КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Устойчивость прямолинейного движения
|
|
|
|
Устойчивость движения автомобиля в значительной мере определяется траекторией и курсовой устойчивостью, которые зависят в первую очередь от увода осей (типа поворачиваемости автомобиля), степени стабилизации управляемых колес и их склонности к колебаниям и автоколебаниям.
При прямолинейном движении на автомобиль действует не только сила тяги, силы сопротивления и управляющие силы, но разного рода случайные силы (возмущения).
Любые посторонние боковые силы, действующие на колеса, изменяют направление их движения по сравнению с заданным водителем (если силы малы, то результаты увода, а если достаточно велики - то скольжения) и изменяют курсовое положение автомобиля.
Энергия, затрачиваемая боковыми силами на боковое смещение колес при уводе, так и при скольжении, теряется безвозвратно. Поэтому сами боковые отклонения являются необратимыми. В результате изменения направления качения колес изменяется и курсовой угол  , причем без дополнительного управляющего воздействия автомобиль не может возвратиться к прежнему положению. Следовательно, по курсовому углу автомобиль, как чисто механическая система, всегда неустойчив.
, причем без дополнительного управляющего воздействия автомобиль не может возвратиться к прежнему положению. Следовательно, по курсовому углу автомобиль, как чисто механическая система, всегда неустойчив.
Неустойчивость проявляется по-разному. У одних автомобилей после прекращения возмущений курсовой угол стабилизируется, не возвращаясь к прежнему, но и не увеличивает своего отклонения, у других - отклонение продолжается и после прекращения возмущения.
Исследуем прямолинейное вращение автомобилей, обладающих разными типами поворачиваемости.
а) Автомобиль с нейтральной поворачиваемостью.
Схема движения автомобиля, обладающего нейтральной поворачиваемостью, при действии боковой силы
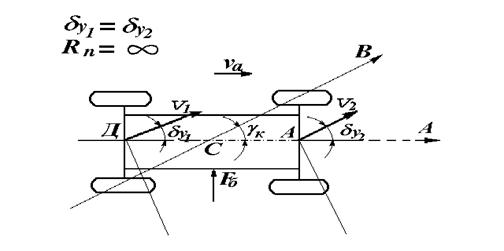 Рис. 11.
Рис. 11.
Предположим, что на автомобиль, двигающийся прямолинейно, начала действовать боковая сила  . В результате ее действия возникнет боковой увод передней и задней оси автомобиля.
. В результате ее действия возникнет боковой увод передней и задней оси автомобиля.
В этом случае, вследствие того, что  , автомобиль будет двигаться прямолинейно, но по направлению ВВ, т.е.. под некоторым углом
, автомобиль будет двигаться прямолинейно, но по направлению ВВ, т.е.. под некоторым углом  ) к направлению движения, заданному водителем (направлению АА). Таким образом, автомобиль получит смещение в боковом направлении.
) к направлению движения, заданному водителем (направлению АА). Таким образом, автомобиль получит смещение в боковом направлении.
Поскольку векторы поступательных скоростей передней и задней оси V1 и V2 параллельны, то  = бесконечности.
= бесконечности.
Для движения автомобиля по направлению AA водитель должен повернуть управляемые колеса в противоложную сторону (в данном случае вправо), на такой угол, чтобы продольная ось автомобиля составила с направлением угол, равный углу .
б) Автомобиль с недостаточной поворачиваемостью  .
.
Допустим, что на прямолинейно движущийся автомобиль действует боковая сила . Так как , то направления качения колес передней не совпадают и, следовательно, автомобиль начинает двигаться криволинейно, поворачивая относительно некоторого центра 0, при этом возникает центробежная сила  , поперечная составляющая которой
, поперечная составляющая которой  , направлена навстречу боковой силе . В результате этого увод колес передней и задней осей быстро уменьшается и автомобиль практически сохраняет прямолинейное движение.
, направлена навстречу боковой силе . В результате этого увод колес передней и задней осей быстро уменьшается и автомобиль практически сохраняет прямолинейное движение.

Рис.12. Cхема движения автомобиля, обладающего недостаточной поворачиваемостью, при действии на него боковой силы
в) Автомобиль с избыточной поворачиваемостью ( ).
).

