КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Качение одиночного колеса с эластичной шиной по деформируемому грунту
|
|
|
|
Полемика реализма и номинализма
Схоластика
Главным направлением в развитии средневековой философии феодального общества была схоластика.
1) Центральным вопросом, которым занимались схоластики, был вопрос об отношении знания к вере.
Схоластики исходили из тезиса о первенстве и главенстве веры над разумом (Ф.Аквинский).
2) Другой (философский) вопрос – отношение общего к единичному (реализм и номинализм).
Реализм ( Ф.Аквинский) - учение, согласно которому подлинной реальностью обладают только общие понятия (универсалии), а не единичные предметы, существующие в эмпирическом мире.
Универсалии существуют до вещей! (Платон)
П ротивоположное реализму направление носило название номинализма.
Номинализм (И.Росцеллин, Д.Скотт, В.Оккам) – философское учение, отрицающее онтологическое значение общих понятий и утверждающее, что они существуют не в действительности, а только в мышлении. По утверждению номиналистов, общие понятия – это только имена, они не обладают никаким самостоятельным существованием вне и помимо единичным вещей.
Универсалии существуют после вещей! (материализм)
3.1. Основные предпосылки, принимаемые при рассмотрении качения колеса по деформируемому грунту
При движении по грунту параметры качения колеса существенно зависят от характеристик грунтовой поверхности. Большинство предлагаемых исследователями зависимостей по их определению имеют сложную структуру, поскольку авторы стремятся как можно точнее учесть все характеристики грунта. К таким характеристикам относятся, например, угол внутреннего трения грунта, коэффициент молекулярных и капиллярных сил сцепления, коэффициент трения, модуль среза, коэффициент постели, а также большое количество эмпирических коэффициентов, учитывающих различное состояние грунта.
Для определения этих характеристик требуется проведение достаточно трудоемких экспериментов. Практическая ценность уравнений, в которые входит большое число таких эмпирических показателей и характеристик, в существенной мере снижается, а достоверность получаемых результатов вызывает определенное сомнение вследствие неизбежности принятия при выводе зависимостей определенных допущений.
По нашему мнению, такой путь анализа процесса качения колеса по грунту малопригоден для изучения распределения потока мощности по отдельным составляющим, потому что многообразие грунтов (вернее, их характеристик) и их зависимость от погодных условий и даже от времени суток обусловливают практическую невозможность учета конкретных текущих характеристик различных грунтов.
При рассмотрении процесса качения колеса по грунту воспользуемся ранее принятым в механике грунтов выражением для определения зависимости удельного давления q сопротивления вдавливанию в грунт штампа от глубины его погружения h:
q = ch , (3.1)
, (3.1)
где: с - параметр, характеризующий начальное сопротивление грунта вдавливанию штампа;
 - показатель степени, характеризующий закон изменения сопротивления грунта вдавливанию.
- показатель степени, характеризующий закон изменения сопротивления грунта вдавливанию.
Эту формулу широко используют для построения зависимостей, характеризующих процесс качения колеса по грунту. Преимущество уравнения (1) заключается, прежде всего, в его относительной простоте и наличии экспериментальных данных для определения величин с и. Основным его недостатком является обнаруженная рядом исследователей зависимость величин с и от формы и размеров штампа, что снижает точность расчетов, проведенных на основе использования табличных значений с и. Однако достоверность расчетов можно в значительной степени повысить, если экспериментально определять эти величины путем прокатывания по грунту колеса соответствующих габаритных размеров.
Табличные значения с и , приведенные в многочисленных работах, с успехом используются для решения ряда практических задач. В частности, сравнительные расчетные исследования колес с приблизительно равными геометрическими размерами дают вполне удовлетворительное совпадение результатов расчетов с результатами экспериментов.
Степенная зависимость вполне применима при проведении исследований полноприводных автомобилей народнохозяйственного назначения, движение которых, в основном, осуществляется по грунтовым дорогам и сельскохозяйственным грунтовым фонам.
