КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Применение нейронных сетей (НС) для управления
|
|
|
|
Моделирование (идентификация) нелинейных динамических процессов (объектов)
Лекция 27
Способность нейронных сетей осуществлять нелинейное преобразование сигналов может быть использовано для моделирования нелинейных динамических объектов. В этом случае модель находится путем обучения нейронной сети, т.е. путем настройки весов так, чтобы минимизировать ошибку моделирования.
Использование нейронных сетей для моделирования поясним на примере дискретного динамического нелинейного объекта с одним входом и одним выходом. Предположим, что на вход такого объекта поступает управляющая последовательность u[iT], а на выходе с помощью датчика измеряется управляемая последовательность y[iT ]. Пусть известно, что дискретная модель объекта является моделью второго порядка. Заметим, что выбор порядка модели относится к проблемам идентификации нелинейных систем, но не является предметом данного курса лекций. Тогда общее описание нейронной динамической модели с тремя входными и одним выходным сигналом можно выразить в форме
 . (30)
. (30)
В этом уравнении  обозначает реакцию нелинейного объекта в момент t=(i
обозначает реакцию нелинейного объекта в момент t=(i  1)T, а
1)T, а  - реакцию нейронной динамической модели этого объекта в тот же момент времени t=(i + 1)T на один и тот же сигнал u[iT]. Для сравнения линейный аналог этой нейронной модели описывается как
- реакцию нейронной динамической модели этого объекта в тот же момент времени t=(i + 1)T на один и тот же сигнал u[iT]. Для сравнения линейный аналог этой нейронной модели описывается как
 (31)
(31)
с параметрами a1, a2, b1, подлежащими оценке, и называется авторегрессионной моделью (ARX-моделью). Разностный сигнал
e[(i+1)T]=  -
-
управляет процессом настройки весов нейронной модели.
Проблема идентификации объекта сводится к построению такой его параметрической нейронной модели, чтобы реакции объекта y[i ] и модели  на один и тот же управляющий сигнал u[i] совпадали в пределах допустимой ошибки
на один и тот же управляющий сигнал u[i] совпадали в пределах допустимой ошибки  , т.е.
, т.е.
|  -|
-|  .
.
В случае применения для моделирования объектов нейронная сеть обычно подключается параллельно объекту и использует для предсказания выхода объекта смещенные в сторону запаздывания выходные последовательности объекта так, как это показано на рис. 9.
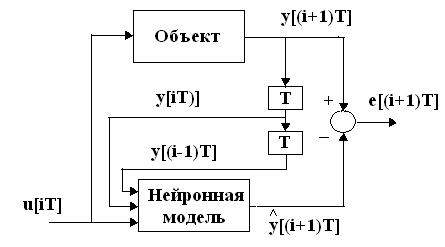
Рис. 9
При таком подключении реакция сети зависит от входа u[(iT)], а также от сигналов u1[iT] =y[iT] и u2 [iT]= y[(i-1)T], представляющих собой две прошедшие через линии задержки T реакции желаемого сигнала, составляющих ожидаемый выходной вектор сети. В этой ситуации нейронная сеть выполняет функции классической многослойной статической сети.
Найденная нейронная модель тестируется с помощью свободного запуска («free run») (рис. 11).
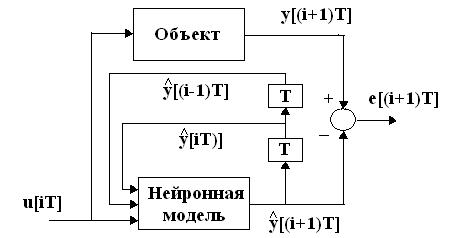
Рис. 11
Термин свободный запуск используется, чтобы подчеркнуть контраст с так называемым предсказанием на один период дискретизации («one-step- ahead prediction») (рис.10). При свободном запуске оценки выходов объекта  и
и  используются как входы нейронной сети вместо измеренных значений. Таким путем модель может быть использована, чтобы моделировать объект независимо от измеренных значений выхода. Если модель используется для предсказания на несколько периодов дискретизации (на некоторый горизонт), как это необходимо при управлении с предсказанием, свободный запуск представляет собой более дискриминационный тест и более удобен для тестирования модели, чем модель тестирования, опирающаяся на предсказание на один период дискретизации.
используются как входы нейронной сети вместо измеренных значений. Таким путем модель может быть использована, чтобы моделировать объект независимо от измеренных значений выхода. Если модель используется для предсказания на несколько периодов дискретизации (на некоторый горизонт), как это необходимо при управлении с предсказанием, свободный запуск представляет собой более дискриминационный тест и более удобен для тестирования модели, чем модель тестирования, опирающаяся на предсказание на один период дискретизации.
В общем случае для объектов высокого порядка в качестве входов нейронной модели используют, кроме настоящих значений входа u[iT] и выхода y[iT ], p прошлых значений входа u[(i-1)T], u[(i-2)T],…, u[(i-p)T], и q прошлых значений выхода y[(i-1)T], y[(i-2)T],…, y[(i-q)T], так что общее описание нейронной динамической модели можно представить в виде

Для примера рассмотрим моделирование нелинейного динамического объекта Винера, состоящего из последовательно включенных линейного фильтра Баттерворта шестого порядка и нелинейного статического элемента в форме полиномиальной функции x 3 . В нейронной модели этого объекта использовалась сеть с одним скрытым слоем из 25 нейронов. Входной слой состоял из 24 узлов, а входной вектор включал кроме настоящих значений входа и выхода, 11 прошлых значений входа и 11прошлых значений выхода. После подбора значений весов с помощью обучения тестировалась способность сети к обобщению, для чего на ее вход подавался синусоидальный сигнал. На рис. 10 показаны графики изменения сигнала, полученного на выходе нелинейного объекта (пунктирная линия), и сигнала, имеющего место на выходе нейронной сети (непрерывная линия).
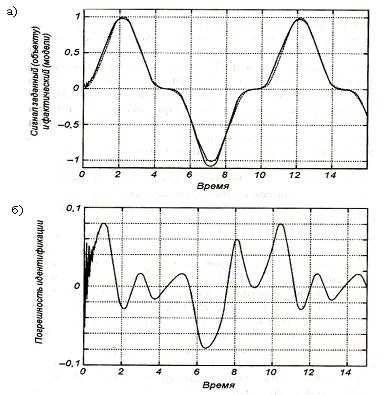
Рис. 10
Нейронные сети применяются весьма успешно для идентификации (как показано выше) и управления динамическими объектами. Возможность использования многослойных персептронов как универсальных аппроксиматоров делает их популярными для моделирования нелинейных объектов и создания универсальных (общего назначения) нелинейных регуляторов. Рассмотрим некоторые широко используемые методы применения НС-систем в качестве регуляторов.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 482; Нарушение авторских прав?; Мы поможем в написании вашей работы!