КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Пружинные датчики давления
|
|
|
|
Пружинные датчики давления (см. рис. 2) отличаются от пружинных манометров тем, что вместо отсчетного устройства в них имеется электрический преобразователь, который преобразует линейное или угловое перемещение в одну из электрических величин. При использовании параметрических преобразователей (реостатных, индуктивных, трансформаторных, емкостных и др.) выходной электрической величиной является сопротивление R, индуктивность L, взаимоиндуктивность М, емкость С; в случае включения параметрического преобразователя в электрическую цепь с внешним источником питания выходным сигналом может служить напряжение U или сила тока I. В большинстве случаев применяют электрические преобразователи дифференциального типа (рис.9), в которых при перемещении подвижной части одновременно изменяются два однородных параметра, причем когда один из них увеличивается, другой уменьшается. Достоинством дифференциальных преобразователей является возможность уменьшения температурных погрешностей (при включении преобразователя в схему делителя напряжений или в мостовую схему), уменьшение электромагнитных и электростатических сил притяжения между подвижными и неподвижными частями и увеличение чувствительности преобразователя.
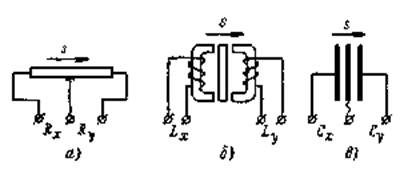
Рис.9. Дифференциальные электрические преобразователи:
а¾ потенциометрический, б¾ индуктивный, в¾ емкостный
Передаточные отношения механизмов в датчиках давления обычно имеют меньшую величину, чем в манометрах, так как они выбираются не из условия обеспечения точного визуального отсчета показаний, а с целью удобства преобразования перемещения в электрический сигнал. Выбор передаточного отношения определяется типом электрического преобразователя. Наибольшее передаточное отношение требуется при использовании реостатных и потенциометрических преобразователей, в которых ход щетки должен быть достаточно велик, чтобы относительная величина витковой погрешности не превышала допустимого значения. В случае применения поворотных индуктивных трансформаторов и емкостных преобразователей с переменной площадью полюсов или электродов передаточное отношение может быть значительно уменьшено по сравнению с реостатными и потенциометрическими устройствами. Наконец, при использовании индуктивных и емкостных преобразователей с переменным рабочим зазором, а также тензометрических преобразователей, передаточно-множительный механизм может вообще отсутствовать, так как преобразователи этого типа обладают достаточной чувствительностью для непосредственного преобразования малого перемещения чувствительного элемента в электрический сигнал нужной величины. Однако при отсутствии передаточно-множительного механизма возникает проблема предохранения измерительной системы от влияния инерционных сил, действующих вдоль оси чувствительного элемента при полете с ускорением или при наличии вибрации. Компенсация погрешностей, вызываемых влиянием инерционных сил, возможна следующими способами:

Рис.10.Схемы компенсации погрешностей от инерционных сил
а) уравновешиванием инерционной массы подвижных частей упругого элемента и преобразователя с помощью противовеса, присоединенного через вспомогательную кривошипно-шатунную передачу, которая может не участвовать в функциональных преобразованиях, а выполнять лишь роль носителя противовеса (рис. 10,а);
б) встречным соединением двух чувствительных элементов через двойную кривошипно-шатунную передачу так, чтобы моменты инерционных сил взаимно уравновешивались, а моменты полезных сил (сил давления) суммировались (см. рис.10,6);
в) применением двух механически не связанных между собой чувствительных элементов с электрическими преобразователями, так соединенными, чтобы их электрические сигналы от действия инерционных сил взаимно компенсировались, а сигналы от действия сил давления суммировались (см. рис. 10, в).

