КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Состав САУ
|
|
|
|
Оперативный контроль и диагностирование состояния двигателя.
Контроль исправности элементов САУ.
В электронной части САУ двигателя автоматически контролируется исправность элементов САУ. При отказе элементов САУ информация о неисправностях выдается в систему контроля СУ самолета. Выполняется реконфигурация программ управления и структуры электронной части САУ для сохранения ее работоспособности.
САУ, интегрированная с системой контроля, выполняет дополнительно следующие функции:
¾ прием сигналов от датчиков и сигнализаторов двигателя и самолета, их фильтрацию, обработку и выдачу в бортовые системы индикации (КИСС), регистрации (МСРП) и другие системы самолета, преобразование аналоговых и дискретных параметров;
¾ допусковый контроль измеренных параметров;
¾ контроль параметра тяги двигателя на взлетном режиме;
¾ контроль работы механизации компрессора;
¾ контроль положения элементов реверсивного устройства на прямой и обратной тяге;
¾ расчет и хранение информации о наработке двигателя;
¾ контроль часового расхода и уровня масла при заправке;
¾ контроль времени запуска двигателя и выбега роторов КНД и КВД при останове;
¾ контроль систем отбора воздуха и системы охлаждения турбины;
¾ виброконтроль узлов двигателя;
¾ анализ тенденций изменения основных параметров двигателя на установившихся режимах.
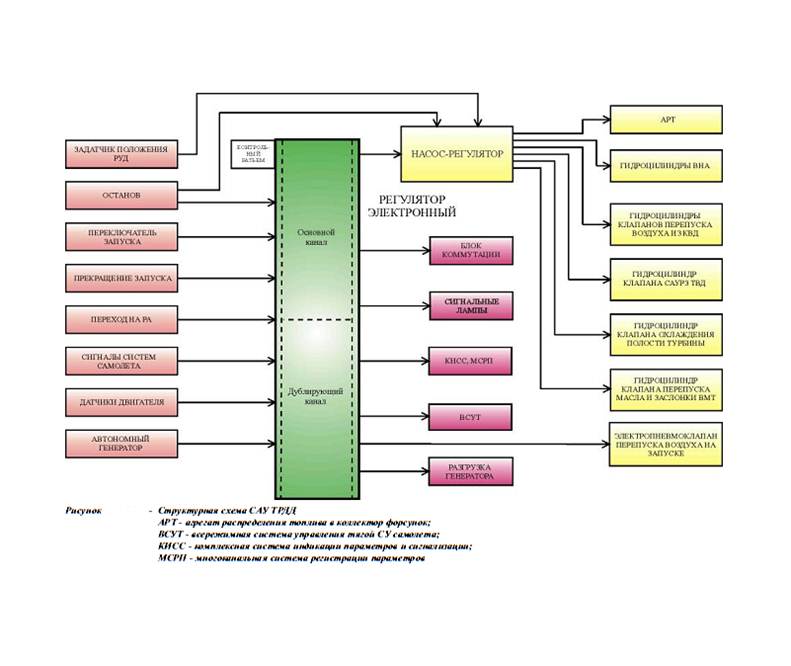
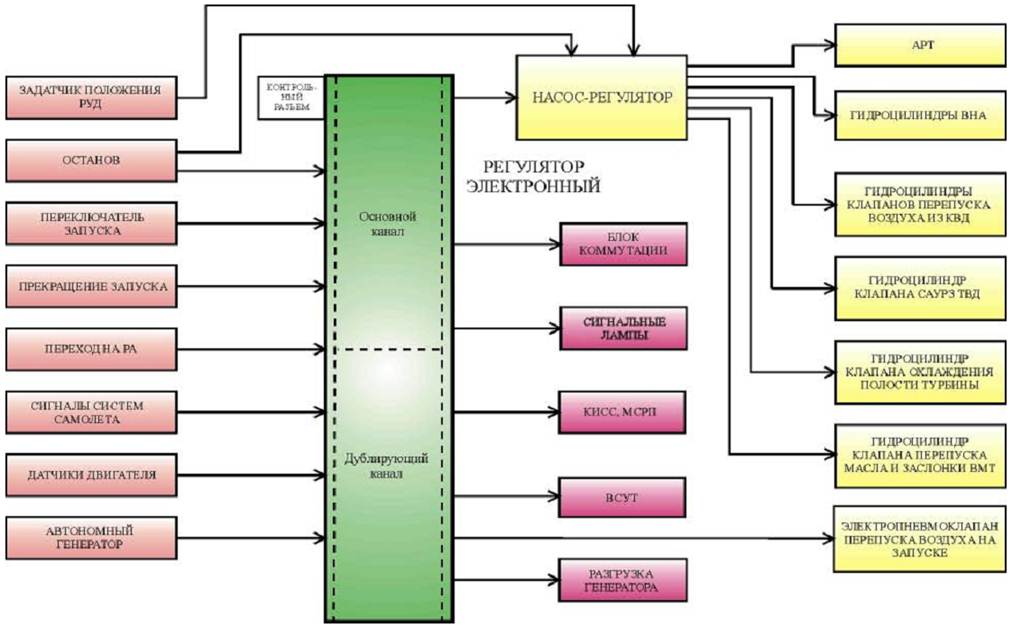
В состав САУ ТРДД входят следующие агрегаты и датчики:
¾ основной регулятор;
¾ датчики электронной части;
¾ блок коммутации;
¾ автономный генератор;
¾ резервный регулятор (если предусмотрено резервное управление отдельным регулятором);
¾ агрегат управления механизацией двигателя;
¾ агрегат защиты от достижения предельных параметров двигателя;
¾ датчики резервного регулятора;
¾ исполнительные механизмы.
Возможный вариант принципиальной схемы САУ ТРДД приведен на Рис. 2.(ПС-90)
Состав САУ определяется принятым конструктивным решением. К составу САУ традиционно относят и агрегаты топливной системы.
Основной регулятор