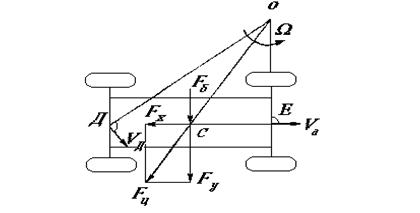
Рис. 13. Схема движения автомобиля, обладающего избыточной поворачиваемостью
Допустим, что на прямолинейно движущийся автомобиль действует боковая сила . Так как , то направления качения колес передней и задней осей не совпадают, следовательно, автомобиль начинает двигаться криволинейно, поворачивая относительно некоторого центра 0.
При этом возникает центробежная сила , поперечная составляющая которой Fy ,направлена в ту же сторону, что и боковая сила , вызывающая увод колес и криволинейное движение автомобиля.
В этом случае сумма сил  . Вызывает увеличение увода колес передней и задней осей, что ведет к увеличению кривизны траектории движения, т.е. к уменьшению радиуса поворота. В определенных условиях это может привести к заносу и опрокидыванию автомобиля.
. Вызывает увеличение увода колес передней и задней осей, что ведет к увеличению кривизны траектории движения, т.е. к уменьшению радиуса поворота. В определенных условиях это может привести к заносу и опрокидыванию автомобиля.
Для оценки влияния увода мостов автомобиля на его курсовую и траекторную устойчивость рассмотрим движение автомобиля по кругу большого диаметра с постоянной скоростью.
Схема, сил действующих на автомобиль при движении по кругу
Для упрощения не учитываем действие силы тяги и сил сопротивления движению автомобиля.
В этом случае на автомобиль действует только центробежная сила , которая приложена в центре масс
Боковые реакции дороги, действующие на колеса автомобиля определяются по формулам:
 ;
;  (7)
(7)
где  - часть полной массы автомобиля, приходящаяся соответственно на переднюю и заднюю ось;
- часть полной массы автомобиля, приходящаяся соответственно на переднюю и заднюю ось;
 - скорость движения автомобиля на повороте;
- скорость движения автомобиля на повороте;
- радиус поворота автомобиля с учетом бокового увода колес.
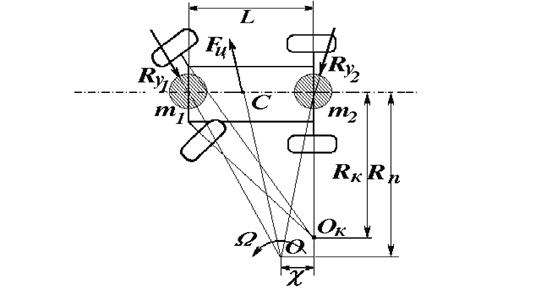
Рис. 14.
Определяется из выражения:
 (8)
(8)
где  - база автомобиля;
- база автомобиля;
 - средний угол поворота управляемых колес;
- средний угол поворота управляемых колес;
 - угол увода, соответственно передней и задней оси.
- угол увода, соответственно передней и задней оси.
 ;
;  ; (9)
; (9)
где  - коэффициенты сопротивления боковому уводу, соответственно передней и задней оси.
- коэффициенты сопротивления боковому уводу, соответственно передней и задней оси.
Из формулы (7), (8), (9) после преобразований получим:

|
где  - кинематический радиус поворота автомобиля.
- кинематический радиус поворота автомобиля.
(Радиус поворота автомобиля при качении колес без бокового увода)
 (11)
(11)
Из выражения (10) следует, что в общем случае радиус поворота автомобиля зависит не только от среднего угла поворота управляемых колес , но и от скорости движения .
Исследуем прямолинейное движение двухосного автомобиля, обладающего избыточной поворачиваемостью.
Предположим, что на автомобиль действует какая -то боковая сила. Преобразуем выражение (10), умножив его левую и правую части на угол . Получим:
 . (12)
. (12)
При повышении скорости движения автомобиля углы увода передней и задней осей 
 и возрастают, причем
и возрастают, причем  .
.
Следует ожидать, что при некоторой скорости, называемой критической скоростью по курсовой устойчивости ( ), правая часть выражения (12) будет равна нулю:
), правая часть выражения (12) будет равна нулю:
 (13)
(13)
В этом случае даже при незначительном боковом толчке и нейтральном положении управляемых колес ( ) возникает быстронарастающий увод,, приводящий к заносу автомобиля. (
) возникает быстронарастающий увод,, приводящий к заносу автомобиля. ( ), т.е. автомобиль теряет курсовую устойчивость.
), т.е. автомобиль теряет курсовую устойчивость.
Критическая скорость автомобиля по курсовой устойчивости определяется из следующего выражения:
 14)
14)
Анализируя выражение (14), можно сделать выводы:
1). Критическую скорость по курсовой устойчивости можно определить только для автомобиля с избыточной поворачиваемостью, у которого
 или
или 
2). Критическая скорость по курсовой устойчивости для автомобиля с нейтральной поворачиваемость равна бесконечности, т.к.
 или
или 
3) Критическая скорость по курсовой устойчивости для автомобиля для автомобиля с недостаточной поворачиваемостью не существует т.к.
 или
или 
и подкоренное выражение имеет отрицательное значение.
Таким образом, критическая скорость по курсовой устойчивости характеризует предел устойчивого прямолинейного движения автомобиля, обладающего избыточной поворачиваемостью.
Для повышения устойчивости движения необходимо стремиться к тому, чтобы автомобиль обладал либо недостаточной поворачиваемостью, либо его критическая скорость по курсовой устойчивости была бы не более высокой и находилась бы за пределами реальной скорости автомобиля.
Изучив устойчивость прямолинейного движения автомобиля на горизонтальном участке дороги, рассмотрим его устойчивость при прямолинейном движении по косогору.
ЛЕКЦИЯ 17
Устойчивость автомобиля при движении на повороте.
Потеря автомобилем поперечной устойчивости наиболее вероятно при движении на повороте или при движении по косогору.
При движении на повороте возможен занос и опрокидывание автомобиля, а при движении по косогору - боковое скольжение (сползание) и опрокидывание.
Рассмотрим занос и опрокидывание автомобиля на повороте.
2.1. Занос и опрокидывание автомобиля на повороте.
Занос и опрокидывание автомобиля на повороте происходит, как правило, под действием центробежной силы.
Рассмотрим схему сил, действующих на автомобиль при совершении поворота.

Рис. 15
Обозначим:  - нормальные реакции опорной поверхности, действующие на колеса собственно левого и правого борта.
- нормальные реакции опорной поверхности, действующие на колеса собственно левого и правого борта.
- боковые реакции опорной поверхности, действующие на колеса собственно левого и правого борта.
Центробежная сила при повороте автомобиля с радиусом может быть определена из выражения:
 , (15)
, (15)
где m - полная масса автомобиля;
V - поступательная скорость движения автомобиля.
Разложим центробежную силу на составляющие: продольную силу Fx и поперечную Fy. Поперечная составляющая центробежной силы Fy стремится вызвать поперечное скольжение и опрокидывание автомобиля. Приблизительно можно принять, что
 , (16)
, (16)
Опрокидывание автомобиля наступит при условии, что момент, создаваемый силой Fy относительно т.A будет равен или превысит момент, создаваемый силой веса автомобиля G относительно этой точки, то есть
 (17)
(17)
где  - высота центра масс автомобиля;
- высота центра масс автомобиля;
Bк - ширина колеи автомобиля.
Если в выражение () подставить значение Fц, а вес G выразить через массу и ускорение свободного падения, то можно определить скорости, при которых происходит опрокидывание автомобиля на повороте:
 (18)
(18)
Наименьшая скорость движения, которая соответствует возникновению опрокидывания автомобиля на повороте, называется критической скоростью по опрокидыванию.
 или
или 
Из полученного выражения следует, что критическая скорость по опрокидыванию зависит от радиуса поворота Rn, ширины колеи Bк и высоты центра масс hg автомобиля. Чем меньше радиус поворота и выше расположен центр тяжести, тем при меньшей скорости произойдет опрокидывание автомобиля.
Опрокидывание автомобиля возможно только в том случае, если его колеса имеют достаточное сцепление с дорогой. В противном случае будет иметь место не опрокидывание, а занос.
Боковое скольжение (занос) автомобиля начнется в тот момент, когда составляющая сила Fy и равная ей сумма боковых реакций опорной поверхности  достигнет или станет больше величины силы сцепления
достигнет или станет больше величины силы сцепления  , т.е.
, т.е.
 , (19)
, (19)
где j - коэффициент сцепления;
G - вес автомобиля.
Подставим в выражение (19) значение составляющей центробежной силы Fy. После преобразований получим выражение для определения скоростей, при которых происходит занос автомобиля на повороте.

