КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Технічна характеристика верстата. Загальна характеристика верстата
|
|
|
|
Загальна характеристика верстата
ВЕРСТАТ МОДЕЛІ 723IA
ДВОСТОЯКОВИЙ ПОВЗДОВЖНЬО-СТРУГАЛЬНИЙ
Y11 групи.
Лекція 16. Кінематичні структури, схеми та настроювання верстатів
Завдання на самостійну роботу
- по літературі [ 1,2 9,10, 14, 25 ] уважно розібрати принцип роботи, область використовування, характерні рухи та операції, види оброблюваних поверхонь, інструментальне забезпечення верстатів V групи (різефрезерувальних та різе-зубошліфувальних верстатів)
Область використовування, характерні рухи та операції, види оброблюваних
поверхонь, інструментальне забезпечення верстатів Y11 групи. Кінематичні структури,
схеми та настроювання стругальних, довбальних та протягувальних верстатів
[1-3, 7, 10 ].
Завдання на самостійну роботу.
Призначення верстата. Верстат призначений для обробки горизонтальних, вертикальних і нахилих площин, а також лінійчатих поверхонь у. крупних деталей великої довжини. На верстаті можуть бути одночасно оброблені деталі середніх розмірів, що встановлюються рядами на столі.
Розміри робочої поверхні столу, мм.......................................900X3000
Відстань між стійками, мм.........................................................1100
Довжина ходу столу,мм: найменша.............................................. 300
найбільша.................................................3100
Найбільша маса оброблюваного виробу, кг.............................. 5000
Відстань між вісями вертикальних супортів, мм:
найменша..........................................................................290
найбільша...........................................................................1710
Найбільші переміщення вертикальних супортів, мм:
вертикальне...........................................................................250
горизонтальне.....................................................................1420
Найбільші переміщення бічного супорта, мм:
вертикальне..........................................................................850
горизонтальне...........................................................................250
Найбільший кут повороту супортів, град.......................................±60
Межі швидкості ходу столу, м/хв.........................................5—75
Потужність головного електродвигуна, КВт.................................16,2
Межі величин подач вертикальних супортів, мм/дв.хід:
горизонтальних..............................................................0,5—25
вертикальних...........................................................0,125—6,25
Межі величин вертикальних подач бічного
супорта,мм/дв. хід..........................................................0,25—12,5
Швидкість швидких переміщень, мм/мін:
вертикальних супортів у горизонтальному напрямку............2360
вертикальних супортів у вертикальному напрямку...................590
бічного супорта у вертикальному напрямку...........................1180
Потужність електродвигунів подач, КВт.....................................1,7
Найбільше переміщення траверси, мм...........................................870
Швидкість переміщення траверси, мм/мін....................................500
Потужність електродвигуна траверси, КВт:
приводу переміщення............................................................1,7
приводу затиску..........................................................................1,7
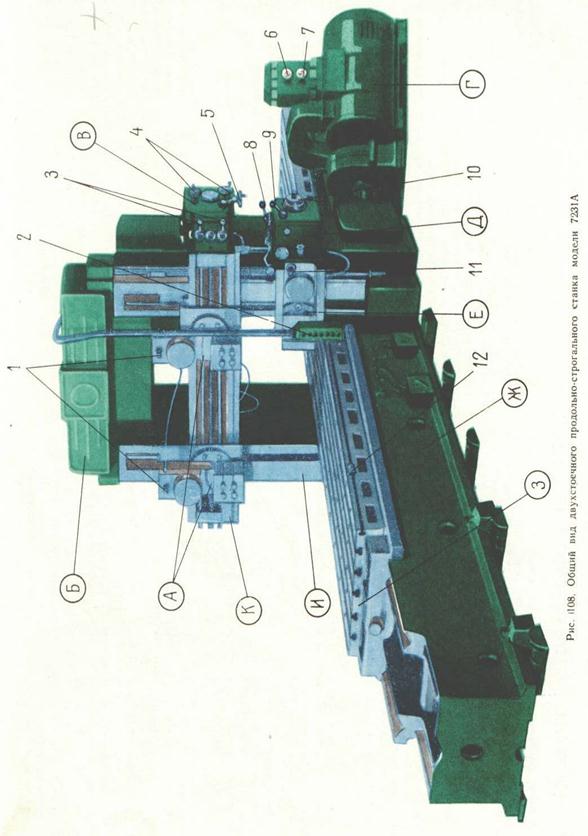
Основні вузлу верстата (мал.111). А — верхні супорти; Б — портал; В — коробка подач верхніх супортів; Г — електричний привод руху різання; Д — коробка подач бічного супорта; Е — бічний супорт; Ж — станина; 3 — стіл; И — бічні стійки; К — траверса.
Органи управління. / — квадрати для ручного вертикального переміщення верхніх супортів; 2 — підвісна кнопкова станція; 3 — рукоятки для зміни напрямку подачі верхніх супортів; 4 — квадрати для ручного горизонтального переміщення верхніх супортів; 5 — рукоятка включення подач і швидких переміщень верхніх супортів; 6 — маховичок для установки швидкості робочого ходу столу; 7 — маховичок для установки швидкості холостого ходу столу; 8 — рукоятка для зміни напрямку вертикальної подачі бічного супорта; 9 — рукоятка для включення подачі і швидкого переміщення бічного супорта; 10 — квадрат для ручного вертикального переміщення бічного супорта; //— квадрат для ручного горизонтального переміщення бічного супорта;
12 — упори для установки довжини і місця ходу столу.
Рухи у верстаті. Рух різання — прямолінійний зворотньо-поступальний рух столу сумісно з оброблюваною деталлю. Рухи подач — переривисті поступальні переміщення верхніх супортів в поперечному, вертикальному і нахилому напрямках і бічного супорта у вертикальному напрямку. Допоміжні рухи: механізовані швидкі і ручні переміщення супортів у вказаних напрямках; ручне горизонтальне переміщення бічного супорта; підйом і опускання траверси; затиск траверси на стійках і підйом різцевих голівок при зворотньому ході столу.
Принцип роботи. Оброблювана деталь або ряд одночасно оброблюваних деталей закріплюються на столі верстата. Одиночні різці або комплекти одночасно працюючих різців встановлюються на верхніх і бічному супортах (мал. 112). Столу спільно з оброблюваною деталлю надається прямолінійний зворотньо-поступальний рух, причому при ході столу вперед відбувається зняття стружки з оброблюваної деталі (робочий хід); при ході столу назад з підвищеною швидкістю (холостий хід) зняття стружки
|
Мал. 111. Загальний вигляд повздовжньо-стругального верстату
моделі 7231А
не проводиться і різці в цей час автоматично відводяться від обробленої поверхні, повертаючись на вісі відкідної дошці. Подача супортів має переривистий характер і здійснюється за кожен подвійний хід столу.

Мал. 112. Встановлення різців у супорти повздовжньо-стругальних верстатів
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 620; Нарушение авторских прав?; Мы поможем в написании вашей работы!