КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Порівняльні характеристики виконання функцій людиною і машиною
|
|
|
|
| Функції | Характеристики людини | Характеристики машини |
| Виявлення сигналу | Шкала подразників обмежена можливостями органів відчуття. Відчуває подразники незначної інтенсивності. Чутливість доволі висока Легко виконує фільтрацію при змінах програми | Доволі широка шкала подразників. Не виявляє сигнали незначної інтенсивності. Чутливість дуже висока. Важко здійснює фільтрацію при змінах програми |
| Розрізнення сигналу | Може охопити значну кількість фізичних вимірів. Розрізняє доволі слабкі сигнали на фоні «шумів». Обсяг каналу незначний. Запам'ятовує моделі доволі високої складності. Константність сприйняття форми, глибини і рельєфу висока | Може охопити незначну кількість фізичних вимірів. Не розрізняє слабкі сигнали на фоні «шумів». Обсяг каналу дуже великий. складні моделі. Константність сприйняття дуже незначна |
| Інтерпретація | Дуже велика гнучкість програмування і перепрограмування дій. Можливе самоінструктування на підставі досвіду і модифікація кодів за рахунок винахідливості. Може працювати у не передбачуваних ситуаціях. Організовує фрагменти інформації, створюючи взаємопов'язані семантичні одиниці. Узагальнює інформацію на базі індуктивного мислення. Використовує «згорнуті» форми мислення | Гнучкість перепрограмування дуже мала, жорстке кодування дій. Можливість самонавчання і винахідливості незначна. Дуже погано працює в не передбачуваних ситуаціях. Розпізнавання ситуації за окремими характеристиками неможливе. Узагальнення різних фактів незначне. Прийняття рішення на базі неповної інформації практично неможливе |
| Розрахунки | Повільні і неточні | Дуже швидкі і дуже точні |
| Зв'язок «стимул— реакція» | На той самий стимул може реагувати по-різному. Реакція порівняно повільна і нестабільна | На той самий стимул реагує відповідним чином. Реакція швидка і стабільна |
| Автономність | Значна незалежність у діях, здатність до саморегулювання | Усі дії передбачені програмою роботи або конструкцією машини |
| Надійність | Доволі незначна і підвладна змінам у часі | Може бути дуже значною і стабільною |
| Тривалість роботи | Незначна, за рахунок фізичного і психічного навантаження, але зберігається властивість до перевантаження за рахунок саморегуляції | Необмежена і безперервна, але перевищення заданого навантаження неможливе |
Принцип максималізації показників СЛМ передбачає максималізацію всіх тактико-технічних даних (ТТД) системи. Але виникають питання: як оцінити систему за єдиним комплексним показником, котрий із цих показників основний? Д. Мейстер і Дж. Рабідо вважають, що головним у реалізації цього принципу є знаходження компромісного рішення, тобто досягнення необхідних тактико-технічних даних системи з мінімальними витратами коштів і часу.
Принцип оптимізації інформаційного обміну. Згідно з цим принципом здійснюється оптимізація загального інформаційного потоку в системі з урахуванням психологічних і психофізіологічних можливостей людини, рівня невизначеності окремих задач, технічних можливостей машини.
Принцип взаємного резервування. Дотримання цього принципу передбачає можливість перерозподілу функцій у системі між людиною та машиною у процесі управління. Цей принцип може бути використаний як компенсаторний засіб щодо ліквідації недоліків інших принципів.
Принцип відповідності враховує гнучкість оперативного мислення оператора в процесі прийняття рішень і виконання окремих дій, яка забезпечує необхідну надійність у його роботі та функціонуванні системи в цілому. Тому найвідповідальніші завдання має вирішувати людина.
Принцип активності оператора. Відповідно до цього принципу людина-оператор повинна вирішувати завдання, в котрих могла б проявити свій творчий потенціал, самореалізуватися та самоствердитися.