Электронный регулятор двигателя (РЭД) представляет собой специализированную электронную цифровую вычислительную машину, работающую в реальном масштабе времени. РЭД оснащен устройствами сопряжения с датчиками и исполнительными механизмами электронной системы управления и устройствами связи с двигательными и самолетными системами по мультиплексным каналам информационного обмена (МКИО), см. Рис. 12.1.1.2_3. РЭД предназначен для выполнения логических, управляющих и контролирующих программ, обеспечивающих управление двигателем на всех режимах его работы во всех условиях эксплуатации. Он интегрирован с бортовым управляющим комплексом, а также выдает информационные сигналы в многоканальную систему регистрации параметров (МСРП) и комплексную систему электронной индикации и сигнализации (КСЭИС).
Основной регулятор может быть гидро (пневмомеханическим устройством, если в рассматриваемом конкретном случае его применение более рационально, чем применение электронного регулятора.
Датчики электронной части.
Работу электронно-гидромеханической системы управления обеспечивают автономные датчики:
¾ частоты вращения ротора КВД
¾ частоты вращения ротора вентилятора
¾ температуры газа за турбиной;
¾ температуры газа за TНД на запуске;
¾ температуры РЛ первой ступени ТВД;
¾ температуры воздуха на входе в двигатель;
¾ полного давления воздуха на входе в двигатель;
¾ полного давления воздуха за КВД;
¾ углового положения лопаток ВНА;
¾ углового положения РУД;
¾ положения дозирующей иглы ДИ (в составе насоса-регулятора (НP));
¾ расхода топлива в КС (и, или ФК);
¾ наличия пламени в КС (и, или ФК);
¾ температуры топлива в топливной системе;
¾ температуры масла на выходе из опор роторов двигателя.
Возможна установка других датчиков в соответствии с принятыми программами управления.
Датчики имеют на выходе нормализованный электрический сигнал в аналоговом, частотном или кодовом виде. Сигнал подается во входной порт электронного преобразователя по электрическим или оптоволоконным линиям связи.
Блок коммутации.
Блок коммутации (БК) (см. Рис. 12.1.12._6) предназначен для усиления сигналов управления электроагрегатами пусковой системы и коммутации сильноточных цепей электроагрегатов по сигналам от РЭД, двигателя или из кабины самолета. БК обеспечивает также формирование команд на управление ручным запуском двигателя как на земле, так и в воздухе при отказе электронного регулятора. БК, как правило, установлен на двигателе.
Автономный генератор.
Электропитание САУ осуществляется от бортовых источников летательного аппарата. Для повышения надежности работы САУ дополнительно к бортовому электропитанию предусматривают автономный генератор (АГ) для резервного питания электронной части САУ АГ устанавливается на коробке приводов двигателя.
Резервный регулятор.
