КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Переносные и ориентирующие степени подвижности манипулятора
|
|
|
|
Для обеспечения пространственного движения схвата в общем случае достаточно трех переносных степеней подвижности робота, расположенных относительно друг друга определенным образом. Основными минимальными (необходимыми) условиями обеспечения пространственного движения схвата в манипуляторе, образованного парами 5-го класса, являются:
1) наличие двух вращательных пар с непараллельными осями (обычно оси в этом случае перпендикулярны друг другу) и третьей вращательной или поступательной пары, обеспечивающей изменение радиуса сферы (рис. 2.4а);
2) наличие двух вращательных пар с параллельными осями и третьей поступательной пары, направляющая которой не перпендикулярна осям вращательных пар, или вращательной пары, ось которой не параллельна осям предыдущих пар (рис. 6.4б);
3) наличие двух поступательных пар с непараллельными направляющими и одной вращательной пары (рис. 6.4в), ось которой не перпендикулярна плоскости, образованной осями направляющих поступательных пар, или поступательной пары, направляющая которой не параллельна названной плоскости (обычно направляющие перпендикулярны друг другу, а ось вращательной пары параллельна плоскости).
|
|
|
Рис. 2.4. Переносные движения манипулятора
Приведем основные манипуляционные системы, обеспечивающие переносные движения схвата манипулятора при различной последовательности использования вращательных и поступательных кинематических пар.
1. Вращательная – вращательная – вращательная (ВВВ)
А)
2. Поступательная – вращательная – вращательная (ПВВ)
Б)
3. Вращательная – поступательная –(вращательная ВПВ)
В)
4. Вращательная – вращательная – поступательная (ВВП)
 Д)
Д)
5.Поступательная – вращательная – поступательная
6.Вращательная – поступательная – поступательная (ВПП)
Е),
7.Поступательная – поступательная – вращательная (ППВ)
8.Поступательная – поступательная – поступательная (ППП)
Ж)
Не все приведенные схемы обеспечивают совершенно различные рабочие зоны. В некоторых случаях перестановка поступательной и вращательной пары не влияет на форму рабочей зоны, например схемы Б, В и Г имеют одинаковые рабочие зоны. Однако на динамику манипулятора это оказывает существенное влияние, а следовательно, и на характер управляющих воздействий. Более предпочтительной по энергетическим затратам из трех упомянутых является схема Г, так как для вертикального перемещения груза в этой схеме не требуется перемещение промежуточных звеньев.
Схемы А, Г, Д, Е и Ж являются наиболее распространенными и по ним выполнено большинство промышленных роботов.
Переносные степени подвижности удобно классифицировать по системе координат, которую обеспечивает та или иная комбинация кинематических пар манипулятора.
Различают четыре основные системы координат манипуляторов:
1. Цилиндрическая:
2. Сферическая:
3. Прямоугольная:
4. Ангулярная (угловая):
Если в заданной точке рабочего пространства манипулятора его схват должен иметь вполне определенную ориентацию, то манипулятор необходимо снабдить тремя ориентирующими степенями подвижности. Хотя в промышленных роботах обычно обходятся одной – двумя ориентирующими степенями подвижности.
Чтобы не вносить помехи в положение схвата или свести их к минимуму, ориентирующие степени подвижности делают так, чтобы они как можно меньше перемещали схват.
Манипуляционные системы, обеспечивающие ориентирующие движения схвата.
1. Обеспечение полной пространственной ориентации схвата:
2. Ротация с дополнительным пространственным движением схвата:
3. Ротация схвата:
4. Без ориентирующих степеней подвижности (в этом случае оборудование расставляется так, чтобы рука робота оказывалась в требуемом относительно него положении).
Твердые тела, входящие в состав исполнительного механизма и являющиеся функциональными элементами его кинематической цепи называются звеньями. Звено исполнительного механизма конструктивно может состоять из нескольких деталей, не имеющих между собой относительного движения.
Соединение двух соприкасающихся звеньев, допускающих их относительное движение, называется кинематической парой. Совокупность поверхностей, линий и точек звена, входящих в соприкосновение (контакт) с другим звеном пары, называется элементом пары. Для того, чтобы элементы пары находились в постоянном соприкосновении, пара должна быть замкнута геометрическим (за счет конструктивной формы звеньев) или силовым (силой тяжести, пружиной, силой давления жидкости или газа и т.п.) способом.