Рис.11. Кинематическая схема пружинного датчика давления с потенциометрическим преобразователем:
1¾ мембрана; 2¾ герметичный корпус; 3¾ шток; 4¾ потенциометр; 5¾ щетки потенциометра; 6¾ штепсельный разъем; 7¾ щеткодержатель; 8¾ пластина; 9¾ ось; 10¾ токоподводящая пружина; 11¾ рычаг; 12¾ штуцер
Кинематическая схема унифицированного датчика с мембранным чувствительным элементом, синусным передаточно-множительным механизмом и потенциометрическим выходным преобразователем изображена на рис.11. Диапазон измерения может изменяться в пределах от 0—1 до 0—100 ат и более. Стандартность конструкции механизма датчика обеспечивается тем, что при переходе от одного диапазона к другому изменяют только толщину мембраны, которая так подбирается, чтобы при любом диапазоне измерения ее прогиб был одинаковым (порядка 1 мм).
Вариант конструкции унифицированного датчика давления с индуктивным преобразователем показан на рис. 12.
Датчики давления, выдающие электрический сигнал при достижении контролируемого давления заданного значения, называются, сигнализаторами давления. Конструкция унифицированного электромеханического сигнализатора давления с контактным преобразователем приведена на рис. 13.
3. Расчет характеристик пружинных манометров и датчиков давления
Рассмотрим методику расчета статических и динамических характеристик пружинных манометров и датчиков давления.
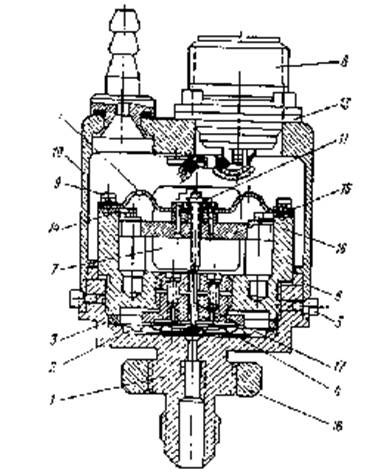
Рис.12. Конструкция датчика давления с индуктивным преобразователем:
1¾ корпус; 2¾ мембрана; 3¾ кольцо; 4¾ упор; 5¾ винт; 6¾ прокладка; 7¾ катушка; 8¾ вилка; 9¾ винт; 10¾ кожух; 11¾гайка; 12¾ пружина; 13¾ прокладка; 14¾ винт; 15¾ якорь; 16¾ крышка приемного узла; 17¾ шток; 18¾ контргайка
На рис.14 представлена структурная схема датчика абсолютного давления, отображающая процесс преобразования измеряемого давления р1 в выходной электрический сигнал U. Звенья структурной схемы выполняют следующие функции.
Звено 1 преобразует измеряемое давление р1 в давление p1¢; действующее в корпусе манометра; в этом звене учитывается запаздывание имеющее место при передаче давления по трубопроводу. Звено 2 преобразует давление р1¢ в движущую силу Рдв; это звено отображает силовую характеристику чувствительного элемента. Звено 3 преобразует
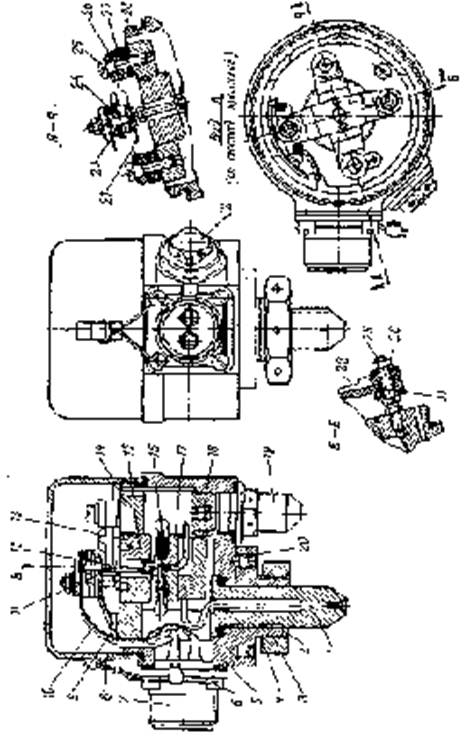
Рис.13. Конструкция унифицированного сигнализатора давления:
1¾ трубопровод; 2, 26¾ втулки; 3, 19¾штуцера; 4¾ гайка; 5¾ основание; 6, 9, 20, 25 ¾ винты; 7¾ штепсельная вилка; 8¾ корпус; 10¾ провод; 11¾ наконечник; 12¾ центр; 13¾ упор; 14¾ кронштейн; 15¾ шток; 16¾ мембранная коробка; 17¾ прокладка; 18¾ заглушка с сеткой; 21¾ нижняя пружина; 22¾ верхняя пружина; 23, 24¾ контакты; 27, 28¾ кольца; 29¾ шпилька; 30¾ гайка; 31¾ платинка; 32¾ заглушка
силу Рдв в линейное перемещение S подвижной системы; это звено учитывает упругие и демпфирующие свойства и инерционные массы всех подвижных частей как чувствительного элемента, так и передаточно-множительного механизма. Звено 4 осуществляет преобразование линейного перемещения S в угловое перемещение j; звено 4 отображает уравнение кинематики передаточно-множительного механизма. Звено 5 (потенциометр, индуктивный преобразователь и т. п.) преобразует угловое перемещение j в электрическую величину Z.