Резервный регулятор, как правило, гидромеханический или гидропневмомеханический. Он может быть объединен с качающим узлом, дозатором топлива, исполнительной частью электронной системы, агрегатом резервного управления механизацией двигателя. В этом случае агрегат называется «насос-регулятор». Насос-регулятор (HP) (см. Рис. 12.1.1.27) при работе системы управления на основной автоматике предназначен:
¾ для топливоподачи в КС;
¾ надсистемного ограничения частоты вращения ротора КВД и давления воздуха за КВД,
¾ подвода топлива высокого давления к гидроцилиндрам систем управления механизацией компрессора и отборами воздуха по сигналам, формируемым электронным регулятором.
В агрегат резервного регулятора входят преобразователи-усилители сигналов основного регулятора в гидравлические, пневматические сигналы управления, которые далее поступают к исполнительным механизмам. При работе на резервной автоматике HP управляет режимом, механизацией двигателя и обеспечивает переходные режимы без забросов и колебаний параметров двигателя. Управление, как правило, осуществляется по упрощенным программам с пониженной точностью из условия обеспечения тяги для безаварийного полета. HP устанавливается на коробке приводов двигателя.
Агрегат управления механизацией двигателя.
Агрегат управления механизацией двигателя, как правило, представляет собой гидромеханическое или гидропневмомеханическое устройство. Он может быть выполнен отдельным агрегатом или объединенным с агрегатом типа HP.
Агрегат управления механизацией управляет:
¾ направляющими аппаратами, в том числе ВНА;
¾ клапанами перепуска воздуха из подпорных ступеней, из компрессора, за компрессором;
¾ подачей воздуха на охлаждение корпусов компрессора и турбины, а также охлаждение лопаток турбины.
Агрегаты управляющей и исполнительной частей, датчики положения, датчики двигательных параметров и наружного воздуха, регулирующие органы объединяются в систему управления механизацией двигателя. Программы управления механизацией двигателя могут быть реализованы в основном электронном регуляторе. В этом случае при отказе основного регулятора агрегат управления механизацией двигателя может управлять ею по упрощенным программам. Может быть реализовано смешанное управление, например, управление ВНА по аналоговой программе осуществляет электронный регулятор, а управление другими элементами механизации - резервный агрегат управления механизацией двигателя.
В варианте управления основным электронным регулятором, агрегат управления механизацией двигателя содержит преобразователи сигналов от электронного регулятора в гидравлические (или пневматические) сигналы и гидравлические (или пневматические) усилители сигналов, направляемых в исполнительные механизмы системы управления механизацией двигателя.
Агрегат защиты от достижения предельных параметров двигателя.
Агрегат защиты двигателя от достижения предельных параметров, как правило, является над- системным ограничителем, т.е. защищает двигатель в случае неисправностей основного или резервного каналов управления, приводящих к забросам параметров двигателя. Агрегат защиты двигателя от предельных параметров вместе с датчиками и исполнительной частью объединяют в систему зашиты двигателя от достижения предельных параметров, например, система защиты турбины от раскрутки (СЗТР) или блок защиты двигателя от достижения предельных параметров.
Датчики резервного регулятора.
Датчики резервного регулятора, как правило, гидромеханические, пневмомеханические или механические аналоговые. Состав датчиков определяется выбранными программами управления резервного регулятора. В своем составе имеют преобразователь измеренной величины параметра в аналоговый гидравлический или пневматический сигнал.
Исполнительные механизмы.
Исполнительные механизмы предназначены для перемещения регулирующих органов в соответствии с полученным от основного или резервного регулятора сигналом управления. Исполнительные механизмы гидромеханические, пневмомеханические или электромеханические (гидропневмоцилиндры, гидропневмомоторы, электромоторы, сельсин- моторы и т.п.).
Состоит из электронной части (ЭЧ САУ) и взаимодействующих с ней агрегатов гидромеханической части (ГМЧ САУ) и выполняет управление двигателем по заданным программам.
Электронная часть системы представляет собой вычислительный комплекс, задачей которого является сбор и обработка информации, поступающей в САУ от датчиков, с борта самолета и выдачи управляющих информационных сигналов на исполнительные механизмы агрегатов ГМЧ САУ, электроагрегаты пусковой системы двигателя и в самолетные системы, отображение и регистрация параметров (КИСС, МСРП). Агрегаты ГМЧ
системы по командам исполнительных механизмов осуществляют подачу в камеру сгорания необходимого количества топлива, формируют и выдают управляющие гидравлические воздействия в системы управления механизации компрессора и отбора воздуха из-за КВД.
