КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трёхфазные асинхронные двигатели
|
|
|
|
1.1
Электрические машины постоянного тока.
Назначение:
Преобразование электрической энергии в механическую и наоборот. Генераторы служат источниками электрической энергии двигатели – механической. Первой электрической машиной был двигатель постоянного тока изобретённый в 1838 году Б. С. Якоби. Генераторы постоянного тока (ГПТ) применяют для питания двигателей, зарядки аккумуляторов, электросварки и др. Преимуществом ДТП является возможность с помощью относительно простых устройств обеспечивать плавное регулирование частоты вращения при большом пусковом моменте. Главным недостаткам является наличие щёточно-коллекторного узла, искрение которого ограничивает области их применения, особенно в космосе, химической промышленности и так далее.
Устройство:
Статор: станина, полюсы, подшипниковые щиты, щёткодержатели со щётками, паспортная табличка, вводное устройство. Станина выполняется из ферромагнита и является частью магнитной системы. Полюс состоит из ферромагнитного сердечника и катушки (количество полюсов 2, 4, 6, 8). Подшипниковые щиты изготовляются из чугуна. Паспортная табличка крепиться к станине. Вводное устройство крепиться с боку станины или сверху и закрепляется крышкой. Основа изоляционная панель в виде шпилек к которым присоединяются выводы обмоток. Щёткодержатели крепятся к одному из подшипников, количество щеткодержателей равно количеству полюсов. Если щёток больше двух, то они соединяются параллельно образуя два зажима. Полюс является частью магнитной системы катушки всех полюсов, соединённых между собой последовательно и образуют обмотку возбуждения, выводы от этой обмотки, присоединяются к выводам вводного устройства.
Якорь: вал, сердечник ферромагнитный, обмотка, коллектор, вентилятор. Сердечник выполнен в виде цилиндра имеет пазы для обмотки, сердечник является частью магнитной системы, коллектор выполняется в виде цилиндра и состоит из большого числа медных изолированных друг от друга и от вала пластин, обмотка якоря выполняется из отдельных секций (катушек), начало и конец которых присоединяются к коллекторным пластинам, в результате обмотка якоря образует замкнутый контур с отпайками соединенными коллекторными пластинами. На коллектор накладываются и прижимаются к нему пружинами щётки, образуя зажимы от якоря. С помощью щёток осуществляется съём или подвод тока к вращающимся проводникам якоря. На принципиальных схемах двигатель обозначают следующим образом.
Принцип действия генератора:
Исходное состояние: обмотка возбуждения подключена к источнику постоянного тока (таким источником может быть и обмотка якоря самого генератора). К зажимам якоря подключён приёмник постоянного тока. Вал якоря сочленён с каким-то первичным двигателем и вращается с постоянной частотой вращения n.
Ток в обмотке возбуждения создаёт неподвижное в пространстве магнитное поле с магнитным потоком Ф. При своём движении провода обмотки якоря пересекают линии магнитной индукции поля статора и в них, проводах индуцируется ЭДС (направление ЭДС можно определить по правилу правой руки). ЭДС отдельных проводов определённым образом складывается и образуют результирующею ЭДС якоря Е, эта ЭДС создаёт в приёмнике и в проводах обмотки якоря электрический ток. Ток в якоре взаимодействует с магнитным полем статора результатом чего является электромагнитный момент М, направленный встречно вращению якоря, который преодолевает первичный двигатель (направление момента можно определить по правилу правой руки). Таким образом механическая энергия первичного двигателя преобразуется в электрическую энергию потребляемую приёмником, при этом часть (5-20…30%), энергии теряется безвозвратно (идёт на нагрев генератора). Ток в проводах обмотки якоря переменный, а в приёмнике постоянный, выпрямителем является коллекторно-щёточный узел.
Принцип действия двигателя:
Исходное состояние: обмотка возбуждения подключена к источнику постоянного тока, обмотка якоря так же подключена к источнику постоянного тока этого же или другого; статор неподвижно закреплён, вал сочленён с исполнительным органом рабочей машины. Ток в обмотке возбуждения IВ создаёт магнитное поле с магнитным потоком Ф. Ток в обмотке якоря (ток IЯ якоря) создается источником питания, IЯ взаимодействует с магнитным полем статора, результатом чего является электромагнитный вращающийся момент М (правило левой руки) под действием которого якорь вращается, преодолевая противодействующий момент со стороны исполнительного органа рабочей машины. В проводах вращающегося якоря индуцируется ЭДС (суммарный ЭДС), и следовательно ток якоря обусловлен совместным действием источника питания и ЭДС якоря, таким образом электрическая энергия поступающего от источника питания преобразуется в механическую энергию, при этом часть электрической энергии идёт на нагрев двигателя.
Назначение основных конструкционных элементов машины:
Станины выполняется из ферромагнетика и является частью магнитной системы и корпусом двигателя;
Полюс состоит из ферромагнитного сердечника и катушки. Он является частью магнитной системы;
Обмотка полюса создаёт основной магнитный поток (постоянное магнитное поле), выполняется из меди;
Сердечник якоря набирается из стальных штампованных листов (электротехнической стали);
Обмотка якоря – обмотка, в которой основным магнитным потоком индуцируется ЭДС (медная проволока);
Коллектор состоит из медных изолированных друг от друга пластин. Служит для преобразования переменной ЭДС на щётках генератора.;
Щёточный узел – с помощью щеток осуществляется съём или подвод тока к вращающимся проводникам якоря.
Обратимость электрической машины:
МПТ имеют три основные режима работы. В качестве источника постоянного тока – генераторный режим. В качестве привода – двигательный режим. В качестве изменения направления движения механизма противовключения.
Формулы ЭДС якоря и электромагнитного момента и их физический смысл:
При анализе электрических машин ЭДС и электромагнитный момент определяют по формулам:

Обоснование: 
При работе электрические машины в режиме хх до номинального ЭДС и напряжения отличаются друг от друга не значительно (всего на несколько %). В генераторе E>U; в двигателе E<U.
Схема замещения и уравнение электрического состояния цепей якоря и возбуждения:
Обмотка возбуждения является пассивным приёмником постоянного тока, поэтому замещается одним резистивным элементом RВ

Якорь генератора является источником постоянного тока, схема замещения
RЯ – сопротивление якоря, сюда входит сопротивления проводов обмотки якоря, а так же сопротивление щёток, коллекторных пластин и переходное сопротивление скользящих контактов.
Якорь двигателя является активным приёмником, поэтому на схеме замещения представляется двумя элементами.

1.2 Двигатели с независимым и с параллельным возбуждением и с постоянными магнитами:
По способу возбуждения двигатели подразделяют на следующие виды:
- с независимым возбуждением
- с параллельным возбуждением
- с последовательным возбуждением
- со смешанным возбуждением
В двигателях первого вида обмотки якоря и возбуждения питаются от одного источника
В двигателях второго вида обмотки соединяются параллельно и питаются от одного источника
В двигателях третьего вида обмотки соединяются последовательно и питаются от одного источника
В двигателях четвёртого вида содержатся две обмотки параллельные и последовательные
- Особую группу представляют собой двигатели, которые не имеют обмотки возбуждения, магнитное поле в них создаётся постоянными магнитами, которые устанавливаются вместо полюсов.
В станкостроении применяют двигатели 1,2 и 5 видов.
Схема включения в сеть:
Схема ручного (неавтоматического) управления
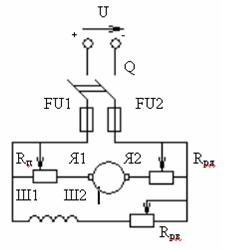 Q – двухполюсный выключатель.
Q – двухполюсный выключатель.
FU – плавкие предохранители защищают двигатель от перегрузки.
Rn- пусковой реостат для ограничения пускового тока якоря.
Rя – регулировочный реостат служит для уменьшения частоты вращения якоря.
Ш – зажимы обмотки возбуждения.
Rрв – регулировочный реостат в цепи возбуждения служит для увеличения частоты вращения якоря.
Скоростные и механические характеристики:
Под скоростными характеристиками понимают зависимость n=f (Iя) при постоянном U
Iв =const (Ф=const) Rря=const
Механическая характеристика - зависимость n=φ(М) при тех же условиях.
Эти характеристики являются статическими, т.е. каждую точка характеристики соответствует установившемуся режиму работы двигателей.
По скоростным кинематическим характеристикам оценивают механические свойства двигателей.
Уравнение скоростной характеристики можно получить из  и
и  :
:
Если в данное уравнение вместо Iя подставим  то получим уравнение механических характеристики:
то получим уравнение механических характеристики:
Каждый двигатель имеет одну естественную скоростную и одну естественную механическую характеристики и бесконечное множество искусственных.
Естественную характеристику получаем при 
 (Ф=Фном) и
(Ф=Фном) и
Rря=0 – полностью выведенном регулировочном реостате.
Уравнение естественных характеристик:
 - скоростная характеристика (естественная)
- скоростная характеристика (естественная)
 - механическая характеристика (естественная)
- механическая характеристика (естественная)
Эти характеристики представляют собой прямые, которые можно построить по двум точкам (номинальному и идеальному холостому ходу)

 ; так как
; так как  неизвестно, то
неизвестно, то  найдём по формуле:
найдём по формуле:
=
Естественные характеристики рассматриваемого нами двигателя очень жёсткие: при переходе от холостого хода к номинальному режиму частота вращения двигателя изменяется незначительно, и поэтому эти двигатели широко применяются в станкостроении (Металлообработке)
Свойство саморегулирования вращающего момента в соответствии с противодействующим моментом:
Любому двигателю присуще свойство саморегулирования вращающего момента в соответствии с противодействующим моментом на валу. Этим электрические двигатели отличаются от других типов двигателя
Процесс саморегулирования заключается в следующем:
Пусть двигатель работает в режиме, при котором M=M’; n=n’
В какой-то момент времени статический момент на валу двигателя изменили (Мс↑)
Так как Мс больше вращающего момента, то частота вращения якоря начинает постепенно уменьшаться в результате ЭДС якоря так же постоянно уменьшается () это приведёт к увеличению тока якоря, что в свою очередь приведёт к увеличению вращающего момента M() и этот переходный процесс идёт до тех пор, пока вращающий момент двигателя не с равняется со статическим моментом и в новом установившемся режиме двигатель будет работать с частотой n’’<n’ при M’’>M’. Это можно показать на статической механической характеристике
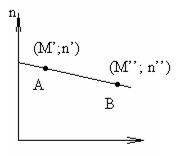
Mc ↑→n↓→E↓→Iя↑→M↑
n’’<n’ M’’>M’
Способы пуска в ход:
(1)
(2)
(3)
 (4)
(4)
 (5)
(5)
Ток якоря, исходя из (3) определяем

