КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Синхронизирующие объекты ОС
|
|
|
|
Тупики
Приведенный выше пример позволяет также проиллюстрировать еще одну проблему синхронизации — взаимные блокировки, называемые также дедлоками (deadlocks), клинчами (clinch), или тупиками. Покажем, что если переставить местами операции Р(е) и Р(b) в потоке-писателе, то при некотором стечении обстоятельств эти два потока могут взаимно блокировать друг друга, Итак, пусть поток-писатель начинает свою работу с проверки доступности критической секции — операции Р(b), и пусть он первым войдет в критическую секцию. Выполняя операцию Р(е), он может обнаружить отсутствие свободных буферов и перейти в состояние ожидания. Как уже было показано, из этого состояния его может вывести только поток-читатель, который возьмет очередную запись из буфера. Но поток-читатель не сможет этого сделать, так как для этого ему потребуется войти в критическую секцию, вход в которую заблокирован потоком-писателем. Таким образом, ни один из этих потоков не может завершить начатую работу и возникнет тупиковая ситуация, которая не может разрешиться без внешнего воздействия.
Рассмотрим еще один пример тупика. Пусть двум потокам, принадлежащим разным процессам и выполняющимся в режиме мультипрограммирования, для выполнения их работы нужно два ресурса, например принтер и последовательный порт. Такая ситуация может возникнуть, например, во время работы приложения, задачей которого является распечатка информации, поступающей по модемной связи.
На рис. 4.22, а показаны фрагменты соответствующих программ. Поток А запрашивает сначала принтер; а затем порт, а поток В запрашивает устройства в обратном порядке. Предположим, что после того, как ОС назначила принтер потоку А и установила связанную с этим ресурсом блокирующую переменную, поток А был прерван. Управление получил поток В, который сначала выполнил запрос на получение СОМ- порта, затем при выполнении следующей команды был заблокирован, так как принтер оказался уже занятым потоком А. Управление снова получил поток А, который в соответствии со своей программой сделал попытку занять порт и был заблокирован, поскольку порт уже выделен потоку В. В таком положении потоки А и В могут находиться сколь угодно долго.
В зависимости от Соотношения скоростей потоков они могут либо взаимно блокировать друг друга (рис. 4.22, б), либо образовывать очереди к разделяемым ресурсам (рис. 4.22, в), либо совершенно независимо использовать разделяемые ресурсы (рис. 4.22, г).
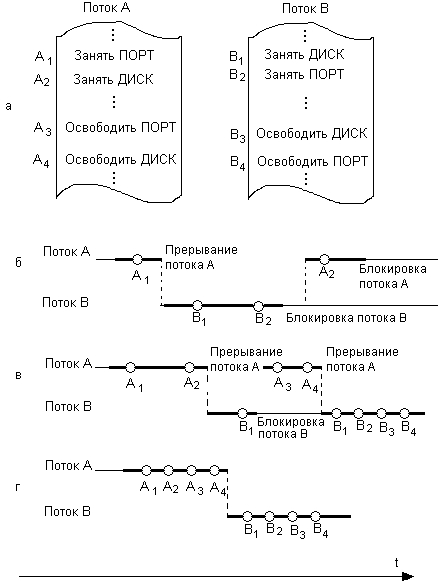
Рис. 4.22. Возникновение взаимных блокировок при выполнении программы
ПРИМЕЧАНИЕ
Тупиковые ситуации надо отличать от простых очередей* хотя те и другие возникают при совместном использовании ресурсов и внешне выглядят похоже: поте* приостанавливается и ждет освобождения ресурса. Однако очередь — это нормальное явление, неотъемлемый признак высокого коэффициента использования ресурсов при случайном поступлении запросов. Очередь появляется тогда, когда ресурс недоступен в данный момент, но освободится через некоторое время, позволив потоку продолжить выполнение. Тупик же, что видно из его названия, является в некотором роде неразрешимой ситуацией. Необходимым условием возникновения тупика является потребность потока сразу в нескольких ресурсах.
В рассмотренных примерах тупик был образован двумя потоками, но взаимно блокировать друг друга может и большее число потоков. На рис. 2.23 показано такое распределение ресурсов Ri между несколькими потоками Tj, которое привело к возникновению взаимных блокировок. Стрелки обозначают потребность потока в ресурсах. Сплошная стрелка означает, что соответствующий ресурс был выделен потоку, а пунктирная стрелка соединяет поток с тем ресурсом, который необходим, но не может быть пока выделен, поскольку занят другим потоком. Например, потоку Т1 для выполнения работы необходимы ресурсы R1 и R2, из которых выделен только один — R1, а ресурс R2 удерживается потоком Т2. Ни один из четырех показанных на рисунке потоков не может продолжить свою работу, так как не имеет всех необходимых для этого ресурсов.
Невозможность потоков завершить начатую работу из-за возникновения взаимных блокировок снижает производительность вычислительной системы. Поэтому проблеме предотвращения тупиков уделяется большое внимание. На тот случай, когда взаимная блокировка все же возникает, система должна предоставить администратору-оператору средства, с помощью которых он смог бы распознать тупик, отличить его от обычной блокировки из-за временной недоступности ресурсов. И наконец, если тупик диагностирован, то нужны средства для снятия взаимных блокировок и восстановления нормального вычислительного процесса.