При расчете статической характеристики манометра структурную схему можно упростить, поскольку для установившегося режима измерения р1¢=р1, кроме того, демпфирующие и инерционные силы отсутствуют; это позволяет объединить звенья 1, 2 и 3 и рассматривать их как единое звено, осуществляющее преобразование р1 в S в соответствии со статической характеристикой упругого чувствительного элемента (см. пунктир на рис.14):
S=¦1-3(p1).
Решая это уравнение совместно с уравнениями звеньев 4 и 5
j=¦4(S);
Z=¦5(j),
получим статическую характеристику датчика:
Z=¦5í¦4[¦1-3(p1)]ý.
Чувствительность
S=S1-3*S4*S5,
где S1-3=  ¾ чувствительность упругого элемента;
¾ чувствительность упругого элемента;
S4=  ¾ чувствительность (передаточное отношение) механизма;
¾ чувствительность (передаточное отношение) механизма;
S5=  ¾ чувствительность электрического преобразователя перемещений.
¾ чувствительность электрического преобразователя перемещений.
Для получения равномерной шкалы необходимо, чтобы S=const, что возможно в двух случаях:
1. Преобразующие звенья - чувствительный элемент, механизм и электрический преобразователь обладают линейной характеристикой, т. е. S1-3=const, S4=const и S5=const.
2. Нелинейность характеристики чувствительного элемента компенсируется нелинейностью механизма и электрического преобразователя так, что в любой точке шкалы S1-3= .
.
Для нахождения передаточной функции датчика предварительно определим передаточные функции звеньев структурной схемы на рис.14.

Рис.14. Структурная схема датчика абсолютного давления:
1¾ звено, отображающее процесс передачи давления по трубопроводу; 2¾звено, отображающее силовую характеристику упругого чувствительного элемента; 3¾ упругая подвижная система; 4¾ передаточно-множительный механизм; 5¾ потенциометр
Передаточная функция звена 1, преобразующего р1 в р1’, следует из линеаризованного дифференциального уравнения процесса передачи давления по трубопроводу, которое может быть получено следующим образом.
Масса воздуха, находящегося в корпусе манометра:
m1=u*r кг, (1)
где u ¾ объем воздуха внутри корпуса в м3,
r ¾ плотность воздуха в кг/м3.
Уравнение состояния газа
r= н/м3, (2)
н/м3, (2)
где R ¾ газовая постоянная в м/град;
T ¾ температура воздуха внутри корпуса в °К;
g=9.81 м/сек2.
Подставив (2) в (1), получим
m1= . (3)
. (3)
Продифференцируем выражение (3), считая при этом приближенно u=const и T=const:
 . (4)
. (4)
Согласно закону Пуазейля массовый расход воздуха через трубопровод при ламинарном потоке
 , (5)
, (5)
где rср ¾ средняя плотность воздуха в трубопроводе в кг/м3;
кист= ¾ коэффициент истечения в м5/н·сек;
¾ коэффициент истечения в м5/н·сек;
d ¾ диаметр трубопровода в м;
l ¾ длина трубопровода в м;
m ¾ вязкость воздуха в н·сек/м2.