Контактирующие поверхности, линии и точки звеньев, являющиеся элементами кинематической пары, могут образовывать простые и сложные кинематические пары. В простой кинематической паре (рис. 2.2 а) контактируют только два элемента 1 и 2, которые определяют соответствующее число компонент реакций связей. В сложной паре (рис. 2.2 б) необходимые геометрические связи дублируются дополнительными связями 11 и 21. Дополнительные элементы кинематических пар вводят для уменьшения давления и износа контактирующих поверхностей за счет перераспределения реактивных сил и увеличения размеров элементов кинематических пар.
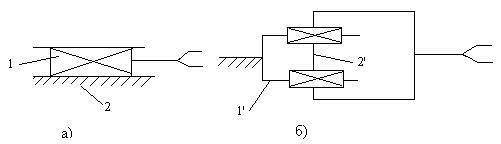
Рис. 2.3. Кинематические пары: а) простые, б) сложные
Если помимо необходимых элементов кинематической пары, обусловленных требуемыми геометрическими связями, при конструировании используют дополнительные элементы, то в такой сложной кинематической паре могут появиться избыточные локальные связи. При наличии избыточных локальных связей относительное движение звеньев либо становится невозможным (заклинивание, защемление элементов), либо осуществляется за счет деформации звеньев, увеличенных зазоров между реальными поверхностями элементов или их износа.
Чтобы кинематическая пара была работоспособной и надежной в эксплуатации, предъявляют определенные требования к размерам, форме и относительному положению ее элементов. Обычно указывают пределы отклонений от заданных или требуемых геометрических форм и расположения поверхностей, осей или точек.
Схема кинематической пары, отражающая только необходимое число геометрических связей, соответствующее вид} пары называется основной. Схема кинематической пары, отражающая как необходимые, так и избыточные локальные (дополнительные) связи, называется действительной. Избыточные локальные связи вносят статическую неопределимость.
Число избыточных локальных связей в реальной конструкции пары называется степенью статической неопределимости кинематической пары. Применение сложных кинематических пар с избыточными локальными связями возможно при достаточной жесткости звеньев, когда их деформация при воздействии нагрузок не приводит к заклиниванию элементов кинематических пар или их повышенному изнашиванию.
Исполнительные механизмы, удовлетворяющие требованиям приспособляемости к деформациям звеньев, надежности, долговечности и технологичности конструкции, обладают оптимальной структурой.
Оптимальная система расположения элементов кинематической пары - понятие относительное: конструкция оптимальная для одних условий, может быть неприемлемой для других. Часто это связано с технологичностью, как совокупностью свойств конструкции, проявляемых при оптимальных затратах труда, средств, материалов и времени при принятых условиях изготовления, эксплуатации и ремонта промышленного робота. Конструкция, достаточно технологичная в единичном производстве, часто оказывается малотехнологичной в массовом производстве и совершенно нетехнологичной в автоматизированном производстве.
Кинематические пары классифицируют по числу связей (ограничений), налагаемых парой на относительное движение звеньев (классификация И. И. Артоболевского) на кинематические пары пятого, четвертого, третьего, второго и первого классов (рис. 2.4).
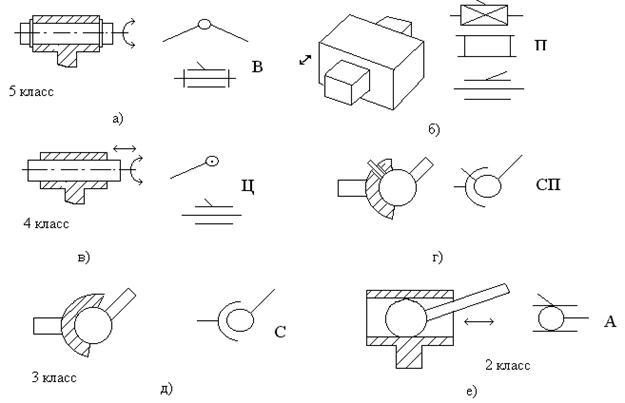
Рис. 2.4. Примеры кинематических пар.
По характеру соприкосновения звеньев кинематические пары делят на низшие, если элементы звеньев соприкасаются только по поверхности, и высшие, если элементы звеньев соприкасаются только по линиям или в точках. При этом линейный или точечный контакт понимается как первоначальный при соприкосновении звеньев без усилия, а под нагрузкой звенья, образующие высшую пару, будут соприкасаться по некоторой фактической поверхности, называемой пятном контакта.