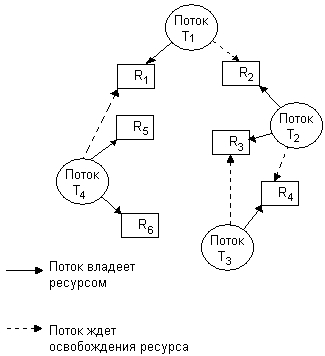
Рис. 4.23. Взаимная блокировка нескольких потоков
Тупики могут быть предотвращены на стадии написания программ, то есть программы должны быть написаны таким образом, чтобы тупик не мог возникнуть при любом соотношении взаимных скоростей потоков. Так, если бы в примере, показанном на рис. 4.22, поток А и поток В запрашивали ресурсы в одинаковой последовательности, то тупик был бы>в принципе невозможен. Другой, более гибкий подход к предотвращению тупиков заключается в том, что ОС каждый раз при запуске задач анализирует их потребности в ресурсах и определяет, может ли в данной мультипрограммной смеси возникнуть тупик. Если да, то запуск новой задачи временно откладывается. ОС может также использовать определенные правила при назначении ресурсов потокам, например, ресурсы могут выделяться операционной системой в определенной последовательности, общей для всех потоков.
В тех же случаях, когда тупиковую ситуацию не удалось предотвратить, важно быстро и точно ее распознать, поскольку блокированные потоки не выполняют никакой полезной работы. Если тупиковая ситуация образована множеством потоков, занимающих массу ресурсов, распознавание тупика является нетривиальной задачей. Существуют формальные, программнореализованные методы распознавания тупиков, основанные на ведении таблиц распределения ресурсов и таблиц запросов к занятым ресурсам. Анализ этих таблиц позволяет обнаружить взаимные блокировки.
Если же тупиковая ситуация возникла, то не обязательно снимать с выполнения все заблокированные потоки/Можно снять только часть из них, освободив ресурсы, ожидаемые остальными потоками, можно вернуть некоторые потоки в область подкачки, можно совершить -«откат» некоторых потоков до так называемой контрольной точки, в которой запоминается вся информация, необходимая для восстановления выполнения программы с данного места. Контрольные точки расставляются в программе в тех местах, после которых возможно возникновение тупика.
Рассмотренные выше механизмы синхронизации, основанные на использовании глобальных переменных процесса, обладают существенным недостатком — они не подходят для синхронизации потоков разных процессов. В таких случаях операционная система должна предоставлять потокам системные объекты синхронизации, которые были бы видны для всех потоков, даже если они принадлежат / разным процессам и работают в разных адресных пространствах.
Примерами таких синхронизирующих объектов ОС являются системные семафоры, мьютексы, события, таймеры и другие — их набор зависит от конкретной ОС, которая создает эти объекты по запросам процессов. Чтобы процессы могли разделять синхронизирующие объекты, в разных ОС используются разные методы. Некоторые ОС возвращают указатель на объект. Этот указатель может быть доступен всем родственным Процессам, наследующим характеристики общего родительского процесса. В других ОС процессы в запросах на создание объектов синхронизации указывают имена, которые должны быть им присвоены. Далее эти имена используются разными процессами для манипуляций объектами синхронизации. В таком, случае работа с синхронизирующими объектами подобна работе с файлами. Их можно создавать, открывать, закрывать, уничтожать.
Кроме того, для синхронизации могут быть использованы такие «обычные» объекты ОС, как файлы, процессы и потоки. Все эти объекты могут находиться в двух состояниях: сигнальном и несигнальном — свободном. Для Каждого объекта смысл, вкладываемый в понятие «сигнальное состояние», зависит от типа объекта. Так, например, поток переходит в сигнальное состояние тогда, когда он завершается. Процесс переходит в сигнальное состояние тогда, когда завершаются все его потоки. Файл переходит в сигнальное состояние в том случае, когда завершается операция ввода-вывода для этого файла. Для остальных объектов сигнальное состояние устанавливается в результате выполнения специальных системных вызовов. Приостановка и активизация потоков осуществляются в зависимости от состояния синхронизирующих объектов ОС.
Потоки с помощью специального системного вызова сообщают операционной системе о том, что они хотят синхронизировать свое выполнение с состоянием некоторого объекта. Будем далее называть этот системный вызов Wait(X), где X — указатель на объект синхронизации. Системный вызов, с помощью которого поток может перевести объект синхронизации в сигнальное состояние, назовем Set(X).
Поток, выполнивший системный вызов Wait(X), переводится операционной системой в состояние ожидания до тех пор, пока объект X не перейдет в сигнальное состояние. Примерами системных вызовов типа Wait() и Set() являются вызовы WaitForSingleObject() и SetEvent() в Windows NT, DosSenWait() и OosSemSet() в OS/2, sleep() и wakeup() в UNIX.