Приравнивая правые части выражений (4) и (5), получим
 ,
,
или (6)
 .
.
В выражении (6) можно заменить RT1gρср=рср,, где рср¾ среднее давление воздуха в трубопроводе в н/м2.
Тогда
 .
.
Обозначив далее постоянную времени
To= , (7)
, (7)
получим в окончательном виде дифференциальное уравнение звена 1:
 (8)
(8)
Если приближенно считать То=const (пренебрегая изменением u, рср и кист), то передаточная функция звена 1 будет
W1(p)= . (9)
. (9)
Если внутренний объем трубопровода соизмерим с объемом корпуса датчика, то при определении постоянной времени То величину u следует приближенно брать равной сумме внутреннего объема корпуса и половине внутреннего объема трубопровода.
При использовании длинных трубопроводов следует учитывать также нелинейное запаздывание Т1, которое равно времени прохождения звуковой волны от начала трубопровода к концу:
 ,
,
где а ¾ скорость звука в м/сек.
При этом передаточная функция звена 1 будет
 . (10)
. (10)
Передаточная функция звена 2 определяется из линеаризованного уравнения силовой характеристики чувствительного элемента:
 н,
н,
где F ¾ эффективная площадь чувствительного элемента в м2, откуда передаточная функция звена 2 будет
 (11)
(11)
Передаточная функция звена 3 (подвижной системы) определяется по формуле
 . (12)
. (12)
При использовании этой формулы следует иметь ввиду, что в качестве воздушного демпфера здесь служит чувствительный элемент, который можно рассматривать как поршень с площадью F, равной эффективной площади сильфона, и объёмом u, равным внутреннему объему сильфона. В качестве капилляра, через который происходит истечение воздуха из демпфера, используется трубопровод (или дополнительное дросселирующее отверстие, расположенное на входе в чувствительный элемент) диаметром d b длинной l. Вычисление параметров Tu и kд, входящих в выражение (12), следует вести по формулам
 (*)
(*)
 , (**)
, (**)
где
рср=0.5(р1+р’1); кист= .
.
Входящий в формулу (12) параметр сж представляет собой приведенный коэффициент линейной жесткости, учитывающий жесткость упругого чувствительного элемента и жесткость дополнительной пружины, выбирающей люфты. Параметр m ¾ это приведенная масса подвижной системы.
Передаточная функция звена 4 определяется из линеаризованного уравнения кинематики механизма
j=S4s,
где S4 ¾ передаточное отношение механизма в рад/м.
Отсюда передаточная функция звена 4
 . (13)
. (13)
Передаточная функция звена 5 определяется из уравнения электрического преобразователя Z=S5j, откуда
 . (14)
. (14)
Общая передаточная функция датчика давления

или с учетом выражений (10)¾(14)
 .
.
Если сравнить между собой постоянные времени То и Т, определяемые по формулам (7) и (*), нетрудно заметить, что для изотермического процесса То=Т; учитывая это обстоятельство и пренебрегая постоянной времени Т1 ввиду ее малости, получим упрощенное выражение передаточной функции датчика давления в виде
 . (15)
. (15)
Необходимо иметь ввиду, что приведенные расчеты выполнены без учета сухого трения, действующего в механизме прибора.
Расчет с учетом сухого трения показывает, что при свободных колебаниях системы 2-го порядка затухание колебаний за один период не зависит от частоты и равно 4D, где D — зона застоя прибора. Поэтому сухое трение особенно эффективно гасит колебания на больших частотах. Так, при включении давления воздуха колебания стрелки манометра, имеющего собственную частоту 500 гц и зону застоя 0,5%, за каждый период будут уменьшаться на 2% и полностью затухать через 50 колебаний, т. е. за 0,1 сек.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1139; Нарушение авторских прав?; Мы поможем в написании вашей работы!