При исследованиях колесной техники, имеющей специальное назначение и используемой часто в специфических условиях движения, более достоверны зависимости для оценки деформации грунта, учитывающие его неоднородность и различные комбинации прочности слоев грунта [1]. Эти зависимости более сложные, требуют большего количества характеристик грунта, но более точно отражают физические процессы при движении колесных машин.
Степенная зависимость и зависимости, в основе которых лежат такие параметры, как модуль деформации грунта Е и несущая способность грунта РS, связываются аналитическими выражениями, позволяющими осуществить переход от формулы (3.1) к выражениям для Е и РS в формулах Я.С. Агейкина.
3.2. Уравнения силового равновесия колеса при его качении по грунту
Рассмотрим прямолинейное качение одиночного эластичного колеса по деформируемому грунту, приняв при этом некоторые допущения:
- рассматривается прямолинейное движение с установившейся небольшой
скоростью;
- грунт однороден, имеет одинаковые физико-механические свойства;
- поверхность грунтового основания горизонтальная и ровная;
- упругость грунта мала, и ею можно пренебречь.
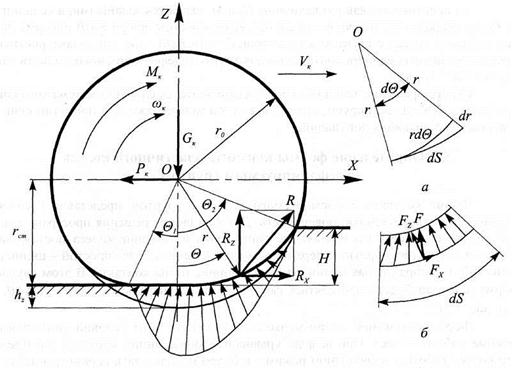
Введем полярную систему координат, совместив центр координат (точка О) с осью колеса. Расчетная схема приведена на рис. 3.1.
Задача рассматривается как двумерная. Двухмерность задачи понимается в том смысле, что все существенные силы взаимодействия колеса с грунтом лежат в плоскости вращения колеса.
В общем случае качения эластичного колеса по деформируемому грунту форма поверхности колеса в контакте с грунтом задается уравнением:
r = f( ), (3.2)
), (3.2)
где: - полярный угол, отсчитываемый от вертикальной оси Z;
r - величина радиус-вектора, проведенного из точки О к данной точке поверхности колеса.
Обозначим погонную нагрузку, действующую на элементарный участок длины дуги колеса dS, через F [Н/м], которую можно разложить по осям X и Z на компоненты (Fx и Fz).
Элементарный участок длины дуги колеса dS выразим через угол и радиус-вектор r. Из схемы деформации элемента колеса (рис. 3.1, а) имеем:
|
Рис. 3.1. Расчетная схема качения эластичного колеса по деформируемому грунту: а -деформация элемента колеса; б - нагрузка на элементарный участок дуги колеса
Элементарную силу, действующую на дугу колеса длиной dS можно представить в виде FdS [Н] (рис. 3.1, б). Она возникает как равнодействующая элементарных сил смятия грунта, сил трения и сил, возникающих при деформации колеса. Далее, разлагая элементарную силу по осям X и Z на компоненты и интегрируя по дуге контакта X и Z



на компоненты и интегрируя по дуге контакта поверхности колеса с грунтом, запишем уравнения равновесия колеса в виде:
Поскольку из уравнений силового равновесия колеса вытекает:
Rx = Pk (3.7)
Rz = Gk (3.8)
то, зная зависимости F () и r (), по соотношениям (3.4)-(3.6) можно определить величины Рк; GK и Мк.
На практике же, как раз величины Gk и Мк являются заданными, а величину Рк можно определить только в том случае, если известны эпюра F () и форма линии контакта колеса с грунтом в виде зависимости r (), Обе эти характеристики зависят от сцепных свойств контакта «шина-грунт» и деформационных свойств как грунта, так и шины.
