КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Общие методы повышения точности систем управления
|
|
|
|
СИСТЕМ УПРАВЛЕНИЯ
ТОЧНОСТЬ И ЧУВСТВИТЕЛЬНОСТЬ
вопросы
К числу общих методов повышения точности работы систем управления относятся:
1) увеличение общего коэффициента передачи разомкнутой системы;
2) применение управления по производным от ошибки;
3) повышение степени астатизма.
Увеличение общего коэффициента передачи k разомкнутой цепи является универсальным и эффективным методом повышения точности и быстродействия системы. При этом, что следует из раздела 6.2, уменьшаются все виды установившихся ошибок системы. Увеличение k осуществляется последовательным введением усилительного звена в прямую цепь системы. Иногда это достигается путем повышения коэффициентов передачи отдельных звеньев.
Однако увеличение общего коэффициента передачи ограничивается, как видно из раздела 5, устойчивостью системы. В этом сказывается противоречие между требованиями к точности и устойчивости системы. Поэтому увеличение общего коэффициента передачи до значения, при котором обеспечивается требование к точности системы, может производиться при одновременном повышении запаса устойчивости с помощью введения корректирующих устройств.
Введение управления по производным от ошибок. Это простейший метод улучшения качества работы системы. Структурно введение производной показано на рис.7.1. Технически это реализуется различными дифференцирующими звеньями.
Передаточная функция разомкнутой системы в этом случае будет
W(s) = (Tд s+1)WR(s)WОУ(s), (7.1)
где WОУ(s) - передаточная функция объекта управления;
WR(s) - передаточная функция регулятора;
Tд - постоянная времени дифференцирующего звена.
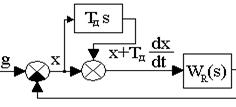
Рис.7.1. Структурная схема системы управления
при введении производных от ошибок
Введение дифференцирующих звеньев в систему добавляет положительную фазу и, следовательно, повышает запас устойчивости системы, что дает возможность увеличить общий коэффициент передачи k и тем самым улучшить точность управления.
Кроме того, введение управления по производным позволяет системе чувствовать не только наличие ошибки, но и тенденцию к изменению ее величины, то есть делает работу системы с “предвидением”, что обеспечивает повышение быстродействия и снижение динамической ошибки системы, тем самым улучшая качество переходного процесса.
Так как дифференцирование эквивалентно дополнительному усилению высоких частот, то использование более двух дифференцирующих звеньев затруднительно вследствие возрастания влияния высокочастотных помех.
Введение интеграла от ошибки является методом создания или повышения степени астатизма системы управления, а значит, и увеличения ее точности. При астатическом управлении W(0)®¥. В связи с этим передаточную функцию разомкнутой системы можно представить в виде
W(s) =  , (7.2)
, (7.2)
где W1(0)= k;
k - коэффициент передачи разомкнутой системы;
r - степень астатизма системы.
При r=0 система называется статической, при r=1 - астатической первого порядка и т.д.
Физически повышение степени астатизма достигается за счет введения в систему управления интегрирующих звеньев.
Введение интегралов от ошибки используется для устранения установившихся ошибок в различных типовых режимах: в неподвижном положении, при движении с постоянной скоростью, при движении с постоянным ускорением и т.д. Формально это сводится к тому, чтобы сделать равными нулю первые коэффициенты ошибок системы, например, с0=0 при r=1, с0=с1=0 при r=2, с0=с1=с2=0 при r=3 и т.д.
Однако включение каждого интегратора в прямую цепь системы вносит отрицательный фазовый сдвиг -900, ухудшая тем самым устойчивость и качество переходного процесса. В случае введения двойного интеграла система становится структурно неустойчивой (неустойчивой при любых значениях параметров).
Таким образом, повышение степени астатизма неблагоприятно сказывается на устойчивости и качестве переходного процесса системы. Поэтому одновременно с повышением степени астатизма в системе приходится использовать корректирующие устройства.
Пример. Определить установившиеся ошибки от задающего воздействия g(t)=g1´t системы, передаточная функция разомкнутой цепи которой имеет вид
 .
.
Решение. Изображение по Лапласу задающего воздействия G(s)=g1/s2.
Установившаяся ошибка от задающего воздействия для статической системы при r=0:
для астатической системы первого порядка при r=1:
для астатической системы второго порядка при r=2:
 .
.
Включение в систему изодромных устройств. Изодромное звено, представляющее собой комбинацию интегрирующего звена и форсирующего звена первого порядка, имеет передаточную функцию вида
 , (7.3)
, (7.3)
где TИ - постоянная времени;
kи =  - коэффициент передачи изодромного устройства.
- коэффициент передачи изодромного устройства.
Изодромное устройство, объединяя в себе введение интеграла и производной, лишено недостатков предыдущего звена и позволяет получить необходимую степень астатизма системы, сохраняя устойчивость и качество. Это устройство изменяет лишь низкочастотную часть амплитудной частотной характеристики, влияющую на точность системы (повышает ее), а отрицательный сдвиг фазы на частоте среза, существенный для условия устойчивости, невелик при соответствующем выборе постоянной времени TИ.
Структурная схема системы управления при введении изодромного устройства представлена на рис.7.2.
Из структурной схемы следует, что если в случае простого введения интеграла управление в системе производится только по интегралу от ошибки, то при изодромном устройстве получаем управление как по ошибке, так и по интегралу от ошибки.
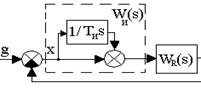
Рис. 7.2. Структурная схема системы с изодромным устройством
Для дальнейшего повышения степени астатизма системы можно использовать не одно, а два, три и т.д. изодромных устройств.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 392; Нарушение авторских прав?; Мы поможем в написании вашей работы!