – підтримуючий підкіс; 11 – напірна лебідка; 12 і 13 – канати управляння рукояттю; 14 – центральний блок; 15 і 16 – напівблоки
По схемі рис 7.а - зубчато-рейковим механізмом напору (рис.7), розташований на стрілі 8, передає зусилля на зубчату рейку 9 рукояті через шестерню 10 з віссю обертання О2 і точкою контакту повзунів сідлового підшипника з рукояттю (точка А);
Для конструкції екскаватора по схемі Рис.7 б - канатний механізм напору (рис.8) розташований на стрілі, яку шарнір О2 ділить на дві частини – верхню 8 і нижню 9, підтримувану підкосом 10. Напірна лебідка 11 розташовується на платформі. Висування й повертання рукояті здійснюється канатами 12 і 13, які обгинають центральні блоки 14, закріплені на осі О2 і напівблоки 15 і 16, закріплені на рукояті.
Стійка підтримується підкосом 10. Напірна лебідка 11 розташована в передній частині платформи.
Схема екскаваторного вибою з застосуванням канатного екскаватора пряма механічна лопата наведена на рис. 8
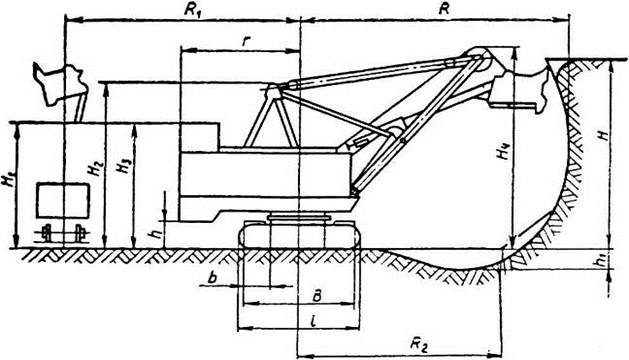
Рис. 8. Схема та параметри роботи екскаватора пряма механічна лопата
R – максимальний радіус черпання, м; R1 – максимальний радіус розвантаження, м; R2 – радіус черпання на рівні стоянки; r – радіус обертання платформи, м; Н – максимальна висота черпання; Н1, Н3 – висота розвантаження, м; Н2 – висота двоногої стійки, м; В, L – розміри ходової частини
До робочих параметрів екскаватора відносяться радіус і висота черпання і розвантаження, які залежать від довжини рукояті і стріли, кута нахилу останньої, а також від положення пунктів черпання і розвантаження (рис.9).
Радіус черпання Rч - горизонтальна відстань від осі обертання екскаватора до ріжучої кромки ковша при черпанні. Розрізняють: максимальний радіус черпання Rч.max - при максимально висунутій горизонтальній рукояті, мінімальний радіус черпання Rч. min. - при підтягнутій до гусеницях рукояті з ковшем на горизонті установки екскаватора, Rч.у - максимальний радіус черпання на горизонті установки екскаватора, а також радіус черпання при максимальній висоті черпання. Висота черпання НЧ - вертикальна відстань від горизонту установки екскаватора до ріжучої кромки ковша при черпанні. Максимальна висота черпання НЧ.max. відповідає положенню з максимально піднятою рукояттю. Розрізняють також висоту черпання при максимальному радіусі черпання і максимальну глибину черпання нижче горизонту установки екскаватора hЧ.
- Радіус розвантаження Rр - горизонтальна відстань від осі обертання екскаватора до осі ковша при розвантаженні; максимальний радіус розвантаження Rр.max. - Відповідає максимально висунутої горизонтальній рукояті.
- Висота розвантаження НР - вертикальна відстань від горизонту установки екскаватора до нижньої кромки відкритого днища ковша; максимальна висота розвантаження НР.max. відповідає максимально піднятою рукояті. Мінімальні значення радіусів черпання і розвантаження не збігаються з відповідними максимальними значеннями висот розвантаження.
- Область робочої дії екскаватора визначається радіусом і висотою черпання і розвантаження. При цьому зазвичай кут нахилу стріли αс = 45 о. У деяких мехлопат кут αс може змінюватися в межах 30 - 50 о. Зі збільшенням кута αс збільшується висота і зменшуються радіуси дії екскаватора.