В начальный момент пуска (в момент включения Q) ток якоря неподвижен E=0, поэтому ток якоря (начальный) пусковой:

Большой ток для двигателя опасен (для коллекторно-щёточного механизма), поэтому ток необходимо ограничить (1,5 ÷2,5)  в зависимости от тока различными способами:
в зависимости от тока различными способами:
- резисторный (реостатный)
- пуск при пониженном напряжении
При первом способе последовательно с якорем включают пусковой реостат и включают двигатель на номинальное U. Последовательно с якорем включают пусковой реостат сопротивление которого подбирают так чтобы пусковой ток не превышал допустимое значение. Затем якорь подключают к источнику питания и по мере разгона якоря пусковой реостат плавно выводят и в конце пуска оказывается полностью выведенным.
Напряжение источника снижают так, чтобы пусковой ток не превысил допустимое значение, затем якорь подключают к этому источнику и по мере разгона якоря напряжение плавно увеличивают вплоть номинального значения.
Реверсирование, регулирование частоты вращения:
Для реверсирования двигателя достаточно изменить направление либо тока якоря, либо направление тока возбуждения. Для этого необходимо провода, присоединённые к обмотке якоря, либо обмотки возбуждения поменять местами. Способы регулирования частоты вращения «видны» из уравнений скоростной и механической характеристик.
1) уменьшение частоты вращения за счёт уменьшения напряжения источника, питающего якорь двигателя. Очевидно, что при изменении напряжения изменяется частота вращения х/х, а наклон характеристик остаётся без изменений.
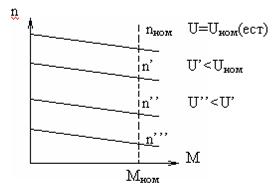
закон регулирования:
M=const
IВ=const
IЯ= const
Р= Var
2) уменьшение частоты вращения за счёт введения в цепь якоря регулировочного реостата