Поток может ожидать установки сигнального состояния не одного объекта, а нескольких. При этом поток может попросить ОС активизировать его при установке либо одного из указанных объектов, либо всех объектов. Поток может в качестве аргумента системного вызова Wait() указать также максимальное время, которое он будет ожидать перехода объекта в сигнальное состояние, после чего ОС должна его активизировать в любом случае. Может случиться, что установки некоторого объекта в сигнальное состояние ожидают сразу несколько потоков. В зависимости от объекта синхронизации в состояние готовности могут переводиться либо все ожидающие это событие потоки, либо один из них.
Синхронизация тесно связана с планированием потоков, Во-первых, любое обращение потока с системным вызовом Wait(X) влечет за собой действия в подсистеме планирования — этот поток снимается с выполнения и помещается в очередь ожидающих потоков, а из очереди готовых потоков выбирается и активизируется новый поток. Во-вторых, при переходе объекта в сигнальное состояние (в результате выполнения некоторого потока — либо системного, либо прикладного) ожидающий этот объект поток (или потоки) переводится в очередь готовых к выполнению потоков. В обоих случаях осуществляется перепланирование потоков, при этом если в ОС предусмотрены изменяемые приоритеты и/или кванты времени, то они пересчитываются по правилам, принятым в этой операционной системе.
Рассмотрим несколько примеров, когда в качестве синхронизирующих объектов используются файлы, потоки и процессы.
Пусть программа приложения построена так, что для выполнения запросов, поступающих из сети, основной поток создает вспомогательные серверные потоки.
При поступлении.от.пользователя команды завершения приложения основной поток должен дождаться завершения всех серверных потоков и только после этого завершиться сам. Следовательно, процедура завершения должна включать вызов Wait(Xl, Х2,...), где XI, Х2 — указатели на серверные потоки. В результате выполнения данного системного вызова основной поток будет переведен в состояние ожидания и останется в нем до тех пор, пока все серверные потоки не перейдут в сигнальное состояние, то есть завершатся. После этого OG переведет основной поток в состояние готовности. При получении доступа к процессору основной поток завершится.
Другой пример. Пусть выполнение некоторого приложения требует последовательных работ-этапов. Для каждого этапа имеется свой отдельный процесс. Сигналом для начала работы каждого следующего процесса является завершение предыдущего. Для реализации такой логики работы необходимо в каждом процессе, кроме первого, предусмотреть выполнение системного вызова Wait(X), в котором синхронизирующим объектом является предшествующий поток.
Объект-файл, переход которого в сигнальное состояние соответствует завершению операции ввода-вывода с этим файлом, используется в тех случаях, когда поток, инициировавший эту операцию, решает дождаться ее завершения, прежде чем продолжить свои вычисления.
Однако круг событий, е которыми потоку может потребоваться синхронизировать свое выполнение, отнюдь не исчерпывается завершением потока, процесса иди операции ввода-вывода. Поэтому в ОС, как правило, имеются и другие, более универсальные объекты синхронизации, такие как событие (event), мъютекс (nmtex), системный семафор и другие.
Мьютекс, как и семафор, обычно используется для управления доступом к данным.
В отличие от объектов-потоков, объектов-процессов и объектов-файлов, которые при переходе в сигнальное состояние переводят в состояние готовности все потоки, ожидающие этого события, объект - мьютекс «освобождает» из очереди ожидающих только один поток.
Работа мьютекса хорошо поясняется в терминах «владения». Пусть поток, который, пытаясь получить доступ к критическим данным, выполнил системный вызов Wait(X), где X — указатель на мьютекс. Предположим, что мьютекс находится в сигнальном состоянии, в этом случае поток тут же становится его владельцем, устанавливая его в несигнальное состояние, и входит в критическую секцию. После того как поток выполнил работу с критическими данными, он «отдает» мьютекс, устанавливая его в сигнальное состояние. В этот момент мьютекс свободен и не принадлежит ни одному потоку. Если какой-либо поток ожидает его освобождения, то он становится следующим владельцем этого мьютекса, одновременно мьютекс переходит в несигнальное состояние.
Объект-событие (в данном случае слово «событие» используется в узком смысле, как обозначение конкретного вида объектов синхронизации) обычно используется не для доступа к данным, а для того, чтобы оповестить другие потоки о том, что некоторые действия завершены. Пусть, например, в некотором приложении работа организована таким образом, что один поток читает данные из файла в буфер памяти, а другие потоки обрабатывают эти данные, затем первый поток считывает новую порцию данных, а другие потоки снова ее обрабатывают и так далее. В начале работы первый поток устанавливает объект-событие в несигнальное состояние. Все остальные потоки выполнили вызов Wait(X), где X — указатель события, и находятся в приостановленном состоянии, ожидая наступления этого события. Как только буфер заполняется, первый поток сообщает об этом операционной системе, выполняя вызов Set(X). Операционная система просматривает очередь ожидающих потоков и активизирует все потоки, которые ждут этого события.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 488; Нарушение авторских прав?; Мы поможем в написании вашей работы!