Для обеспечения надежной работы ГМЧ и ЭЧ САУ в ней предусмотрены:
• подача топлива на вход в НР-90 под оптимальным давлением за счет постановки перед ним подкачивающего насоса ДЦН-94,
• фильтрация на входе в НР-90 топлива через фильтр ОТФ-94-10-807;
• резервирование питания ЭЧ САУ от автономного генератора АГ-0.25Д;
• управление сильноточными исполнительными элементами и агрегатами посредством блока коммутации БК-90;
• двойное резервирование датчиков и электронных каналов управления и наличие в электронном регуляторе РЭД-90 системы встроенного контроля, позволяющей своевременно обнаруживать отказы электрических элементов системы (датчиков, ИМ, ЭМТ, линий их связи с РЭД-90 и каналов управления РЭД-90) и производить их замещение исправными.
При отказах ЭЧ САУ (или при определенном их качестве) и невозможности их парировать путем замещения (без нарушения функционирования САУ или ухудшения качества управления двигателем ниже заданных норм) РЭД-90 выдает сигнал на передачу управления резервной (гидромеханической) САУ двигателя, которая позволяет продолжить полет самолета без ограничений.
ЭГМ САУ состоит из:
• РЭД-90 - регулятор электронный;
• БК-90 - блок коммутации;
• ИСИД-90 - информационная система измерения давления;
• датчиков параметров двигателя, положений элементов САУ;
• электрических исполнительных механизмов и электромагнитных клапанов управления (в составе НР-90);
• АГ-0,25Д - автономный генератор;
• ЭРД-3ВМ 2 серия - автомат защиты двигателя от раскрутки ротора турбины низкого давления;
• ДЦН-94 - подкачивающий центробежный насос;
• ОТФ94-10-807 - основной топливный фильтр;
• НР-90 - насос-регулятор;
• АРТ-90Р - автомата распределения топлива;
• ТД-90 - термодатчик.
БК-90 предназначен для усиления сигналов управления электроагрегатами пусковой системы и коммутации сильноточных цепей электроагрегатов по сигналам от РЭД-90 двигателя или из кабины самолета.
Он обеспечивает также формирование команд на управление ручным запуском двигателя на земле и в воздухе при отказе ОА. БК-90 установлен на двигателе.
ИСИД-90 предназначена для измерения абсолютных давлений на входе в двигатель и за КВД, и выдачи сигналов (в виде последовательного кода) в РЭД-90. ИСИД-90 установлеа на двигателе.
Работу ЭГМ САУ обеспечивают датчики и исполнительные элементы:
• ДЧВ-2500 - (2 шт.) датчик частоты вращения ротора КВД;
• ДЧВ-2500 - (2шт.) датчик частоты вращения ротора вентилятора;
• ДТА-10Е - (2шт.) датчик частоты вращения ротора ТНД;
• Т-99 - (10шт.) датчики температуры газа за ТНД;
• Т-116 - (2шт.) датчики температуры газа за ТНД на запуске;
• ОПП-94 - (2шт.) оптический пирометрический преобразователь температуры рабочих лопаток 1-й ступени ТВД.
ДЦН-90 - подкачивающий центробежный насос интегрального типа обеспечивает необходимую подачу топлива под давлением на вход насоса регулятора НР-90. Насос установлен на коробке приводов.
ОТФ94-10-807 обеспечивает фильтрацию топлива с тонкостью 16 мкм (номинальная) и 25 мкм (абсолютная), поступающего на вход в качающий узел насоса регулятора НР-90.
НР-90 - при работе с-мы управления на ОА предназначен для:
• топливоподачи и управления подачей топлива в камеру сгорания;
• надсистемного ограничения частоты вращения ротора КВД и давления
воздуха за КВД и подвода топлива высокого давления к гидроцилиндрам управления механизацией компрессора и отборами воздуха по сигналам, формируемым РЭД-90 и гидромеханическими регуляторами.
НР-90 установлен на коробке приводов двигателя.
РЭД-90 представляет собой специализированную ЦВМ с неизменяемой программой, работающей в реальном масштабе времени и оснащенную устройствами сопряжения с датчиками и ИМ электронной системы управления и устройствами связи с двигательными и самолетными системами по мультиплексным каналам межмашинного обмена (МКИО).