Наименьшая скорость движения, которая соответствует возникновению бокового скольжения (заноса) автомобиля на повороте называется критической скоростью по заносу.
 (20)
(20)
Из полученного выражения следует, что критическая скорость по заносу зависит от сцепления колес с опорной поверхностью (коэффициент сцепления) и величины радиуса поворота Rn.
Таким образом, действующая на автомобиль при повороте центробежная сила может вызвать либо его занос, либо его опрокидывание. Так как опрокидывание более опасно чем занос, то автомобиль должен быть сконструирован таким образом, чтобы опрокидыванию всегда предшествовал занос, т.е. выполнялось  . Подставив данное выражение значения скоростей
. Подставив данное выражение значения скоростей  и
и  получим:
получим:
После преобразований получим условие, при котором занос предшествует опрокидыванию:
 или
или 
Из выражения (21) следует, что опрокидывание автомобиля невозможно, если коэффициент сцепления колес с опорной поверхностью меньше коэффициента поперечной устойчивости.
Значение коэффициента поперечной устойчивости для автомобилей с грузом находятся в пределах:
грузовые автомобили 0,55...0,8
легковые автомобили......0,9...1,2
автобусы 0,5...0,65
Максимальные значения коэффициента сцепления находятся в пределах 0,6...0,8.
Таким образом, опрокидывание автомобиля на горизонтальном участке дороги с ровным покрытием невозможно, а возможен только его занос.
Однако, учитывая наличие на дороге неровностей, в которые могут упираться колеса автомобиля при боковом скольжении, а также наличие бордюрных камней, кюветов и т.п., занос может привести к опрокидыванию автомобиля.
Для повышения скорости и обеспечения безопасности движения автомобилей на поворотах закругления дорог могут выполнятся с поперечным уклоном. Такие закругления называются виражами. Дорогу в этом случае можно рассматривать как часть внутренней поверхности конуса, ось которой вертикальна.
При повороте автомобиля на вираже опрокидывающей силой будет составляющая центробежной силы

где b - угол поперечного уклона дороги (угол виража).
Схема сил, действующих на автомобиль при движении на вираже.
Опрокидывание автомобиля наступит в том случае, когда внутренние по отношению к центру поворота колеса оторвутся от опорной поверхности, т.е. нормальные реакции опорной поверхности, действующие на эти колеса станут равны нулю:
 и
и 
В этом случае:

Разделим левую и правую части уравнения на G cosb. После преобразования получим:
 (22)
(22)
Из полученного выражения можно определить критическую скорость по опрокидыванию при движении автомобиля на вираже
 (23)
(23)
Рис.16
Анализ выражений(18) и (23) показывает, что опрокидывание автомобиля при движении на повороте по дороге с поперечным уклоном может наступить при большей скорости, чем при повороте на горизонтальном участке.
Занос автомобиля на вираже как и опрокидывание, также будет происходить при большей скорости, поскольку боковое скольжение автомобиля начнется при условии:
 (24)
(24)
Критическая скорость по заносу автомобиля, совершающего поворот на вираже, определяется из выражения:
 (25)
(25)
Анализ выражений (20) и (25) позволяет сделать вывод, что с увеличением угла поперечного уклона дороги b скорость движения автомобиля по условию заноса увеличивается.
При  знаменатель выражения (25)
знаменатель выражения (25)  будет равен 0 и, следовательно, критическая скорость по заносу становится равной бесконечности. В этом случае автомобиль сохраняет устойчивость при любой скорости.
будет равен 0 и, следовательно, критическая скорость по заносу становится равной бесконечности. В этом случае автомобиль сохраняет устойчивость при любой скорости.
Выражение (23) и (25) используются при расчетах виражей на скоростных трассах.
Выше поперечная устойчивость автомобиля рассматривалась в предположении, что при заносе на повороте колеса обоих мостов начинают скользить в поперечном направлении одновременно. Обычно начинают скользить колеса одного моста (заднего или переднего), вследствие чего приходится рассматривать устойчивость не всего автомобиля, а одного из его мостов.
Занос заднего и переднего мостов автомобиля. Меры борьбы с заносом.
Прежде чем рассматривать занос заднего или переднего мостов, исследуем влияние силы тяги на устойчивость движения колеса автомобиля.
Рассмотрим схему сил, действующих на ведущее колесо, т.к. оно обладает наименьшей по сравнению с ведомым, устойчивостью в поперечном направлении.
Схема сил и моментов, действующих на ведущее колесо.