- Габарити екскаватора визначаються радіусом обертання задньої частини кузова RК, висотою екскаватора НЕ (вертикальне відстань від горизонту установки екскаватора до верхнього краю найбільш виступаючої вгору незнімної його частини), висотою кузова екскаватора hk.
- Швидкість руху мехлопати на гусеничному ходу складає 0,9 - 3,7 км / г. Максимальний транспортний підйом досягає 12 о при масі екскаватора до 100 т і до 70 n для більш великих моделей.
- Максимальне питомий тиск на грунт не повинен перевищувати несучої здатності основи, яка змінюється від 0,2 мПа для м'якого піску, до 0,5 - 0,6 мПа для щільної глини і до 0,8 - 1,0 мПа для мергелю.
Під час роботи мехлопата черпає породу з заходки знизу вгору і по мірі відпрацювання переміщається вперед.
Робочий цикл екскаватора складається з чотирьох основних операцій: наповнення ковша (черпання), повороту на вивантаження, вивантаження породи з ковша і повороту в забій. Додаткові руху зазвичай поєднуються з основними: винос і опускання ковша для розвантаження з поворотом екскаватора із забою, а опускання ковша для черпання з поворотом екскаватора в забій. Середня тривалість циклу екскаваторів ЕКГ залежить ві конструкцій екскаватора, фізико-механічних характеристик порід черпання, умов та режимів роботи. Сумарна тривалість робочого циклу різних типів екскаваторів складає від 20 40 секунд. Найбільший час (близько 60%) тривалості циклу при нормальних умовах роботи займають повороти екскаватора. Тому із зменшенням кута повороту екскаватора β зменшується робочий цикл екскаватора і збільшується його продуктивність.
Профіль забою мехлопати в м'яких і щільних породах відповідає траєкторії руху ковша і має кут укосу 70 - 80о. Товщина стружок t, зрізаних ковшем, визначається його розмірами та щільністю породи і становить 0,2 - 1 м.
Висота вибою визначається висотою черпання екскаватора і по умові безпеки роботи в зв'язкових породах не повинна перевищувати максимальної висоти черпання. В іншому випадку на покрівлі уступу будуть залишатися козирки і нависи, які можуть обвалюватися. Мінімальна висота вибою повинна забезпечувати повне наповнення ковша екскаватора за одне черпання.
Максимальна ширина вибою обмежується радіусом черпання екскаватора на рівні стояння. Відстань від осі переміщення екскаватора при роботі в забої до укосу уступу не може перевищувати радіусу черпання екскаватора на рівні стояння Rч. У. В іншому випадку у підошви буде залишатися порода. Тому ширина внутрішньої частини вибою приймається рівною радіусу черпання екскаватора на рівні стояння. У зовнішній частині забою порода може бути захоплена ковшем лише тоді, коли кут повороту екскаватора в бік виробленого простору не перевищує 45о. В іншому випадку порода при черпанні буде відсуватися ковшем у вироблений простір і не зачерпуватися. Тому в м'яких породах ширину зовнішньої частини вибою приймають рівною не більше (0,5 - 0,7) Rч. У. Таким чином, за умовою нормального черпання ширина забою в м'яких породах не повинна перевищувати (1,5 - 1,7) Rч. У.
Мінімальна відстань екскаватора від забою вибирається з умов безпеки та можливості відпрацювання нижньої брівки. Безпечне відпрацювання нижньої брівки забою можлива при вільному відстані між гусеницями і навалом не менше 1,5 довжини ковша. При більш близькому розташуванні для вирівнювання підошви необхідні пересування екскаватора.
При роботі екскаватора в скельних породах велике значення має якість їх розпушення. Мілкоподрібнена порода екскавується без затруднень, так як ківш заповнюється на невеликій ділянці, черпання можна виробляти товстої стружкою, а сипучість матеріалу забезпечує швидке і повне розвантаження ковша. При роботі в погано підірваному забої значно зростають навантаження на обладнання, що призводять до його зносу і поломок. Знижується продуктивність. Негабарити виймають селективно і розташовують у підошви уступу для вторинного дроблення.
Параметри забою під підірваних породах приймають виходячи з необхідності кращого дроблення порід, за умовами селективної виїмки, для скорочення ширини робочої площадки і т. п.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1550; Нарушение авторских прав?; Мы поможем в написании вашей работы!