КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Визначення зведеного моменту навантаження
|
|
|
|
При підійманні вантажу до виконавчого органу від ЕП необхідно прикласти механічну потужність:

Запишемо баланс потужностей навантаження ЕП в реальній і розрахунковій схемах:
де:  - результуючий К.К.Д.
- результуючий К.К.Д.

Якщо розділити обидві частини на  , отримаємо:
, отримаємо:
 |
Розділ 2. Електропривод з двигунами постійного струму.
2.1 Електропривод з двигунами постійного струму незалежного збудження(ДПСНЗ)
Схема вмикання і статичні характеристики ДПСНЗ
Рис.2.1. Схема вмикання ДПС НЗ
В схемі прийняті такі позначення:
I – cтрум в колі якоря (струм навантаження)А;
I з – струм в колі збудження, А;
U – напруга живлення якоря, В;
Е – Е.Р.С. якоря, В;
R я = R о.я + R д.п. + R к.o.+ R щ. – опір якоря, ОМ.
Механічна і електромеханічна характеристика ДПС НЗ
Математичний вираз характеристик двигуна отримаємо, виходячи із співвідношень, які зв`язують параметри машини.
1.Рівняння рівноваги напруг в колі якоря:
U=E + I . R,де (1)
U – напруга живлення кола якоря;
E – Е.Р.С., яка наводиться в обмотці якоря при його обертанні;
R – повний опір в колі якоря;
R = Rя + Rд
2.Рівняння електрорушійної сили якоря
 |
E = к . Ф . ω,де (2)
 - конструктивний коефіцієнт двигуна;
- конструктивний коефіцієнт двигуна;
Ф – магнітний потік, який створюється обмоткою збудження, Вб;
ω - кутова швидкість двигуна, рад/с.
3.Рівняння електромагнітного моменту(рушійного моменту) двигуна
М = k. Ф . І, де (3)
М- рушійний момент двигуна, який обертає якорь, а з ним і робочу машину
4.Підставивши (2) в (1) отримаємо формулу електромеханічної характеристики
 (4)
(4)
5.Формулу для механічної характеристики отримаємо із формули (4) з використанням виразу (3)
 (5)
(5)
Рівняння 4 – 5 можуть мати спрощений вигляд
ω = ωо - ∆ω, де (6)
ω- поточне значення швидкості ДПСНЗ;
ωо - швидкість ідеального холостого ходу;


∆ω - зміна швидкості:
Із рівнянь 4 – 5 ми бачимо лінійну залежність швидкості від струму ω = f (I)і швидкості від моменту ω = f (M).