При этом способе регулирования частота вращения холостого хода неизменна, а изменяется наклон.
Закон изменения:
M=const;
IВ=const;
IЯ= const;
Р= Var
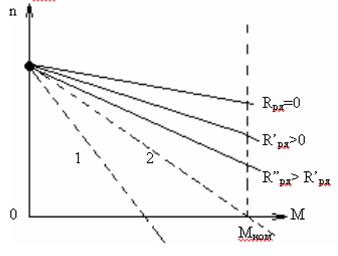
При 1 и 2 двигатель остановится
3) увеличение частоты вращения за счёт ослабления магнитного поля (уменьшение магнитного потока за счёт уменьшения тока возбуждения). Т.к. ток якоря зависит от магнитного потока  , то чтобы в процессе регулирования не перегружать двигатель током, устанавливают следующий закон регулирования: M = var; IВ = var;
, то чтобы в процессе регулирования не перегружать двигатель током, устанавливают следующий закон регулирования: M = var; IВ = var;
IЯ = const; Р= const
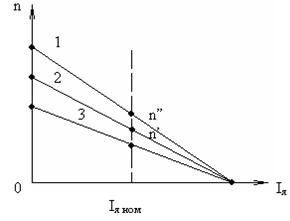
1 – Ф” < Ф’
2 – Ф’< Фном
3 – Ф = Фном
Торможение двигателя:
В практике применяют 3 способа электромагнитного торможении двигателя:
- генераторное рекуперативное торможение
Уменьшают Uя так чтобы оно стало меньше ЭДС в результате изменяется направление тока якоря, изменяется направление эл магн момента (он становится тормозным) и происходит торможение якоря т.е. плавное уменьшение частоты вращения. Двигатель работает в генераторном режиме преобразуя кинетическую энергию якоря в кинетическую и возвращая её источнику питания. ЭДС сравняется с напряжением (реж х х) и далее машина вновь переходит в двигательный режим. В новом установившемся режиме якорь вращается медленее, чем в предыдущем установившемся режиме.
- генераторное динамическое торможение
Обмотку якоря отключают от источника питания и замыкают на тормозной резистор в результате изменяется направление тока якоря (он определяется только ЭДС и совпадает с ней по направлению). Изменяется направление эл магн момента двиг переходит в генераторный режим и тормозится вплоть до остановки. Изменением сопротивления тормозного резистора можно изменять время торможения.
- торможение противовключением (изменяют напряжение и Iя, в результате изменения направления электромагнитного момента и двигатель тормозится, если в момент остановки якоря двигатель не будет отключен, то якорь после это начнёт вращаться в противоположную сторону - реверсирование)
Преобразование энергии в двигателе:
*  *
*
 2
2 
Pв=∆ Pв Ря=Рэл+∆Ря
Pв+ Ря= Р1
Мощность энергии, которая потребляется двигателем от источника питания, складывается из мощности, потребляемой якорем и обмоткой возбуждения. При этом энергия, потребляемая обмоткой возбуждения, целиком и полностью преобразуется в тепловую энергию.
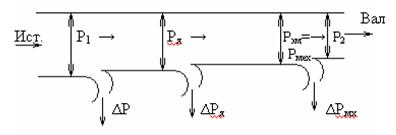 Энергия, которая потребляется якорем, частично преобразуется в тепловую и большей частью в механическую (электромагнитную). Процесс преобразования удобно показать в виде энергетической диаграммы
Энергия, которая потребляется якорем, частично преобразуется в тепловую и большей частью в механическую (электромагнитную). Процесс преобразования удобно показать в виде энергетической диаграммы
∆Рмх – мощность механических и других неучтённых электрических уравновешенных потерь (трения и другие).
 = η, которая существенно зависит от степени загруженности двигателя
= η, которая существенно зависит от степени загруженности двигателя
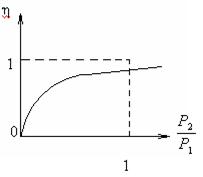
Максимальное значение η имеет место при 60 – 80 % загруженности двигателя
! Не следует выбирать двигатели завышенной мощностью.
2.1 Назначение:
Асинхронная машина – это бесколлекторная машина переменного тока, у которой в установившемся режиме магнитное поле, участвующее в основном процессе преобразования энергии, и ротор, вращаются с разными скоростями [2]. Преимущества АД: простота конструкции, высокая надежность, простейшие требования к уходу, отсутствие искрящихся частей, что позволяет широко применять их в лесообрабатывающей промышленности. Трехфазные асинхронные двигатели достигают мощности 5000 кВт. При мощности до 1000 Вт двигатели выполняют и однофазными (для стиральных машин, бытовых холодильников и т.д.).
Устройство, ТАД с короткозамкнутым и фазным ротором:
Самый распространённый вид. Статор содержит корпус из любого материала, ферро-магн. сердечник –полый цилиндрический из тонких (0.35мм) листов эл. тех. стали. Сердечник имеет на внутренней поверхности равномерно распределённые по окружности продольные пазы в которые уложена обмотка статора. С торца имеются подшипниковые щиты которые крепятся к корпусу. Сбоку или сверху к корпусу крепятся вводные устройства закрытые крышкой. Основным устройством является изоляционная панель с 6-ю токопроводящими шпильками. К каждой шпильке присоед 1 провод обмотки статора. Обмотка статора состоит из 3х идентичных катушек (фаз) сдвинутых в пространстве на 120. начала и концы фаз маркируют чтоб можно было соеденить звездой или треугольник.
Начала и концы выводятся на панель вводного устройства.
выводятся на панель вводного устройства.
Способ соединения фаз зависит от номинального линейного напряжения питающей сети и номинального напряжения двигателя. На паспортной табличке которая крепится к корпусу указаны 2 номинальных напряжения двигателя через дробь. Если номинальное напряжение сети равно меньшему номинальному напряжению двигателя то обмотку следует соединить треугольником, если большему то звездой. В любом случае на каждой фазе напряжения равны меньшему значению.
Для удобства соединение фаз вводного устройства имеет вид
Ротор содержит вал на валу закреплен ферро-магн. сердечник в виде цилиндра из листов эл. тех. стали. На внешней поверхности сердечника имеются равномерно распред-е по окружности продольные пазы в которые уложена обмотка ротора. Двители делят на 2 вида-с короткозамкнутым и ротором. Обмотка фазн ротора выполняется по аналогии с обмоткой статора соединённой звездой и 3 свободных конца припаеваются к 3м медным контактным кольцам. Кольца жёстко закреплены на валу и изолированы друг от друга и от вала. На кольца накладывают неподвижные щётки с помощью которых каждую фазу ротора можно включить пусковую, либо регулировочную аппаратуру. Обмотка короткозамкнутого ротора напоминает белечье колесо. Состоит из продольных стержней из Al, с торца эти стержни соединены кольцами. На валу закреплен вентилятор который обивается защитным кожухом.
