КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Біполярні й уніполярні КД
|
|
|
|
Залежно від конфігурації обмоток двигуни діляться на біполярні й уніполярні. Біполярний двигун має одну обмотку в кожній фазі, яка для зміни напрямку магнітного поля повинна драйвером змінити полюс. Для такого типу двигуна потрібен мостовий драйвер, або напівмостовий із двополярним живленням. Усього біполярний двигун має дві обмотки й, відповідно, чотири виводи (рис.7.43, а).
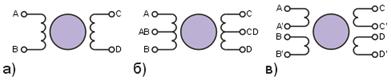
Рис. 7.43. Обмотки біполярного й уніполярного КД.
Уніполярний двигун також має одну обмотку в кожній фазі, але від середини обмотки зроблений відвід. Це дозволяє змінювати напрямок магнітного поля, створюваного обмоткою, простим перемиканням половинок обмотки. При цьому суттєво спрощується схема драйвера. Драйвер повинен мати тільки 4 простих ключа. Таким чином, в уніполярному двигуні використовується інший спосіб зміни напрямку магнітного поля. Середні виводи обмоток можуть бути об'єднані усередині двигуна, тому такий двигун може мати 5 або 6 виводів (рис.7.43, б). Іноді уніполярні двигуни мають роздільні 4 обмотки, із цієї причини їх помилково називають 4-х фазними двигунами. Кожна обмотка має окремі виводи, тому всього виводів 8 (рис.7. 43, в). При відповідному з'єднанні обмоток такий двигун можна використовувати як уніполярний або як біполярний. Уніполярний двигун із двома обмотками й відводами теж можна використовувати в біполярному режимі, якщо відводи залишити непідключеними. У кожному разі струм обмоток слід вибирати так, щоб не перевищити максимальної потужності, що розсіюється.
Біполярний або уніполярний?
Якщо порівнювати між собою біполярний і уніполярний двигуни, то біполярний має більш високу питому потужність. При тих самих розмірах біполярні двигуни забезпечують більший момент.
Момент, створюваний кроковим двигуном, пропорційний величині магнітного поля, створюваного обмотками статора. Шлях для підвищення магнітного поля – це збільшення струму або числа витків обмоток. Природнім обмеженням при підвищенні струму обмоток є небезпека насичення залізного сердечника. Однак на практиці це обмеження діє рідко. Набагато більш істотним є обмеження по нагріванню двигуна внаслідок омічних втрат в обмотках. Саме цей факт і демонструє одне з переваг біполярних двигунів. В уніполярному двигуні в кожний момент часу використовується лише половина обмоток. Інша половина просто займає місце у вікні сердечника, що змушує робити обмотки проведенням меншого діаметра. У той же час у біполярному двигуні завжди працюють усі обмотки, тобто їхнє використання оптимальне. У такому двигуні перетин окремих обмоток удвічі більше, а омічний опір – відповідно вдвічі менше. Це дозволяє побільшати струм у корінь із двох раз при тих же втратах, що дає виграш у моменті приблизно 40%. Якщо ж підвищеного моменту не потрібно, уніполярний двигун дозволяє зменшити габарити або просто працювати з меншими втратами. На практиці все-таки часто застосовують уніполярні двигуни, тому що вони вимагають значно більш простих схем керування обмотками. Це важливо, якщо драйвери виконані на дискретних компонентах. У цей час існують спеціалізовані мікросхеми драйверів для біполярних двигунів, з використанням яких драйвер виходить не складніше, чим для уніполярного двигуна.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1317; Нарушение авторских прав?; Мы поможем в написании вашей работы!