Преимущество низших кинематических пар по сравнению с высшими - возможность передачи больших сил, поскольку контактная поверхность соприкасающихся звеньев низшей пары может быть весьма значительна. Применение высших пар позволяет уменьшить трение (пример - шарикоподшипник) и получать нужные, самые разнообразные законы движения выходного звена путем придания определенной формы звеньям, образующих высшую пару.
Кинематические пары во многом определяют работоспособность и надежность исполнительного устройства промышленного робота, поскольку через них передаются усилия от одного звена к другому; в кинематических парах, вследствие относительного движения, возникает трение, элементы пары находятся в напряженном состоянии и в процессе изнашивания.
Конструкция сложных кинематических пар наряду с повышением жесткости и точности должна обеспечивать непринужденную сборку узлов и позволять исполнительному механизму сохранять заданное число степеней подвижности при возможных деформациях стойки, валов, осей и других деталей под действием внешних нагрузок.
В исполнительных механизмах промышленных роботов используют кинематические пары только 5, 4 и 3 классов, но в основном кинематические пары 5- го класса.
Пары 4 и 3 классов эквивалентно заменяют комбинацией двух или трех пар 5-го класса (рис. 2.5.), т.е. кинематическим соединением – кинематической цепью, конструктивно заменяющей в исполнительном механизме кинематическую пару.
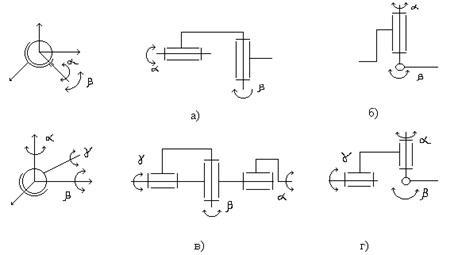
Рис. 2.5. Варианты замены кинематических пар высшего класса низшими.
Звено, принимаемое за неподвижное, называется основанием (стойкой). Звено, которому сообщается движение, преобразуемое исполнительным механизмом в требуемые движения упругих звеньев, называется входным. Звено, совершающее движение, для выполнения которого предназначен исполнительный механизм, называется выходным (конечным, последним).
Максимальное число входных звеньев равно числу степеней подвижности исполнительного механизма.
Звенья манипулятора соединяются друг с другом с помощью кинематических пар пятого порядка (по классификации теории механизмов и машин), вращательных и поступательных. Каждое звено имеет свое наименование. Так, с неподвижным основанием связана колонна, с колонной связана каретка, с кареткой – рука, с рукой – кисть, с кистью – захват (рис.2.6).
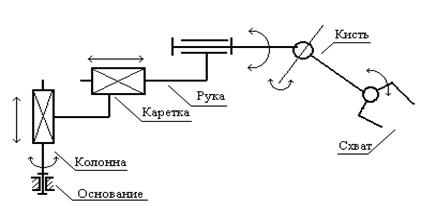
Рис. 2.6. Кинематика манипулятора промышленного робота.
Эти звенья образуют друг с другом кинематические пары 5-го класса, имеющие по одной степени подвижности. Каждая кинематическая пара получает движение от управляемого привода.
Система звеньев, связанных между собой кинематическими парами называется кинематической цепью. В зависимости от вида движения звеньев кинематические цепи подразделяют на плоские (рис 2.7. а, в) - звенья движутся в одной или нескольких параллельных плоскостях, и пространственные (рис. 2.6, б, г) - звенья движутся в пространстве.
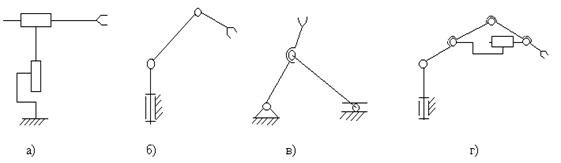
Рис. 2.7. Примеры кинематических цепей.
Кинематические цепи могут быть замкнутыми (рис.2.6,в) и незамкнутыми (рис. 2.6, а, б, г). Кинематические цепи исполнительных механизмов ПР являются в основном незамкнутыми. Существуют незамкнутые кинематические цепи с местными замкнутыми контурами (рис. 2.6, г).