в виде цилиндра из листов эл. тех. стали. На внешней поверхности сердечника имеются равномерно распред-е по окружности продольные пазы в которые уложена обмотка ротора. Двители делят на 2 вида-с короткозамкнутым и ротором. Обмотка фазн ротора выполняется по аналогии с обмоткой статора соединённой звездой и 3 свободных конца припаеваются к 3м медным контактным кольцам. Кольца жёстко закреплены на валу и изолированы друг от друга и от вала. На кольца накладывают неподвижные щётки с помощью которых каждую фазу ротора можно включить пусковую, либо регулировочную аппаратуру. Обмотка короткозамкнутого ротора напоминает белечье колесо. Состоит из продольных стержней из Al, с торца эти стержни соединены кольцами. На валу закреплен вентилятор который обивается защитным кожухом.
Назначение основных конструктивных элементов:
Корпус служит для охлаждения и крепления паспортной таблички, изготовляется из любого материала;
Сердечник статора из отдельных листов электротехнической стали. Он является частью магнитной системы;
Сердечник ротора состоит из отдельных листов электротехнической стали, часть электромагнитной системы;
Вводное устройство, с помощью него присоединяется двигатель к источнику питания;
Вал служит для крепления сердечника он передаёт вращающийся момент.
Возбуждение кругового – вращающегося магнитного поля обмоткой статора:
Работа АД основана на использовании вращающихся магнитных полей.
 Рис. 4.1. Схема устройства и подключения
статора трехфазного АД к сети
Рис. 4.1. Схема устройства и подключения
статора трехфазного АД к сети
|
Создание вращающегося магнитного поля. Статор АД (рис. 4.1) аналогичен статору трехфазного генератора. При включении катушек такого статора в трехфазную сеть переменного тока частотой f 1 в них под действием напряжений сети будет возникать симметричная система токов  ,
,  и
и  , временная диаграмма которых показана на рис. 4.2, а. Каждая из катушек создает свою МДС
, временная диаграмма которых показана на рис. 4.2, а. Каждая из катушек создает свою МДС  (
( – число витков катушки). В момент времени
– число витков катушки). В момент времени  (см. рис. 4.2, а) ток положителен в фазе АХ (
(см. рис. 4.2, а) ток положителен в фазе АХ ( ), в фазах BY и CZ токи отрицательны (==
), в фазах BY и CZ токи отрицательны (== ), т.е. они направлены (рис. 4.3) в катушках от А к Х, от Y к B и от Z к C. Токи в катушках создают МДС
), т.е. они направлены (рис. 4.3) в катушках от А к Х, от Y к B и от Z к C. Токи в катушках создают МДС  ,
,  =
= =
= , направления которых в соответствии с правилом буравчика указаны на рис. 4.3, а. В результате совместного действия этих токов образуется общая МДС
, направления которых в соответствии с правилом буравчика указаны на рис. 4.3, а. В результате совместного действия этих токов образуется общая МДС
 , причем
, причем  , которая создает общий магнитный поток
, которая создает общий магнитный поток  (силовые линии его показаны пунктиром). Выполняя такие построения для моментов времени t 2 и t 3 (см. рис. 4.2, а), получим аналогичные картины распределения токов, МДС и потока тех же значений, но с поворотом (смещением) в пространстве соответственно на 120° и 240°. Таким образом, за счет поочередного наступления максимумов тока в катушках (сдвиг во времени токов , и ) и сдвиг катушек в пространстве совокупность трех неподвижных катушек с переменными МДС образует результирующие вращающиеся МДС и магнитное поле постоянной величины.
(силовые линии его показаны пунктиром). Выполняя такие построения для моментов времени t 2 и t 3 (см. рис. 4.2, а), получим аналогичные картины распределения токов, МДС и потока тех же значений, но с поворотом (смещением) в пространстве соответственно на 120° и 240°. Таким образом, за счет поочередного наступления максимумов тока в катушках (сдвиг во времени токов , и ) и сдвиг катушек в пространстве совокупность трех неподвижных катушек с переменными МДС образует результирующие вращающиеся МДС и магнитное поле постоянной величины.
а) б)
Рис. 4.2. Временная (а) и векторная (б) диаграммы ЭДС
трехфазного двигателя
Особенности поля:
1) поле эквивалентно полю вращающегося двухполюсного магнита с полюсами N и S, поэтому внутреннюю поверхность статора можно рассматривать состоящей из двух полюсных делений t (рис. 4.3, а);
2) за один период тока поле делает один оборот, т.е. каждая его точка (например, полюс N) перемещается относительно неподвижной точки статора (например, А) на длину 2 t. За 1 с поле сделает f 1 оборотов, т.е. частота вращения поля  об/мин;
об/мин;
3) вращение поля происходит в направлении чередования токов в обмотках (, затем и ), т.е. от катушки А к катушке В и С;
4) для изменения направления вращения поля нужно изменить порядок следования фаз токов в катушках. Для этого изменяют порядок подключения катушек к сети (пунктир и скобки на рис. 4.1; чередование фаз токов в катушках становится от В к А и С – обратное вращение поля).
а) б) в)
Рис. 4.3. Образование вращающихся МДС и магнитного потока АД:
а)  ; б)
; б)  ; в)
; в) 
2.2 Принцип действия ТАД:
Исходное состояние: статор закреплен, вал сочленен с рабочей машиной, обмотка статора включена в трехфазную сеть. Обмотка ротора замкнута накоротко.
Принцип действия: Трехфазная симметричная система токов обмотки статора. Создает круговое вращающееся магнитное поле, частота вращения которого:

 - частота напряжения источника питания, p- кол-во пар полюсов магнитного поля.
- частота напряжения источника питания, p- кол-во пар полюсов магнитного поля.
Это магнитное поле индуцирует в проводах обмотки ротора ЭДС под действием которого(т.к. обмотка замкнута накоротко) в обмотке ротора возникает электрический ток(ток ротора). Направление ЭДС и тока можно определить по правилу правой руки. Ток ротора взаимодействует с магнитным полем, результатом чего явл. электромагнитный вращающий момент под действием которого ротор вращается, вращая рабочую машину т.о. электрическая энергия поступающая в обмотку статора преобразуется в механическую и частично(10-15%) в тепловую. Ротор вращается в том же направлении что и магнитное поле, но медленнее магнитного поля, относительная разность частот вращения магнитного поля и ротора называется скольжением (S).
 частота вращения ротора. Двигатель общего назначения проектируют таким образом, что в режиме холостого хода скольжение близко к 0, в номинальном режиме скольжение сост. 0,02-0,10. Если на паспортной табличке указано
частота вращения ротора. Двигатель общего назначения проектируют таким образом, что в режиме холостого хода скольжение близко к 0, в номинальном режиме скольжение сост. 0,02-0,10. Если на паспортной табличке указано  значит что двигатель имеет 3 пары полюсов, частота вращения: 1000
значит что двигатель имеет 3 пары полюсов, частота вращения: 1000
 т.е. зная номинальную частоту ротора легко определить p,S,n, в отличии от двигателя постоянного тока полюсов как конструктивных частей статора в двигателе нет. Полюса только магнитные. Под полюсом понимают место на внутренней поверхности статора, откуда линии магнитной индукции выходят(северный полюсN) и куда входят(южный полюсS).
т.е. зная номинальную частоту ротора легко определить p,S,n, в отличии от двигателя постоянного тока полюсов как конструктивных частей статора в двигателе нет. Полюса только магнитные. Под полюсом понимают место на внутренней поверхности статора, откуда линии магнитной индукции выходят(северный полюсN) и куда входят(южный полюсS).
Зависимость параметров двигателя от скольжения:
ЭДС обмотки ротора, частота этой ЭДС зависят от скорости движения проводов обмотки ротора относительно магнитного поля статора наибольшие значения ЭДС и частоты состоит при неподвижном (заторможенным) роторе и подключены к трехфазной сети обмотки статора. Эти величины обозначим следующим образом. Активное и индуктивное сопротивление ротора обозначим. При вращающемся роторе ЭДС, частота пропорциональна скольжению.