РЭД-90 предназначен для выполнения логических, управляющих и контролирующих программ, интегрированных с управляющей программой ВСУТ и обеспечивающих управление двигателем на всех режимах его работы во всех условиях эксплуатации, а так же для выдачи информационных сигналов в самолетные системы регистрации и отображения параметров.
Питание РЭД-90 осуществляется от 4-х независимых источников питания:
- по двум каналам АГ-0.25Д
- от двух бортовых сетей.
При этом каждый канал РЭД-90 питается от того из двух своих источников (одного канала АГ-0.25Д и одной б/сети), уровень напряжения которого выше. При последовательном отказе обоих источников питания управляющего канала, в том числе при кратковременном сбое в напряжении б/сети на режиме работы двигателя выше крейсерского, РЭД-90 автоматически переходит на другой управляющий канал. При отказе источника питания 2-го управляющего канала, в том числе, при кратковременном сбое напряжения б/сети, РЭД-90 автоматически передает управление от ОА к РА.
Устройство
В каркас установлены кассеты с платами функциональных узлов регулятора (по одному комплекту на канал).
Спереди: АЦП-Т, ПО, СОЗУ, МЭВМ 90;
Сзади: АнВ, ПСП, Дискр.В, Бл. пит.
На верхней передней крышке под откидными планками размещены 16 регулировочных винтов (по 8 на канал) для настройки характеристик дв-ля.
Состоит из:
1. - устройства ввода информации;
2. - устройства последовательного обмена;
3. - вторичного источника питания (ВИП).
Устройство ввода информации предназначено для приема сигналов датчиков в аналоговой форме (в виде напряжения) и преобразования их в цифровые коды.
Включает в себя:
1. - коммутатор;
2. - АЦП аналого- цифровой преобразователь;
3. - передатчик последовательного кода;
4. - устройство управления - таймер (Т).
Сигналы с датчиков в аналоговой форме последовательно коммутируются на АЦП, преобразуются в цифровой код и по последовательному каналу через устройство обмена поступают в вычислитель для дальнейшей обработки. Работа устройства ввода происходит циклически, независимо от других систем и устройств в соответствии с временной диаграммой, формируемой таймером.
Сигналы датчиков частоты вращения поступают на три усилителя- формирователя импульсов (УФИ) для нормирования входных частотных сигналов, после чего два - через управляемый коммутатор, а третий непосредственно поступают на два преобразователя частота-код, каждый из которых состоит из счетчика числа периодов измеряемой частоты и счетчика кода, соответствующего суммарной длительности заданного числа периодов. Задание числа периодов и считывание полученного кода выполняется программно вычислителем. Сигнал от оптического пирометра обрабатывается устройством БОС ОПЦ, сигнал пульсации Р за компрессором ∴Р/Р - устройством сигнализации помпажа ССП, после чего так же поступают на коммутатор.
Цифровые последовательные коды от системы измерения давления (ИСИД) и системы управления тягой (ВСУТ) поступают через соответствующие приемники (RX) непосредственно в вычислитель.
Вычислитель включает в себя системное оперативное запоминающее устройство (СОЗУ) и три микро-ЭВМ (МЭМВ), каждая из которых имеет в своем составе процессор, постоянное запоминающее устройство (ПЗУ) и оперативное запоминающее устройство (ОЗУ). Все три МЭВМ работают независимо друг от друга. Программа регулирования распределена между всеми тремя МЭВМ; каждая МЭВМ в соответствии с приоритетом (наивысшим обладает МЭВМ1) обращается к СОЗУ, получает от него информацию и, обработав по заложенной программе, помещает результаты расчетов снова в СОЗУ.
Устройство обмена включает в себя 4 приемника последовательного кода и два передатчика последовательного кода:
- приемник RX1 получает информацию от ИСИД;
- приемник RX2 получает информацию от ВСУТ;
- приемник RX3 получает информацию от вычислителя соседнего канала
- приемник RX4 получает информацию с устройства аналогового ввода канала,
- передатчик TX1 предназначен для вывода информации в системы обьекта;
- передатчик TX2 предназначен для передачи вычисленных значений
параметров на устройство аналогового и дискретного вывода канала в соседний канал.
Устройство вывода включает в себя приемник последовательного кода, цифро-аналоговый преобразователь (ЦАП), усилитель тока, усилители дублированных дискретных сигналов и усилители недублированных дискретных сигналов.