Строгое решение такой обратной задачи является сложной математической проблемой. Проиллюстрируем, сколь сложна эта задача даже при принятии существенных упрощающих допущений.
3.3. Определение формы контакта эластичного колеса с деформируемым грунтом
Форма контакта деформируемого колеса с грунтом представляет собой сложную пространственную поверхность. Для упрощения решения пространственной задачи полагаем, что контактные напряжения по ширине колеса постоянны. Тогда сложную трехмерную поверхность можно заменить более простой - цилиндрической, где образующая цилиндра равна ширине пятна контакта. В этом случае форма контакта будет определяться формой дуги с центральным углом (1 + 2) (см. рис. 3.1).
Форма контактной линии меняется в зависимости от условий движения и режима работы колеса. При выводе уравнения формы линии контакта полагаем, что колесо работает в свободном режиме, и будем использовать параметры деформационных характеристик шины и грунта.
Для твердой опорной поверхности зависимость прогиба шины hz от нормальной нагрузки G,- близка к линейной:
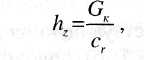
где сг - радиальная жесткость шины (Н/мм).
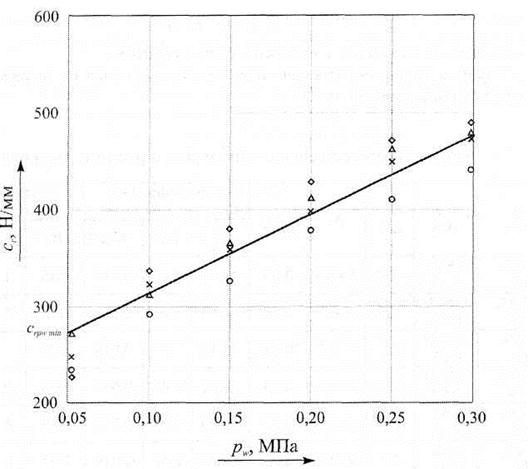
Экспериментально установлено, что основным фактором, оказывающим влияние на изменение радиальной жесткости шины, является внутреннее давление воздуха в шине, и эта зависимость с достаточной для практических целей точностью может быть аппроксимирована линейной функцией:

(3.10)
где: Kpw - эмпирический коэффициент;
pw - внутреннее давление воздуха в шине;
cw - значение радиальной жесткости шины при минимальном внутреннем давлении воздуха.
В качестве примера на рис. 3.2 представлена экспериментальная зависимость cr=f(p w) для шины 16.00-20 модели И-159.
Для более точных расчетов зависимость (3.10) аппроксимируется уравнением регрессии:
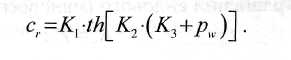
(3.11)
Коэффициенты уравнения регрессии К1, К2 и К3 по отечественным шинам регулируемого давления представлены в табл. 3.1. Приведенные значения этих коэффициентов соответствуют номинальному внутреннему давлению воздуха в шине.
|
Рис. 3.2. Экспериментальная зависимость с. =f{pw) для шины 16.00-20 модели И-159. Вертикальная нагрузка на колесе:

В табл. 3.1 В - ширина шины; r0 - радиус шины при номинальном давлении; V г - габаритный объем шины, Кн - коэффициент насыщенности рисунка протектора, pw min - минимально допустимое внутреннее давление воздуха в шине, f 0шн - коэффициент сопротивления качению прогретых шин при скорости 10 км/ч.
Из уравнений (3.9) и (3.10) получим:
Прогиб шины hz гр при качении колеса по деформируемому грунту можно определить, исходя из схемы контакта колеса (см. рис. 3.1), полагая, что линия кс такта колеса с грунтом имеет плоскую и криволинейные зоны.