Активное сопротивление от частоты не зависит.

Индуктивное сопротивление зависит от частоты.

В каждую фазу обмотки ротора можно представить следующей схемой замещения.
Действующее значение тока можно определить из значения Ома.

Таким образом параметры двигателя зависят от скольжения.
 S
S
Ток в обмотке статора пропорционален току в обмотке ротора. В режиме холостого хода (S=0) в обмотке статора имеется небольшой ток ротора. Электромагнитный вращающий момент есть результат взаимодействия тока обмотки ротора и магнитного потока создаваемого обмоткой ротора.
Учитывая, что ток переменный.
 ; где
; где  -сдвиг фаз между током и ЭДС обмотки ротора. При постоянстве напряжения трехфазной сети магнитный поток постоянен.
-сдвиг фаз между током и ЭДС обмотки ротора. При постоянстве напряжения трехфазной сети магнитный поток постоянен.
Поэтому электромагнитный момент.
Чтобы получить зависимость момента от скольжения необходимо перемножить ординаты этих кривых.
Механическая характеристика ТАД и параметры её характерных точек:
Под механической характеристикой понимают зависимость частоты вращения от момента.

И замкнутой накоротко обмоткой ротора. Эту зависимость можно получить из кривой M(S) используя формулу скольжения.
Механическая характеристика имеет 4 характерные точки по которым она обычно и строится. X –режим идеального холостого хода (М=0;  ). М –соответствует номинальному режиму
). М –соответствует номинальному режиму  . К –критическая точка
. К –критическая точка . П –пусковая
. П –пусковая
В паспорте двигателя указывают номинальную мощность, номинальную частоту вращения ротора,  -кратность максимального момента
-кратность максимального момента
Номинальный момент легко найти по паспортным данным.
Свойство саморегулирования вращающегося момента:
Преобразование энергии в двигателе:
Потребляемая из сети активная мощность  (рис. 4.9, б) частично расходуется при нагреве обмоток статора (потери в обмотке статора
(рис. 4.9, б) частично расходуется при нагреве обмоток статора (потери в обмотке статора  ) и магнитопровода (потери в стали статора
) и магнитопровода (потери в стали статора  ). Остальная мощность – электромагнитная мощность
). Остальная мощность – электромагнитная мощность  , передаваемая вращающимся магнитным полем от статора к ротору. Часть ее расходуется на нагрев обмотки ротора (потери в меди ротора
, передаваемая вращающимся магнитным полем от статора к ротору. Часть ее расходуется на нагрев обмотки ротора (потери в меди ротора  ). Потерями в стали ротора можно пренебречь, так как частота перемагничивания сердечника ротора в номинальном режиме мала. Остальная часть мощности преобразуется в механическую мощность ротора
). Потерями в стали ротора можно пренебречь, так как частота перемагничивания сердечника ротора в номинальном режиме мала. Остальная часть мощности преобразуется в механическую мощность ротора  . Часть последней покрывает механические потери ротора
. Часть последней покрывает механические потери ротора  (трение в подшипниках, работа по перемещению воздуха вентилятором и т.д.). Оставшаяся часть мощности
(трение в подшипниках, работа по перемещению воздуха вентилятором и т.д.). Оставшаяся часть мощности  – полезная механическая мощность, передаваемая рабочей машине. КПД АД
– полезная механическая мощность, передаваемая рабочей машине. КПД АД  . Номинальный КПД АД составляет 0,75-0,95.
. Номинальный КПД АД составляет 0,75-0,95.
Рис. 4.9. Преобразование энергии в АД:
а) схема передачи энергии; в) энергетическая диаграмма
Носителем мощности является магнитный поток Ф (рис. 4.9, а) вращающийся с угловой частотой  и передающий электромагнитный момент
и передающий электромагнитный момент  , поэтому
, поэтому  . Аналогично для ротора
. Аналогично для ротора  , где
, где  – угловая частота вращения ротора. С учетом этого из энергетической диаграммы получаем
– угловая частота вращения ротора. С учетом этого из энергетической диаграммы получаем
 , (4.8)
, (4.8)
 . (4.9)
. (4.9)
Чем ниже частота вращения ротора  (больше скольжение s), тем меньшая часть мощности , передаваемая полем, преобразуется в механическую мощность (4.9) и тем большая часть мощности (4.8) теряется на нагрев ротора (потери скольжения). Поэтому работать с большим скольжением энергетически невыгодно. Обычно
(больше скольжение s), тем меньшая часть мощности , передаваемая полем, преобразуется в механическую мощность (4.9) и тем большая часть мощности (4.8) теряется на нагрев ротора (потери скольжения). Поэтому работать с большим скольжением энергетически невыгодно. Обычно  и потери энергии в двигателе малы.
и потери энергии в двигателе малы.
КПД и коэффициент мощности и их зависимость от механической мощности:
Коэффициент полезного действия. Зависимость  от полезной мощности Р2 имеет такой же характер, как и для трансформатора. Эта зависимость имеет общий характер для большинства электрических машин.
от полезной мощности Р2 имеет такой же характер, как и для трансформатора. Эта зависимость имеет общий характер для большинства электрических машин.
При изменении нагрузки электрической машины отдельные виды потерь изменяются по-разному: электрические потери  в обмотках статора и ротора, а также добавочные потери
в обмотках статора и ротора, а также добавочные потери  изменяются пропорционально квадрату тока нагрузки; электрические потери в щеточном контакте
изменяются пропорционально квадрату тока нагрузки; электрические потери в щеточном контакте  изменяются пропорционально току в первой
изменяются пропорционально току в первой
степени; механические  и магнитные
и магнитные  потери остаются практически постоянными — такими же, как при холостом ходе, если напряжение машины U и частота ее вращения n не изменяются. По этому признаку все виды потерь можно разделить на две группы: постоянные потери
потери остаются практически постоянными — такими же, как при холостом ходе, если напряжение машины U и частота ее вращения n не изменяются. По этому признаку все виды потерь можно разделить на две группы: постоянные потери  , и переменные потери
, и переменные потери  , которые можно приближенно считать пропорциональными квадрату тока нагрузки (обычно величина потерь мала по сравнению с ). Мощность P2, отдаваемая машиной (РЭЛ в генераторах и РМЕХ в двигателях), пропорциональна току нагрузки I в первой степени, поэтому зависимость
, которые можно приближенно считать пропорциональными квадрату тока нагрузки (обычно величина потерь мала по сравнению с ). Мощность P2, отдаваемая машиной (РЭЛ в генераторах и РМЕХ в двигателях), пропорциональна току нагрузки I в первой степени, поэтому зависимость
КПД от тока нагрузки
 (
( )
)
где А, В, С — постоянные.
Из () следует, что при изменении нагрузки электрической машины КПД ее изменяется, При холостом ходе = 0, так как полезная мощность Р2 отсутствует. При увеличении нагрузки КПД возрастает за счет увеличения Р2, но одновременно быстрее, чем Р2, возрастают переменные потери  , поэтому при некотором токе IКР рост КПД прекращается и в дальнейшем начинает уменьшаться. Если взять производную
, поэтому при некотором токе IКР рост КПД прекращается и в дальнейшем начинает уменьшаться. Если взять производную  и приравнять ее нулю, то можно получить условие максимума КПД — имеет место при такой нагрузке, при которой =
и приравнять ее нулю, то можно получить условие максимума КПД — имеет место при такой нагрузке, при которой =  .
.
Обычно при проектировании электрической машины стремятся так распределить потери мощности, чтобы указанное условие выполнялось при наиболее вероятной нагрузке машины, несколько меньшей номинальной. Во вращающихся электрических машинах средней и большой мощности это условие выполняется при нагрузках 60—85% от номинальной.
При увеличении номинальной мощности относительная величина суммарных потерь уменьшается. Следовательно, должен возрастать и КПД машины. Эта закономерность проявляется во всех типах вращающихся электрических машин и в трансформаторах — машины большей номинальной мощности всегда имеют соответственно и больший КПД, и, наоборот, КПД машин малой мощности и микромашин обычно невелик. Так, например, КПД вращающихся электрических машин мощностью свыше 100 кВт составляет 0,92—0,96, мощностью 1—100 кВт —0,7—0,9, а микромашин —0,4—0,6.
КПД асинхронного двигателя можно определить из круговой диаграммы как отношение отрезков. Однако для получения более точных результатов рекомендуется определять КПД путем расчета отдельных видов потерь.
2.3 Способы пуска двигателей в ход:
а) с короткозамкнутым ротором
Для двигателей с короткозамкнутым ротором в промышленных условиях используют прямой пуск, при которых обмотку статора непосредственно подключают к 3фазной сети на ном. напряжение. При этом линейный пусковой ток составляет 4-8 ном. токов (Iп=(4-8)Iном). Однако, для двигателя такой ток не опасен, а промышленные сети на такие токи рассчитаны.
б) с фазным ротором
Для этих двигателей используют резисторный (реостатный) пуск. При этом способе в обмотку ротора включают 3фазный пусковой резистор (реостат), соединенный звездой. Затем обмотку статора подключают к 3фазной сети на ном. напряжение и по мере разгона ротора, пусковой резистор выводят, так что в конце пуска обмотка ротора оказывается замкнутой накоротко.
Введение пускового резистора уменьшает пусковой ток и одновременно увеличивает пусковой момент.
Регулирования частоты вращения, реверсирование:
Для реверсирования двигателя достаточно изменить направление вращения м/поля. Для этого необходимо 2 любых провода, подходящих к обмотке статора поменять местами.
Частота вращения:
n = 
1.Частотное регулирование(t1=var)
Применяется чаще всего для получения частоты вращения более 3000 об/мин. Чтобы в процессе регулирования магнитный поток оставался неизменным, вместе с частотой необходимо изменять и напряжение.