Рис. 17.
При приложении к колесу крутящего момента  , силы веса и боковой силы Fб в пятне контакта с опорной поверхностью возникают реакции Xк и Rу.
, силы веса и боковой силы Fб в пятне контакта с опорной поверхностью возникают реакции Xк и Rу.
Равнодействующая реакций, действующих в плоскости дороги, определяется из выражения:
 , (26)
, (26)
где  - сила тяги колеса, возникающая при подходе к колесу крутящего момента;
- сила тяги колеса, возникающая при подходе к колесу крутящего момента;
Rу - боковая реакция опорной поверхности.
Из рис. 16 Rу = Fб. Чтобы не было скольжения колеса, сила сцепления его с дорогой  должна быть больше равнодействующей RS, т.е. должно выполняться условие:
должна быть больше равнодействующей RS, т.е. должно выполняться условие:
 (27)
(27)
где j - коэффициент сцепления,
 - вертикальная реакция опорной поверхности.
- вертикальная реакция опорной поверхности.
Из рис. 16 
Подставим в выражение (27) значение равнодействующей боковых реакций
 (28)
(28)
Из выражения (28) может быть определена максимально допустимая по условиям сцепления колеса с дорогой величина боковой силы Fб и равной ей боковой реакции опорной поверхности Rу.
 (29)
(29)
При увеличении подводимого к колесу крутящего момента сила тяги колеса также увеличивается. При этом потеря колесом боковой устойчивости может наступить при меньшей величине боковой силы Rу (29).
Чем больше сила сцепления колеса с дорогой и чем меньше сила тяги колеса , тем при большем значении боковой силы Fу колесо сохраняет устойчивость, т.е. не скользит в поперечном направлении. Из сказанного следует, что ведомое колесо всегда обладает большей устойчивостью против бокового скольжения, чем ведущее.
Изучив влияние силы тяги на устойчивость колеса, рассмотрим занос заднего и переднего мостов автомобиля.
Занос заднего моста
При движении автомобиля по дороге с недостаточным сцеплением колес с опорной поверхностью и действие боковой силы наиболее вероятным и наиболее опасным является занос заднего моста.
Посмотрим схему заноса заднего моста.
Схема заноса заднего моста
Предположим, что под действием боковой силы Fу начался занос задней оси. Это вызовет поворот автомобиля вокруг центра О, хотя передние колеса при этом находятся в нейтральном положении. Поперечная составляющая центробежной силы Fу, действует в том же направлении, что и боковая сила Fб, вызывает дальнейшее возрастание центробежной силы, в результате чего занос прогрессирует.
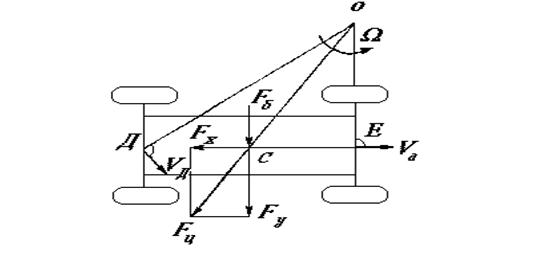
Рис. 18.
Для устранения заноса заднего моста автомобиля необходимо уменьшить силу тяги (уменьшить подачу топлива или прекратить торможение). Если этого недостаточно, то нужно повернуть управляемые колеса в сторону заноса.
Занос переднего моста
При заносе переднего моста поперечная составляющая центробежной силы Fу направлена в сторону, противоположную действующей боковой силе Fу, в результате чего боковое скольжение передних колес автоматически прекращается и автомобиль не теряет устойчивости.