Часть вертикальной нагрузки, воспринимаемой плоской зоной контакта, (определится, как:
 (3.13)
(3.13)
Связь между деформационными характеристиками колеса и грунта в плоской зоне контакта определится из соотношения:
cr hz гр =c Fш H (3.14)
(3.14)
где: Fш - площадь плоской зоны контакта шины с грунтом;
Н - глубина колеи, образуемая колесом, определяемая по выражению (3.71), вывод которого представлен ниже.
Таблица 3.1
Данные по отечественным шинам регулируемого давления
| Шины | r0 /B | Vr, | Kн | Pw min, МПа | Номинальные значения | Коэффициенты регрессии | ||||
| модель | м/м | дм3 | G k кН | pwн min | f0 шн | K1 | к2 | Кз | ||
| 12.00-18, К-70-1 | 0,542/ 0,26 | 0,449 | 0,05 | 18,13 | 0,30 | 0,015 | 1,8 | 0,105 | ||
| 12.00R-18, КИ-115 | 0,542/ 0,26 | 0,427 | 0,08 | 18,13 | 0,45 | 0,012 | 2,4 | 0,070 | ||
| 12.00-20, М-93 | 0,571/ 0,27 | 0,367 | 0,05 | 18,13 | 0,30 | 0,015 | 2,9 | 0,040 | ||
| 12.00R-20, КИ-113 | 0,571/ 0,27 | 0,367 | 0,08 | 19,60 | 0,45 | 0,013 | 2,4 | 0,070 | ||
| 14.00-20, ОИ-25 | 0,63/ 0,32 | 0,358 | 0,05 | 24,50 | 0,32 | 0,017 | 4,9 | 0,030 | ||
| 14.00-20, ОИ-52 | 0,63/ 0,32 | 0,358 | 0,05 | 24,50 | 0,32 | 0,016 | 4,6 | 0,055 | ||
| 1220x400-533, ИП-184 | 0,60/ 0,34 | 0,348 | 0,05 | 25,58 | 0,32 | 0,016 | 3,7 | 0,070 | ||
| 425/85R21, Кама-1260 | 0,63/ 0,375 | 0,374 | 0,10 | 29,40 | 0,45 | 0,012 | 2,9 | 0,021 | ||
| 1200x500-508, ИД-П284 | 0,592/ 0,40 | 0,435 | 0,08 | 32,34 | 0,40 | 0,015 | 3,0 | 0,105 | ||
| 1300x530-533, ВИД-201 | 0,65/ 0,44 | 0,465 | 0,08 | 35,28 | 0,35 | 0,017 | 1,7 | 0,080 |
Введем допущения для рассматриваемой формы контакта деформируемого колеса с грунтом:
1) вне зоны контакта с опорной поверхностью колесо не испытывает деформации в радиальном направлении, поэтому в точке входа элемента колеса в контакт радиус колеса принимаем равным радиусу колеса в свободном состоянии го;
2) при выходе колеса из зоны контакта с опорной поверхностью оно не может мгновенно восстановить своей формы до состояния го, поэтому при в = 01 радиус-вектор колеса определяется зависимостью (3.2);
3) для упрощения вывода математического выражения линии контакта эластичного колеса с деформируемым грунтом примем, что вертикальная проекция центра колеса располагается в плоской зоне контакта. Тогда условный статический радиус колеса будет равняться:
rст = r0 - hz (3.15)
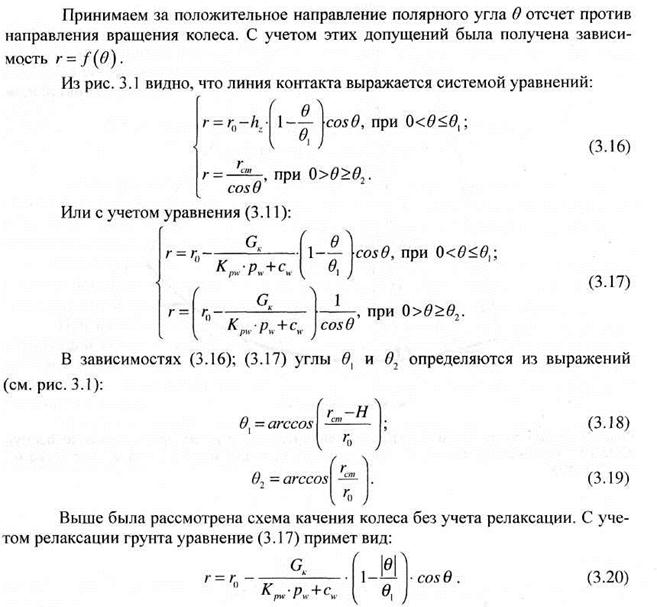
Уравнения (3.17) и (3.20) позволяют описать разные по форме контактные линии. Линия контакта деформируемого колеса с грунтом согласно исследованиям, приведенным в работе [1], в зависимости от сочетания нормальной нагрузки и давления воздуха в шине, может принимать форму, близкую к окружности, либо форму с плоской нижней частью.