Исполнительный механизм промышленного робота в процессе функционирования может иметь различную структуру. Во время движения в пространстве его можно рассматривать как незамкнутую кинематическую цепь. При выполнении технологической операции на движение исполнительного механизма накладываются дополнительные связи и он превращается в замкнутый механизм.
Для полного осуществления пространственного движения необходимо иметь в манипуляторе шесть степеней подвижности, из них три нужны для приведения конца манипулятора в требуемую точку пространства (переносные движения), еще три – для получения необходимой угловой ориентации захватного устройства (ориентирующие степени подвижности).
Под степенями подвижности манипулятора (степенями свободы) понимают обобщенные координаты, определяющие в пространстве положения его звеньев. Число степеней подвижности манипулятора n определяется по формуле

где к – число подвижных звеньев; Рi – число кинематических пар i-го класса.
Например, в рассматриваемом случае манипулятор, изображенный на рис. 4.8. содержит 5 подвижных звеньев (исключая неподвижное основание и внутреннее подвижное звено в захвате), образующих 5 кинематических пар 5-го класса. Поэтому
n = 6*5 – 5*5 = 5.
Различают следующие степеней подвижности: координатные (глобальные) - обеспечивающие выведение манипулятора в зону манипулирования; переносные (рабочие) - определяющие выведение захвата в заданные места рабочей зоны; ориентирующие (локальные) – обеспечивающие требуемые ориентации захвата в заданном месте рабочей зоны.
Если рабочая зона является объемной, то манипулятор должен иметь не менее трех переносных степеней подвижности. В случае плоской зоны манипулирования достаточно иметь лишь две переносные степени свободы. Увеличение числа степеней подвижности усложняет манипулятор, но одновременно увеличивает его маневренность, т.е. способность обходить препятствия в рабочей зоне.
Компоновка манипулятора зависит от выбранной системы координат его функционирования. С этой точки зрения различают манипуляторы, работающие в декартовой, цилиндрической, сферической и ангулярной (угловой) системах координат. Конструкция ПР зависит и от количества рук манипуляционной системы, управляемой одним и тем же устройством управления, а также от типа устройств передвижения.
Объектом манипулирования называют тело, перемещаемое в пространстве манипулятором. К объектам манипулирования относят заготовки, детали, вспомогательный, мерительный или обрабатывающий инструмент, технологическую оснастку и т.п.
Рабочий орган – составная часть исполнительного устройства промышленного робота для непосредственного выполнения технологических операций и/или вспомогательных переходов.
Основная особенность ПР заключается в том, что он предназначен для работы с другим технологическим оборудованием (ТО) и, по существу, представляет собой элемент этого оборудования, позволяющий создавать роботизированные технологические комплексы. Поэтому структуру ПР, работающего совместно с некоторым технологическим оборудованием можно представить так, как это показано на рис. 2.8.
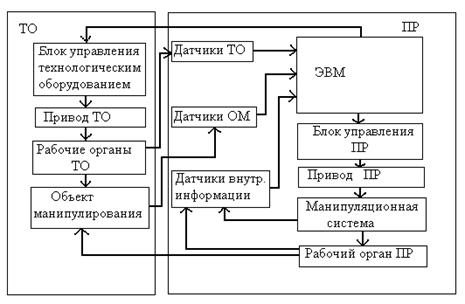
Рис. 2.8. Структура промышленного робота.
В общем случае технологическое оборудование состоит из тех же блоков и устройств, что и ПР. Как и ПР оно включает в себя блок управления, привод, рабочие органы, которые подобно рабочему органу ПР взаимодействуют с объектом манипулирования. ТО имеет также свои датчики, определяющие положение его рабочих органов, т.е. датчики внутренней информации. Исполнительные элементы как ТО, так и ПР управляются от ЭВМ. Единственное отличие ПР от ТО заключается лишь в том, что он дополнительно содержит антропоморфную исполнительную систему – манипулятор.
Очевидно, что характер обслуживаемого ТО существенно влияет на конструкцию и технические характеристики ПР. По этой причине говорят не о ПО вообще, а роботах-сборщиках, роботах прессового производства, роботах сварщиках и т.п. Универсальность ПР, как перепрограммируемой манипуляционной системы, носит не абсолютный, а относительный характер, поскольку имеет смысл лишь в рамках того оборудования, для обслуживания которого проектируется робот.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 5032; Нарушение авторских прав?; Мы поможем в написании вашей работы!