После подачи питания на регулятор происходит приоритетное включение 1 канала (при условии отсутствия в нем отказов). В случае обнаружения отказа управление автоматически передается 2 каналу, а при наличии в нем отказов - происходит отключение регулятора.
Вторичный источник питания (ВИП) формирует напряжение питания всех функциональных устройств канала регулятора, датчиков ИСИД, а так же сигнал “НОРМА ПИТАНИЯ” для системы встроенного контроля.
В каждом канале имеется по 8 регулировочных винтов. Винты, регулирующие наиболее ответственные параметры двигателя (RV1, RV2, RV3, RV5), имеют поканальное дублирование, коды остальных винтов передаются в соседний канал регулятора по межканальному обмену.
Время подготовки РЭД-90 после включения составляет 10сек. Регулятор работает циклически, цикл расчета и выдачи управляющих воздействий составляет 20мс.
Все устройства регулятора начинают работать параллельно и одновременно по сигналу начала цикла.
СВК регулятора обеспечивает:
1. - приоритетное включение 1 канала в контур управления по включению питания;
2. - переключение на 2-й (дублирующий) канал при обнаружении:
• отказа ВИП - исчезновение сигнала “Норма питания”;
• аппаратного отказа вычислителя: заклинивание по крайней мере одной из МЭВМ вычислителя, обнаруженное по не сбросу триггера конца программы подтвержденному в течение 4-х циклов;
• программного отказа, обнаруженного в одной из МЭВМ вычислителя;
• сигнала “Дубл. канал РЭД” - по включению экипажем соответствующего тумблера.
Если отказ носит кратковременный характер и работоспособность канала восстанавливается, он становится резервным и может быть опять использован при появлении отказа во втором управляющем канале.
Выключение регулятора из контура (переход на резервный гидромеханический регулятор) происходит при наличии:
• одновременного отказа в обоих каналах по выше приведенным причинам;
• обнаружение программного отказа по перекрестному контролю
результатов вычислений в каналах в случае отсутствия сигналов по обоим каналам.
При этом СВК осуществляет блокировку обратного самопроизвольного включения регулятора в контур управления, снимаемую только по переключению экипажем тумблера “ПИТАНИЕ РЭД”.
В случае недостоверности входных не дублированных дискретных сигналов СВК производит замещение их заранее заданными наиболее безопасными значениями.
Вычисленные значения измеренных датчиками параметров двигателя проверяется на допусковый диапазон физического изменения параметра, на величину рассогласований показаний датчиков между каналами, на допустимый темп изменения показаний датчика за цикл расчета. Параметр отказавшего датчика замещается параметром датчика соседнего канала; отказ датчиков по перекрестному контролю и совместный отказ обоих дублированных датчиков формирует двойной отказ датчика. По двойным отказам датчиков αруд, α ди, α вна, Рвх, Твх, nвд формируется признак программного отказа РЭД, а по двойным отказам датчиков nв, Т тнд, Тл, Рк -- отключение из селекции соответствующих контуров.
При двойном отказе канала измерения Рвх на время наличия сигнала “Предкрылки выпущены” переход на РА (резервную автоматтику) не выполняется.
СВК проверяет коды регулировочных винтов на допустимый диапазон и допустимый темп изменения за цикл. В случае обнаружения отказа дублированного регулировочного винта его код замещается кодом винта соседнего канала, а в случае отказа недублированного винта его значение замещается номинальным кодом.
СВК проверяет соответствие сигналов обратной связи (наличие тока) контролируемых исполнительных механизмов ПС-7, электромагнитов программно-сформированным сигналам управления, в результате отказа формируется признак программного отказа канала.
СВК осуществляет контроль соответствия фактического положения дозатора расхода топлива α ди модельному положению, которое вычислено по заданному значению, а так же контроль соответствия фактического положения исполнительного механизма ВНА заданному положению - на допустимый диапазон. В случае превышения заданной величины формируется признак программного отказа канала.
СВК выполняет сравнение между каналами вычисленных заданных значений положения дозирующей иглы (∴ с) и положения ВНА (α вна); при повышении допустимого диапазона формирует не сброс триггера перекрестного контроля регулятора и отключение его из контура управления.
Указанные выше отказы устанавливаются и снимаются СВК в том случае, если условия для этого имеют место в течение нескольких циклов расчета РЭД. Этим обеспечивается фильтрация сбоев.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 3642; Нарушение авторских прав?; Мы поможем в написании вашей работы!