Рис. 5
Чтобы избежать потери автомобилем устойчивости необходимо плавно уменьшать скорость до начала поворота, в особенности на влажной и скользящей дороге.
Значительное влияние на устойчивость движения автомобиля оказывают колебания управляемых колес.
Устойчивость автомобиля на поперечном уклоне (косогоре)
При прямолинейном движении автомобиля на поперечном уклоне (косогоре) нарушение его устойчивости выражается в прокидывании или боковом скольжении (сползании) под действием составляющей силы веса.
Рассмотрим схему сил, действующих на автомобиль, двигающийся прямолинейно по косогору.
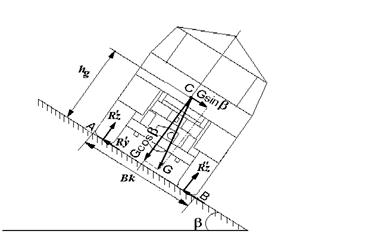 Схема сил, действующих на автомобиль, действующих прямолинейно по косогору
Схема сил, действующих на автомобиль, действующих прямолинейно по косогору
Рис. 20
Обозначим:- равно-действующая нормальных реакций опорной повер-хности, действующих соот-ветственно на колеса левого и правого сторон автомобиля;  - равнодействующая боковых реакций опорной поверхности, действующих соответственно на колеса левой и правой сторон автомобиля.
- равнодействующая боковых реакций опорной поверхности, действующих соответственно на колеса левой и правой сторон автомобиля.
Опрокидывание автомобиля наступает в тот момент, когда опорная реакция  . Опрокидывающей силой является составляющая силы автомобиля
. Опрокидывающей силой является составляющая силы автомобиля  .
.
Из условия равновесия автомобиля относительно т. В можно записать:
Разделим обе части неравенства на cos b. После преобразования получим условие, при котором происходит опрокидывание автомобиля на косогоре:
 (30)
(30)
Анализируя полученное выражение видим, что чем шире колея и ниже расположен центр масс автомобиля, тем при большем угле поперечного уклона происходит опрокидывание.
Обозначим:

где  - коэффициент поперечной устойчивости.
- коэффициент поперечной устойчивости.
После постановки в выражение (30) получим:  .
.
Коэффициент поперечной устойчивости является одним из показателей устойчивости автомобиля.
Наименьшее значение угла поворота поперечного уклона, при котором происходит опрокидывание автомобиля, при  называется критическим углом косогора по боковому опрокидыванию.
называется критическим углом косогора по боковому опрокидыванию.
 или
или 
Значения критических углов косогора по боковому опрокидыванию находится в пределах:
легковые автомобили 42…50
грузовые автомобили 29…40
автобусы 27…33
Приведенные значения критических углов косогора по боковому опрокидыванию автомобилей определены без учета поворота (крена) кузова относительно неподрессоренных масс и влияния других факторов снижающих устойчивость.
Поэтому действительные критические углы косогора по боковому опрокидыванию автомобилей имеют меньшие значения.
Руководящим нормативным документом центрального автополигона НАМИ установлено минимальное допустимое значение  для автотранспортных средств различной категории при испытании на специальной платформе с переменным поперечным уклоном – 210.
для автотранспортных средств различной категории при испытании на специальной платформе с переменным поперечным уклоном – 210.
Поскольку сползание автомобиля не всегда приводит к его опрокидыванию, то нужно стремиться конструировать автомобиль таким образом, чтобы потеря устойчивости началась с бокового скольжения (сползания).
Боковое скольжение (сползание) автомобиля на косогоре наступает при условии, если боковая составляющая силы веса автомобиля будет больше или равна сумме боковых реакций опорной поверхности, действующих на все колеса автомобиля  , т.е.
, т.е.

где - равнодействующая боковых реакций опорной поверхности, действующих на все колеса автомобиля.

При отсутствии силы тяги равнодействующая боковых реакций имеет наибольшее значение и определяется из выражения:

В этом случае условие бокового скольжения (сползания) автомобиля запишется в виде:

Проведя преобразования получим:
 (32)
(32)
Наименьшее значение угла поперечного уклона, при котором начинается боковое скольжение (сползание) автомобиля при , называется критическим углом косогора по боковому скольжению.
 (33)
(33)
Для того, чтобы боковое скольжение (сползание) автомобиля началось раньше, чем опрокидывание необходимо чтобы выполнялось условие:

Произведя подставки получим:
 или
или
Анализируя полученные выражения, следует подчеркнуть, что сползание автомобиля на косогоре, во многих случаях заканчивается его опрокидыванием. Поэтому движение автомобиля на косогоре должно совершаться на малых скоростях и только по необходимости. При этом нужно избегать поворотов автомобиля для движения в сторону вершин.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 6945; Нарушение авторских прав?; Мы поможем в написании вашей работы!