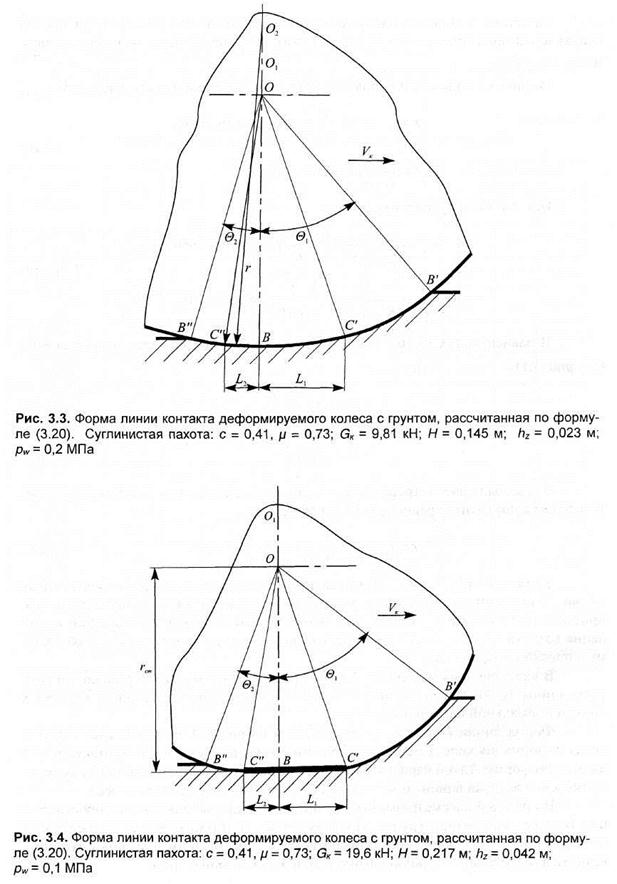
В качестве примера на рис. 3.3, 3.4 приведены расчетные формы линии контакта шины 16.00-20 при различных сочетаниях внутреннего давления воздуха в шине и нормальной нагрузки на колесо.
Форма линии контакта, представленная на рис. 3.3, соответствует случаю, когда деформация колеса меньше деформации грунта. Тогда линия контакта имеет выпуклую форму. Такой вариант формы контакта возможен при сочетании высокого давления воздуха в шине и небольших или средних нагрузках на колесо.
На рис. 3.4 рассматривается случай, когда деформация колеса сопоставима или больше деформации грунта. Поэтому линия контакта имеет в нижней части плоскую зону. Такая форма контакта соответствует небольшим значениям давления воздуха в шине и вертикальной нагрузке, близкой к номинальной.
|
Результаты расчетов хорошо соотносятся с формами линий контакта, приводимыми в работах других авторов, и с наблюдаемыми при экспериментах. Таким образом, уравнения (3.17) и (3.20) позволяют учесть влияние внутреннего давления воздуха в шине и нормальной нагрузки на колесо на форму контакта при его взаимодействии с грунтом.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1457; Нарушение авторских прав?; Мы поможем в написании вашей работы!