При этом способе регулирования двигатель питают от специального преобразователя частоты и напряжения.
2. Ступенчатое регулирование частоты вращения изменяем число пар полюсов магнитного поля (p=var) Для станочного оборудования электомашиностроители выпускают одно-, трех-, четырех-, скоростные асинхронные двигатели. Статор 2скоростного двигателя содержит 1-у обмотку, которую можно переключить на 2 разных значения (p) (обычно в соотношении 1 к 2)
статор 4скоросного двигателя содержит 2 независимые обмотки с переключением числа полюсов пар.
Рассмотренные способы для двигателей с короткозамкнутым ротором. Для двигателей с фазным ротором применяют 3 способа –резистивное(реостатное) регулировочное. Для этого в обмотку ротора включают 3фазный регулировочный резистор(реостат), по аналогии с пусковым. При этом чем больше сопротивление регулировочного резистора, тем больше становиться механическая характеристика двигателя, тем меньше частота вращения ротора.

Механическая характеристика (4) соответствует режиму Эл. Маг. Тормоза. В точке Т, скольжение
этот режим использует в подьёмно-транспортных устройствах (кран) для опускания груза. При этом ротор вращения в направлении двигателя груза, а маг поле и Эл. Маг. Момент в противоположном направлении. В результате груз опускается медленно под действием разности момента, создаваемого грузом и Эл.Маг. Момента двигателя.
Торможение:
Торможение
Применяют три способа:
- динамическое
-генераторное рекуперативное
-торможение противовключением
Динамическое для быстрой остановки двигателя.Для этого обмотку статора отключают от сети и подключают к источнику постоянного тока. Источник постоянного тока создаёт в обмотке постоянный ток, который создаёт неподвижное магнитное поле. Провода обмотки ротора при своём движений пересекают линии магнитной индукции этого поля и в этих проводах индуцируется ЭДС, которое создает ток. От взаимодействия тока в обмотке ротора с магнитным полем статора, создается электромагнитный тормозной момент, под действии которого ротор тормозится и останавливается.
Генераторное рекуперативное.
Применяют в станочном оборудовании для перехода от большей частоты вращения к меньшей. Для этого, например, увеличивают число полюсов пар полюсов магнитного поля. В результате частота магнитного поля становится меньше частоты вращения ротора. Электромагнитный момент изменяет своё направление и ротор тормозится, а машина работает в режиме генератора. Когда частота вращения ротора сравняется с частотой вращения магнитного поля, машина вновь переходит в двигательный режим, и в новом режиме ротор двигателя будет вращаться с меньшей частотой вращения.
Торможение противовключением.
Для экстренной остановки двигателя, два провода, подходящих к обмотке статора с помощью специальной аппаратуры меняют местами, следовательно, магнитное поле изменяет направление вращения, изменяет направление и электромагнитный момент, следовательно ротор тормозится. Если в момент остановки ротора двигатель не будет отключен от сети, то произойдет реверсирования двигателя.
Особенности двигателей с повышенным пусковым моментом и многоскоростных:
Стремление повысить пусковой момент короткозамкнутых асинхронных двигателей без увеличения активного сопротивления обмотки статора (а следовательно, и потерь энергии в нём) привело к появлению специальных конструкций двигателей, называемых двигателями с повышенным пусковым моментом. К ним относятся двигатели с двоичной беличьей клеткой и с ротором, имеющим глубокие пазы (глубокопазные двигатели).
Паспортные данные двигателей, определение схемы соединения обмотки статора по паспортным данным и напряжению сети:
На паспортной табличке указывают 2 ном. напряжения двигателя Uм/Uб; (220/380В). Если ном. напряжение сети = меньшему ном. напряжению двигателя, то обмотку соединяют ∆, иначе Y. В том и другом случае на каждой фазе двигателя напряжение = меньшему значению.
Для удобства соединения фаз, панель вводного устройства имеет следующий вид.
В каталоге для двигателей с короткозамкнутым ротором указаны: номинальная мощность  (механическая, отдаваемая на валу), номинальное число оборотов
(механическая, отдаваемая на валу), номинальное число оборотов  , частота сети, номинальный КПД
, частота сети, номинальный КПД  , номинальный
, номинальный  , схема соединения статора, номинальное линейное напряжение
, схема соединения статора, номинальное линейное напряжение  и номинальный линейный ток
и номинальный линейный ток  , потребляемый из сети, кратность максимального
, потребляемый из сети, кратность максимального  и пускового
и пускового  моментов, кратность пускового тока
моментов, кратность пускового тока  . Часто в каталогах приводится график механической характеристики. Для фазного двигателя вместо двух последних величин задаются линейное напряжение на кольцах неподвижного разомкнутого ротора
. Часто в каталогах приводится график механической характеристики. Для фазного двигателя вместо двух последних величин задаются линейное напряжение на кольцах неподвижного разомкнутого ротора  и номинальный линейный ток ротора
и номинальный линейный ток ротора  . По этим данным можно определить: активную мощность, потребляемую двигателем как трехфазным приемником из сети,
. По этим данным можно определить: активную мощность, потребляемую двигателем как трехфазным приемником из сети,
 ,
,
полную мощность
 ,
,
реактивную мощность
 .
.
|
|
|
|
|
Дата добавления: 2014-01-06; Просмотров: 1892; Нарушение авторских прав?; Мы поможем в написании вашей работы!