Принцип легкості навчання враховує фактори часу та коштів, необхідних для відбору, підготовки і тренувань оператора, формування індивідуального стилю його діяльності.
Слід зауважити, що нині проблема розподілу функцій між людиною і машиною виявляється як проблема розподілу функцій між людиною і електронно-обчислювальною технікою, яка дуже швидко розвивається. Крім цього, потрібно диференціювати проблеми, що вирішуються у реальних масштабах часу, і проблеми, при вирішенні яких ЕОМ використовують для наукових розрахунків і цілей управління. В останньому випадку розподіл функцій між людиною і машиною дуже простий, тому що машини використовуються в тих випадках, коли треба виконати роботу швидше, надійніше і ефективніше, ніж це вдається людині. Використання ж машин у реальному часі управління потребує розподілу функцій між складовими діючих СЛМ. Цей розподіл був різним упродовж історичного розвитку трудових процесів. Спочатку від людини до машини переходили певні рухові функції, потім функції передавання інформації, а зараз і її приймання, переробки та прийняття рішень. Але це вже проблема «штучного інтелекту», яка пов'язана з наближенням машинних засобів вирішення завдань до людських.
3. Показники якості функціонування системи «людина — машина»
Будь-яка СЛМ покликана задовольняти певні потреби людини або суспільства. Для цього вона повинна мати низку властивостей, які закладаються під час її проектування і реалізуються в процесі її експлуатації. Згідно з державним стандартом ДЕСТ 2.116-71, властивості СЛМ – це об’єктивна особливість, яка виявляється в процесі експлуатації. Кількісна характеристика певної властивості системи має назву показника якості СЛМ, тобто кожна СЛМ має нескінчену множину властивостей, що визначають її якість. Під якістю розуміють сукупність властивостей, які характеризують ступінь придатності системи для використання її за призначенням, тобто її ефективність.
Нині поряд з основними показниками розробки та експлуатації технічних систем (продуктивність, надійність, економічність) різко зросло значення таких показників, як ергономічність, екологічність, естетичність, котрі забезпечують досягнення соціальної ефективності нової техніки. Використання досягнень інженерної психології при проектуванні техніки й умов її функціонування сприяє підвищенню ефективності і якості праці, зручності експлуатації та обслуговування техніки, скороченню термінів її освоєння, поліпшенню умов праці, економії витрат фізичної і нервово-психічної енергії працюючої людини, підтриманню її високої працездатності.
Участь людини-оператора у функціонуванні СТЛС зумовлює наявність специфічних властивостей, які визначають інтегральні характеристики зв'язку людини і машини в конкретних умовах зовнішнього середовища. Сукупність цих специфічних властивостей, котрі забезпечують можливість динамічної взаємодії людини з технічними засобами з метою виконання системою поставлених завдань у заданих умовах експлуатації, можна назвати ергономічністю системи. Ця інтегральна характеристика забезпечується певними інженерно-психологічними властивостями системи, зокрема швидкодією, точністю, надійністю і напруженістю діяльності оператора.
Швидкодіяхарактеризується часом проходження інформації по замкненому колу «людина — машина», а точніше, часом функціонування СЛМ до досягнення певної мети, тобто тривалістю циклу регулювання:
Де ti ~ час обробки інформації в i-й ланці СЛМ; k — кількість ланок СЛМ, в ролі яких виступають і технічні системи, і оператори.
Цикл регулювання — це проміжок часу, за який виникає відхилення у системі і відбувається його ліквідування, тобто система стає такою, як задано програмою. Розглянемо цю характеристику на прикладі простої одноконтурної схеми регулювання.
