КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЛЕКЦИЯ 2-3. «Клиническая психология» 030302
|
|
|
|
Новосибирск - 2012
ЛЕКЦИЯ № 3
ПО ДИСЦИПЛИНЕ
«экономика»
Ф.11
По специальности
«Клиническая психология» 030302
Форма обучения – очная
Раздел 2. Микроэкономика
1. Фирма как экономический субъект
2. Формы организации предпринимательской деятельности
3. Фирма как несовершенный конкурент
Составил преподаватель:
Карманова Н.Е.
ТЕМА 2. Основы построения механизмов.
Краткое содержание: Классификация и виды механизмов. Рычажные механизмы и их структурные схемы. Структура механизмов. Понятие о структурном анализе и синтезе. Основные понятия структурного синтеза и анализа: Число степеней свободы механизма. Обобщенные координаты и начальные звенья механизма. Основные структурные формулы. Структурная классификация механизмов по Ассуру. Пример структурного анализа.
Контрольные вопросы к теме «Основы построения механизмов».
Классификация и виды механизмов.
Механизмы классифицируются по следующим признакам:
1. По области применения и функциональному назначению.
2. по виду передаточной функции на механизмы:
o с постоянной передаточной функцией;
o с переменной передаточной функцией:
§ с нерегулируемой (синусные, тангенсные);
§ с регулируемой:
§ со ступенчатым регулированием (коробки передач);
§ с бесступенчатым регулированием (вариаторы).
3. по виду преобразования движения на механизмы преобразующие:
o вращательное во вращательное:
§ редукторы wвх > wвых;
§ мультипликаторы wвх < wвых;
§ муфты wвх = wвых;
o вращательное в поступательное;
o поступательное во вращательное;
o поступательное в поступательное.
4. по движению и расположению звеньев в пространстве:
o пространственные;
o плоские;
o сферические.
Все механизмы являются пространственными механизмами, часть механизмов, звенья которых совершают движение в плоскостях параллельных одной плоскости, являются одновременно и плоскими, другая часть механизмов, звенья которых движутся по сферическим поверхностям экивидистантным какой-либо одной сфере, являются одновременно и сферическими.
5. по изменяемости структуры механизма на механизмы:
o с неизменяемой структурой;
o с изменяемой структурой.
В процессе работы кривошипно-ползунного механизма насоса его структурная схема все время остается неизменной. В механизмах манипуляторов в процессе работы структурная схема механизма может изменяться. Так если промышленный робот выполняет сборочные операции, например, вставляет цилиндрическую деталь в отверстие, то при транспортировке детали его манипулятор является механизмом с открытой или разомкнутой кинематической цепью. В тот момент, когда деталь вставлена в отверстие, кинематическая цепь замыкается, структура механизма изменяется, подвижность уменьшается на число связей во вновь образованной кинематической паре деталь-стойка.
| |
| Рис. 2.1 |
6. по числу подвижностей механизма:
o с одной подвижностью W=1;
o с несколькими подвижностями W>1:
§ суммирующие (интегральные);
§ разделяющие (дифференциальные).

|
| Рис. 2.2 |
7. по виду кинематических пар (КП):
o с низшими КП (все КП механизма низшие);
o с высшими КП (хотя бы одна КП высшая);
o шарнирные (все КП механизма вращательные - шарниры).
8. по способу передачи и преобразования потока энергии:
o фрикционные (сцепления);
o зацеплением;
o волновые (создание волновой деформации);
o импульсные.
9. по форме, конструктивному исполнению и движению звеньев:
o рычажные (рис. 2.7);
o зубчатые (рис. 2.8);
o кулачковые (рис. 2.4);
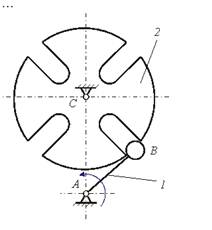
o мальтийские (2.5)
o планетарные (рис. 2.6);
o манипуляторы (рис. 2.1.).
| 
|
| Рис. 2.3 | Рис. 2.4 |
| 
|
| Рис. 2.5 | Рис. 2.6 |
Структурные схемы рычажных механизмов
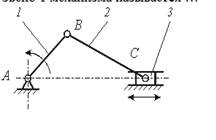
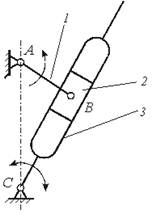
Кривошипно-ползунный Кулисный Шарнирный 4-х звенник
Рис. 2.7
Структура механизмов.
Под структурой механизма понимается совокупность его элементов и отношений между ними, т.е. совокупность звеньев, групп или типовых механизмов и подвижных или неподвижных соединений. Геометрическая структура механизма полностью описывается заданием геометрической формы его элементов, их расположения, указания вида связей между ними. Структура механизма может быть на разных стадиях проектирования описываться различными средствами, с разным уровнем абстрагирования: на функциональном уровне - функциональная схема, на уровне звеньев и структурных групп - структурная схема и т.п.
Структурная схема - графическое изображение механизма, выполненное с использованием условных обозначений рекомендованных ГОСТ (см. например ГОСТ 2.703-68) или принятых в специальной литературе, содержащее информацию о числе и расположении элементов (звеньев, групп), а также о виде и классе кинематических пар, соединяющих эти элементы. В отличие от кинематической схемы механизма, структурная схема не содержит информации о размерах звеньев и вычерчивается без соблюдения масштабов. На схеме принято звенья отмечать арабскими цифрами, причем нумерацию начинают с входного звена, дальше в порядке передачи движения, стойке присваивается цифра «ноль». Кинематические пары обозначаются буквами латинского алфавита, рядом указывается вид КП.
Кинематическая схема - графическая модель механизма, предназначенная для исследования его кинематики. Кинематическая схема строится с соблюдением масштаба и форм звеньев.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 259; Нарушение авторских прав?; Мы поможем в написании вашей работы!