КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Показатели качества переходного процесса
|
|
|
|
На переходные процессы в системах управления накладываются определенные ограничения, связанные с особенностями их работы.
Рассмотрим основные показатели качества систем управления, пользуясь характеристикой переходного процесса отработки единичного задающего воздействия g(t)=1(t), показанной на рис.6.2.
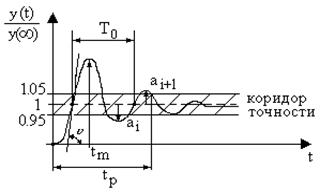
Рис. 6.2. Характеристики переходного процесса
при типовом единичном воздействии
Для оценки качества работы системы введены следующие показатели.
1. Максимальное отклонение управляемой величины, соответствующее времени tm, от установившегося значения:
 , (6.16)
, (6.16)
где tm - время установления первого максимума управляемой величины, характеризующее скорость изменения ее в переходном процессе.
Представляет собой динамическую ошибку Dдин, определяющую точность системы в переходном процессе.
2. Перерегулирование, равное отношению максимального значения управляемой величины в переходном процессе к установившемуся значению:
 . (6.17)
. (6.17)
Перерегулирование характеризует склонность системы к колебаниям, то есть близость системы к колебательной границе устойчивости. В конечном итоге характеризует запасы устойчивости. Считается, что запас устойчивости достаточен, если s лежит в пределах от 10 до 30%.
3. Время регулирования (протекания переходного процесса) tр. Позволяет оценить быстродействие системы управления.
Учитывая, что полное затухание в системе происходит лишь при t®¥, длительность переходного процесса ограничивают тем моментом времени, когда
 , (6.18)
, (6.18)
где D - допустимое значение установившейся ошибки, обычно составляющее ±5% от y(¥).
4. Число колебаний управляемой величины y(t) за время регулирования tр. Это число составляет обычно 2¸3.
5. Собственная частота колебаний системы w0 = 2p/T0, где T0 - период собственных колебаний системы.
6. Логарифмический декремент затухания системы dс, характеризующий быстроту затухания колебательного процесса,
dс = ln  , (6.19)
, (6.19)
где ai и ai+1 - две амплитуды для рядом расположенных экстремумов кривой переходного процесса.
7. Максимальная скорость отработки управляемой величины
 = tgn.
= tgn.
Для каждой системы управления, имеющей колебательный переходный процесс, на основе указанных критериев качества можно установить область допустимых отклонений управляемой величины.
В системах автоматического управления возможны переходные процессы, характер протекания которых отличен от указанного на рис.6.2. Все многообразие переходных процессов в системах автоматического управления можно разделить на четыре группы:
колебательный процесс, характеризуемый несколькими значениями колебаний управляемой величины за время регулирования;
малоколебательный процесс, т.е. переходный процесс с одним колебанием;
монотонный процесс, когда скорость изменения управляемой величины не меняет знака в течение всего времени регулирования (dy/dt³0 при 0£ t£tр);
апериодический процесс (без перерегулирования), когда y(t)<y(¥) c точностью до D при всех t.
Таким образом, чтобы оценить качество работы системы управления, необходимо иметь ее переходную характеристику, для нахождения которой применяются различные способы:
а) классическое математическое решение дифференциального уравнения D(p)y(t)=Q(p)1(t);
б) операционный метод:  ;
;
в) численные и графические способы;
г) моделирование системы;
д) экспериментальная запись.
Если задающее воздействие на входе линейной системы отличается от единицы, то в переходном процессе изменяется только масштаб управляемой величины.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 612; Нарушение авторских прав?; Мы поможем в написании вашей работы!