Припустимо, що оператор повинен витримувати технічні параметри системи в заданих межах. Один із цих технічних параметрів, незалежно від дій оператора, почав відхилятися від заданого значення no до значення n1 котре розглядається як порушення в роботі системи. Інформація про це порушення з'явиться на приладах за час t1 який зумовлений інерційністю системи вимірювання. Для її знаходження, сприйняття, обробки і прийняття рішення операторові необхідний певний час t2. Крім цього, для виконання певних керуючих дій теж потрібен певний час — t3 а для їхнього тривання в системі, з метою приведення цього параметра в норму, також необхідний певний час — t 4. Таким чином, проходження інформації по контуру управління визначається сумарним часом затримки інформації в окремих складових системи «людина — машина». Час проходження інформації в технічних частинах СЛМ (t1 і t4 ) зумовлений технічними характеристиками системи. Час, необхідний на сприйняття інформації, прийняття рішень і виконання керуючих дій (t2 і t3 ), залежить від самого оператора, цілей та умов його діяльності:

Таким чином, оператор керує системою і регулює її роботу відповідно до певної програми, яка має часові характеристики. Виконання цієї програми залежить від технічних характеристик системи, які зумовлюють зовнішні, технічні, часові обмеження. Крім цього, людині-оператору притаманні свої, внутрішні, психофізіологічні властивості, які теж зумовлюють певні часові обмеження. При цьому ці внутрішні обмеження можуть змінюватися залежно від функціонального стану оператора. Ось чому досягнення однієї і тієї ж мети відбувається по-різному не тільки у різних операторів, але і в одного й того ж.
Та в конкретних умовах діяльності певний оператор може, не відчуваючи напруження, витратити мінімальний час на знаходження, сприйняття, переробку інформації і прийняття рішень (t2,), а також на введення цього рішення у систему через керуючі дії (t3). За таких умов час циклу регулювання буде мінімальним:
Ця характеристика є показником внутрішніх обмежень оператора, його швидкісних можливостей, які залежать від швидкості перебігу нервових процесів.
Тепер звернемо увагу на зовнішні обмеження, які необхідно враховувати в діяльності оператора. Розглянемо той самий приклад, але припустимо, що оператор, сприйнявши відхилення параметра п за час t 2тт, не реагував на нього, і воно (відхилення параметра п) наростало й надалі. Характер відхилення параметра п наведений на рис. 2.
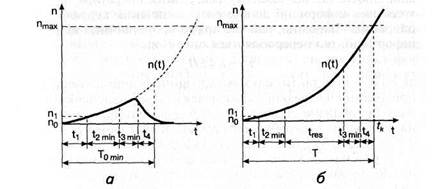
Рис. 2 Характер залежності циклу регулювання (Г) від параметра п
Гранично допустиме відхилення даного параметра в системі — nmax, збільшення якого призводить до відмови системи, як бачимо з рис. 2. Останній момент, коли ще оператор може втрутитися у функціонування системи, є час tк, за умови, що командні дії оператор введе за час tk, і вони пройдуть у системі за час t 4. Виходячи з цього, оператор у наведеному прикладі має певний вільний час понад мінімальний, який був названий резервним:

Слід зауважити, що поняття резервного часу введене умовно, оскільки в реальній діяльності виникають додаткові затримки інформації, які збільшують час її обробки і реагування на неї. До того ж резервний час, так би мовити, вмі щує або враховує індивідуальні психофізіологічні розбіжності між операторами. Для оцінки рівня технічних обмежень у часі використовують поняття ліміту і дефіциту часу. Говорячи про «ліміт», мають на увазі певні зовнішні обмеження у часі. Термін «дефіцит» уживається тоді, коли відведений оператору час менший за мінімально необхідний для вирішення задачі. Але за рахунок саморегуляції деякі оператори можуть підвищити свої швидкісні можливості і укластися у відведений час. Правда, тут постає питання: якою «ціною» це їм вдається?