Рис.2.2.Статичні характеристики ДПС НЗ
З виразу (1) отримаємо загальну формулу для струму в колі якоря:
 (7)
(7)
Всі величини з формул 1 – 7 поділяються на:
1. Параметри: - напруга живлення якоря, U;
- магнітний потік,Ф;
- додатковий опір в колі якоря, Rд.
2. Координати: -швидкість,
- струм в колі якоря,I;
- момент, М;
- Е.Р.С.,Е.
2.2 Енергетичні режими роботи двигуна постійного струму з незалежним збудженням
Енергетичний режим роботи двигуна залежить від механічних М,ω і електричних Е,I координат двигуна, які визначають його механічну Р =Мω і електромеханічну Ре.м. = ЕI потужності.
1. Режим ідеального холостого ходу (точка характеристика точка А).Двигун не одержує енергії ні з живильної електромережі (за винятком електроенергії на збудження)
I = 0; E = U; M = 0; ω = ωо
При ідеальному холостому ходу дорівнює нулю струм і момент, а при короткому замиканні – е.р.с. і швидкість.
2. Режим короткого замикання точка В здійснюються тоді, коли
ω= 0, Е = 0. Згідно з формулою I = Iк.з = U/R, електроенергія при цьому надходить з мережі і витрачається на нагрівання якоря і резисторів кола.
М=Мк.з.=kФІк.з.
3. Двигунний режим, який має місце у першому квадранті, при 0<ω< ωо , де ω і М одного напрямку. В цьому режимі (Е)<(U); струм I = (U - E) / R і напруга U мають однаковий напрямок, а е.р.с. якоря – протилежний. Електрична енергія надходить з електричної мережі, а механічна – віддається з вала двигуна до робочої машини.
4. Генераторний режим роботи паралельно з електричною мережею або рекуперативне гальмування здійснюється тоді, коли при незмінній схемі вмикання двигуна його якір під дією активного моменту статичних опорів робочої машини обертається з швидкістю, більшою за швидкість холостого ходу ω > ωо.При цьому е.р.с якоря вища за прикладену напругу, тому струм в якорі і момент, який розвивається двигуном, змінюють свій напрямок. Двигун працює, як генератор паралельно з електричною мережею.
Е>U; I<0; M<0.
Графічно ці характеристики зображуються прямими лініями, які є продовженням характеристик двигуннуго режиму в зоні другого квадранта
Рекуперативне гальмування економічне, оскільки супроводжується перетворенням механічної енергії, що надходить з вала робочої машини, в електричну енергію, яка віддається (крім втрат у двигуні) в електричну мережу. Перехід з двигунного режиму в гальмівний відбувається плавно без перемикань у колі якоря і колі збудження двигуна. Його застосовують, наприклад, у приводах підйомних і транспортних механізмів. Застосування рекуперативного гальмування обмежується тим, що для його здійснення двигун повинен обертатися з швидкістю, вищою за швидкість ідеального холостого ходу, а це не завжди можливо.
5. Режим генератора послідовно з електричною мережею або режим гальмування проти вмиканням здійснюється в тих випадках, коли напрямок дії обертального моменту електродвигуна протилежний напрямку обертання його якоря.
Гальмування проти вмиканням характерний для електроприводів машин з реактивним моментом статичних опорів і здійснюється шляхом зміни полярності напруги, підведеної до якоря двигуна, що працює в двигунному режимі. Це призведе до зміни напрямків струму в двигуні і дії електромагнітного моменту. Поки напрямок обертання не змінився (якір під дією кінетичної енергії системи двигун - машина продовжує обертатися в попередньому напрямку), електромагнітний момент двигуна діє в протилежному відносно обертанню напрямку, тобто гальмує привод. і в цьому випадку напруга живильної мережі і е.р.с діють узгоджено.
Графічно ці характеристики зображуються прямими лініями, що лежать у квадранті II. Після зупинки (точка F) двигун треба вимкнути з електромережі, інакше він знову перейде у двигун ний режим і будеобертати машину впротилежному напрямку.
Позитивними якостями гальмуванням проти вмиканням ДПС НЗ є: значна інтенсивність гальмування до повної зупинки: висока надійність гальмування при будь-якій кутовій швидкості обертання якоря двигуна; наявність гальмівною моменту при нерухомому двигуні
Основним недоліком цього способу гальмування є значні зусилля на передавальний пристрій і вал двигуна.
6. Режим генератора незалежного від мережі або режим динамічного гальмування ДПС НЗ створюється, якщо якір двигуна, що обертається, вимкнути з мережі живлення і замкнути на зовнішній опір або накоротко (відзначимо, що заперечування накоротко якоря двигуна не означає для нього режиму короткого замикання). Обмотка збудження залишається під'єднаною до мережі - незалежне збудження або паралельно якорю двигуна -самозбудження. Двигун працює як генератор, перетворюючи механічну енергію, що надходить від вала робочої машини (за рахунок кінетичної енергії двигуна і механізму або потенційної енергії вантажу, що опускається), в електричну енергію, яка потім витрачається на нагрівання якоря двигуна і гальмівного опору.
Оскільки якір двигуна вимикається з мережі, то
Механічні характеристики є прямими лініями які, незалежно від величини опору, проходять через початок координат ω = 0, М = 0. Жорсткість характеристик при сталому потоці збудження цілком залежить від гальмівного опору Rд.г.
|
 |
Рис.2.3.Схема вмикання ДПС НЗ при динамічному гальмуванні
Таблиця 2.1 Режими роботи ДНС НЗ
| Режим | Координати | Квадрант | |
| механічні | електричні | ||
| Двигунний | М>0; ω>0 М<0; ω<0 | Е<0; I >0 E>0; I <0 | I III |
| Генераторний | М>0; ω>0 М<0; ω>0 | Е>0; I >0 E<0; I <0 | IV II |
| Ідеальний холостий хід | M = 0; ω = ωо | E = U; I =0 | |
| Коротке замикання | M = Mк.з.; ω = 0 | E =0; I =Ik |
На основі таблиці розглянемо режими роботи ДПС НЗ на різних ділянках його характеристик при додатній полярності напруги.
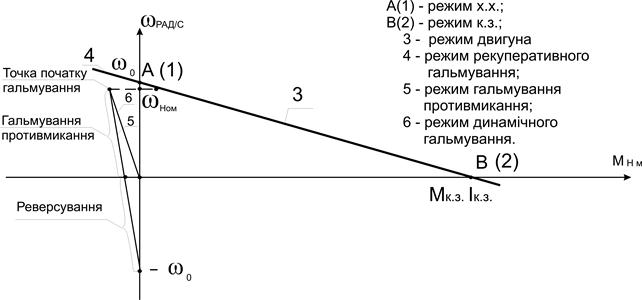
Рис.2.4 Графіки характеристик для відповідних режимів ДПС НЗ
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1158; Нарушение авторских прав?; Мы поможем в написании вашей работы!