КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Плоская система произвольно расположенных сил и условие ее равновесия
|
|
|
|
Балочные системы.
Лекция №3 Произвольная плоская система сил.
Цель: Изучить произвольную плоскую систему сходящихся сил и ее равновесие.
Воспитательная цель: Закрепить полученные знания практическими примерами.
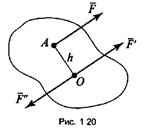 Приведение силы к данной точке заключается в том, что рассматриваемую силу F переносят параллельно самой себе в произвольно выбранную точку О. Для того чтобы механическое состояние тела не изменилось, силу F' уравновешивают силой F" (рис. 1.20). В результате приведения силы F к точке О получилась система сил, состоящая из силы F', равной и параллельной данной силе F, и пары сил (F и F"), момент которой равен моменту данной силы F относительно точки О:
Приведение силы к данной точке заключается в том, что рассматриваемую силу F переносят параллельно самой себе в произвольно выбранную точку О. Для того чтобы механическое состояние тела не изменилось, силу F' уравновешивают силой F" (рис. 1.20). В результате приведения силы F к точке О получилась система сил, состоящая из силы F', равной и параллельной данной силе F, и пары сил (F и F"), момент которой равен моменту данной силы F относительно точки О:
М = M0(F).
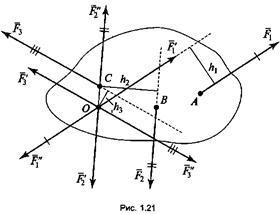 Плоской системой произвольно расположенных сил называется система сил, линии, действия которых лежат в одной плоскости, но не пересекаются в одной точке (рис. 1.21). Для того чтобы привести данную систему произвольно расположенных сил к произвольно выбранной точке О (см. рис. 1.21), необходимо:
Плоской системой произвольно расположенных сил называется система сил, линии, действия которых лежат в одной плоскости, но не пересекаются в одной точке (рис. 1.21). Для того чтобы привести данную систему произвольно расположенных сил к произвольно выбранной точке О (см. рис. 1.21), необходимо:
1) перенести по очереди каждую силу в эту точку;
2) уравновесить силы (F1', F2’, F3’) силами. (F1'’, F2’’, F3’’)
В результате приведения сил (F1, F2, F3) к точке О получили новую систему сил, состоящую из плоской системы сходящихся сил (F1,F2,F3), которые равны и параллельны данным силам, т.е.
F1'= F1, F2,= F2’, F3' = F3 . (1.1)
 Эту вновь полученную систему сходящихся сил (1.1) заменяем равнодействующей силой, которая равна геометрической сумме данных сил и называется главным вектором системы:
Эту вновь полученную систему сходящихся сил (1.1) заменяем равнодействующей силой, которая равна геометрической сумме данных сил и называется главным вектором системы:
В результате приведения получили еще одну систему пар сил

(1.2)
моменты которых равны моментам данных сил
относительно точки О, т.е.
Вновь полученную систему пар сил (1.2) заменим одной равнодействующей парой, момент которой равен алгебраической сумме моментов слагаемых пар сил и называется главным моментом системы:
Таким образом, для того чтобы тело под действием плоской системы произвольно расположенных сил находилось в равновесии, необходимо, чтобы главный вектор и главный момент системы были равны нулю:
 Выразив главный вектор вновь полученной системы сходящихся сил в аналитической форме, получим два уравнения равновесия:
Выразив главный вектор вновь полученной системы сходящихся сил в аналитической форме, получим два уравнения равновесия:

 Главный момент системы заменим алгебраической суммой моментов данных сил относительно точки приведения:
Главный момент системы заменим алгебраической суммой моментов данных сил относительно точки приведения:
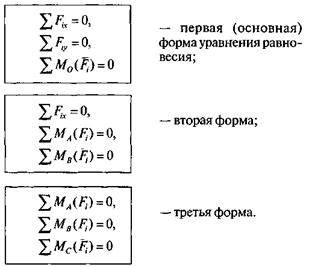
Таким образом, получаем условие равновесия плоской системы произвольно расположенных сил: алгебраическая сумма проекций всех сил на оси х и у должна быть равна нулю и алгебраическая сумма моментов всех сил относительно точки приведения должна быть равна нулю, т.е.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 10651; Нарушение авторских прав?; Мы поможем в написании вашей работы!