щує або враховує індивідуальні психофізіологічні розбіжності між операторами. Для оцінки рівня технічних обмежень у часі використовують поняття ліміту і дефіциту часу. Говорячи про «ліміт», мають на увазі певні зовнішні обмеження у часі. Термін «дефіцит» уживається тоді, коли відведений оператору час менший за мінімально необхідний для вирішення задачі. Але за рахунок саморегуляції деякі оператори можуть підвищити свої швидкісні можливості і укластися у відведений час. Правда, тут постає питання: якою «ціною» це їм вдається?
З іншого боку, критерієм швидкодії є час вирішення задачі, тобто час від моменту реагування оператора на надходження інформації до моменту закінчення керуючих дій оператора. Звичайно, цей час прямо пропорційний кількості інформації, що переробляється оператором:

де а і Ь — константи, що мають певний фізичний зміст: а — прихований час реакції, який залежить від модальності сигналу і приблизно дорівнює 0,2с; Ь — величина, яка зворотна швидкості переробки інформації оператором і дорівнює 0,15: 0,35 с/біт; Н — кількість інформації в бітах.
У разі надходження декількох сигналів оператор приступає до обробки певного сигналу через деякий час, тобто сигнал чекає своєї обробки, на що витрачається певний час — tчек У цьому випадку швидкодія переробки інформації оператором характеризується двома складовими:

а тривалість циклу регулювання становить

де ti — час затримки інформації у і-й ланці машини, а п — кількість ланок машини.
При заданому Тп і відомих л (паспортні дані технічних пристроїв) від оператора вимагається така швидкодія:
З іншого боку, tц можна визначити як суму часу кожного з етапів переробки інформації, прийняття рішень і здійснення керуючих дій — t2 і t3
Таким чином, часові характеристики діяльності оператора в інженерній психології можуть застосовуватись як:
- показник часових обмежень;
- показник швидкості перебігу нервових процесів;
- характеристика процесу навчання;
- характеристика узгодженості складових СЛМ.
Точністьроботи оператора — це відповідність його дій заданій програмі. Програма роботи може задаватися у вигляді послідовності дій і у вигляді результату, якого потрібно досягти. Але в процесі діяльності операторові доводиться враховувати численні зміни, які доповнюють і уточнюють програму, потребують нових критеріїв оцінок. Завдяки цьому в оператора складається досить конкретна система уявлень про показники діяльності системи, яка формує певний образ-еталон, згідно з яким він організовує свою діяльність і підтримує необхідну точність у процесі реалізації програми.
У реальному процесі управління, хоч би як ідеально він був організований, результати дій оператора, а також показники роботи техніки неодмінно мають деякі відхилення від заданих програмних значень, які називають похибками. Поки похибка перебуває в допустимих межах, визначених правилами, інструкціями, програмами тощо, це нормальне явище, і воно принципово не впливає на функціонування системи в цілому. Коли ж похибка перевищує встановлені значення, то це вже порушує нормальну роботу системи, і її кваліфікують як помилку.
У випадках, коли похибка в роботі оператора досягає значення, за якого неможлива подальша робота оператора або показники його діяльності не можуть забезпечити досягнення поставленої мети, її кваліфікують як відмову людини-оператора. Точність системи прийнято характеризувати величиною, зворотною до її найбільш допустимої похибки.
Коли мова йде про систему «людина — машина», то окрема оцінка точності оператора і техніки без урахування їхнього взаємозв'язку буде неповною. Оператор під час керування системою впливає на весь комплекс її параметрів, які, своєю чергою, теж пов'язані між собою, і тому вплив на один із параметрів системи може відобразитися на точності регулювання інших. До того ж похибка в регулюванні різних систем вимірюється різними одиницями. Ось чому загальна похибка системи має враховувати питому вагу кожної з її складових. Такий підхід дає змогу оцінювати вплив окремих систем на загальну точність її регулювання, прогнозувати процес накопичення в окремих складових системи, що сприяє розробці цілеспрямованих заходів з підвищення точності функціонування СЛМ.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 519; Нарушение авторских прав?; Мы поможем в написании вашей работы!