КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Требования потребителей к спутниковым радионавигационным системам
|
|
|
|
Обобщенная структурная схема аппаратуры потребителей СРНС
Обработка информации в аппаратуре потребителей СРНС
Обобщенная структурная схема аппаратуры потребителей СРНС.
Лекция 12
Основные функции аппаратуры потребителей заключаются в выполнении следующих операций:
выбор четырех, необходимых для работы квазидальномерной системы НИСЗ из числа наблюдаемых потребителем;
расчет ожидаемых значений навигационных данных для выбранных НИСЗ;
поиск сигналов выбранных спутников;
выделение эфемеридной информации;
измерение временной задержки и доплеровских частот сигналов;
обработка результатов измерений и данных об эфемеридах для определения координат и скорости потребителя;
оценка точности полученного навигационного решения.
Выбор спутников. Созвездие из четырех рабочих спутников выбирается по критерию минимума геометрического фактора на основании хранящегося в памяти аппаратуры альманаха и грубых данных о местоположении от системы счисления пути или другой навигационной системы.
Поиск сигналов. После выбора спутников в аппаратуре потребителя вырабатываются опорные коды, аналогичные по структуре дальномерным кодам тех НИСЗ, прием сигналов которых ожидается потребителем. Поиск этих сигналов основан на нахождении максимума КФ принятого и опорного кодов. При грубом дальномерном коде Голда процедура поиска требует просмотра 1023 вариантов сдвига кода (на t к) и порядка 10 вариантов несущих частот (при F Д max = 10 кГц и полосе пропускания доплеровского фильтра 1 кГц). Для уменьшения затрат времени на поиск используются приближенные значения задержки кода и F Д, полученные по грубым данным о местоположении. Поиск осложняется малым уровнем сигнала, составляющим в лучшем случае – 160 дБ×Вт.
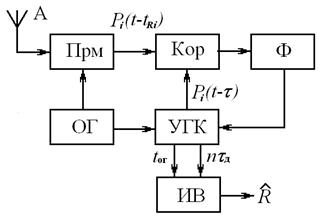
Измерение дальности. Информация о дальности до НИСЗ извлекается из задержки принимаемого кода, например кода Pi(t - tRi), относительно опорного кода. При слежении за i -м спутником управляемый генератор кода (УГК) (рис. 1 а) в момент t 0, соответствующий моменту излучения сигнала НИСЗ, формирует код Pi (t -t), тактовая частота которого задается опорным генератором (ОГ). Этот код подается на коррелятор (Кор), куда с приемника (Прм) поступает также принятый сигнал НИСЗ. Сигнал ошибки с выхода коррелятора пропорционален сдвигу tRi - t подаваемых на Кор кодов и после усреднения в фильтре (Ф) используется для изменения временного положения формируемого в УГК кода. Процесс продолжается до совпадения кодов по времени (t=tRi), после чего измеритель времени (ИВ) определяет сдвиг опорного кода t, используя для этого число п с элементов кода, на которое потребовалось сдвинуть опорный код.
а)
 |
б
 |
в
в)
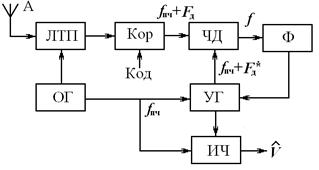
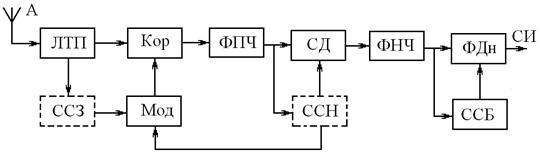
Рис. 1 Структурные схемы измерителей дальности (а) и скорости (б) аппаратуры потребителя СРНС, а также устройства выделения служебной информации (в)
Измерение скорости. Информация о скорости, содержащаяся в доплеровском сдвиге частоты F Д, извлекается с помощью системы ФАПЧ или АПЧ (рис. 1, б). После замыкания цепи слежения за кодом принятый сигнал с линейного тракта приемника (ЛТП) демодулируется при умножении на соответствующий данному НИСЗ код и поступает на дискриминатор (ЧД) следящей системы. Опорный сигнал с частотой f п.ч + F *Д формируется управляемым генератором (УГ). Сигнал ошибки фильтруется и управляет частотой УГ. В установившемся режиме частота F* Д = F Д, и ее значение с выхода измерителя частоты (ИЧ) используется как мера скорости.
Выделение служебной информации. После установления слежения за кодом и несущей частотой принимаемый сигнал с ЛТП (рис. 1, в) поступает на коррелятор (Кор). На втором входе Кор действует модулированный по фазе дальномерным кодом сигнал с модулятора, несущая частота которого формируется схемой слежения несущей (ССН), входящей в состав измерителя скорости, а модулирующий код берется со схемы слежения за задержкой (ССЗ), входящей в измеритель дальности. Этот код управляет фазовым модулятором (Мод). В корреляторе дальномерный код демодулируется. Полосовой фильтр (ФПЧ) на промежуточной частоте устраняет высокочастотные составляющие. Синхронный детектор (СД) выделяет видеосигнал служебной информации, который после очищения от шумов фильтром низких частот (ФНЧ) подается на схему синхронизации по битам (ССБ) и фильтр данных (ФДн), формирующий значения битов служебной информации (СИ).
3.2.2. Структурная схема аппаратуры потребителей
Для выполнения указанных операций применяют как одноканальные, так и многоканальные приемники-процессоры (ПП). Первые используются на объектах с низкими динамическими характеристиками и вычисляют необходимые данные путем последовательного переключения со спутника на спутник. Вторые устанавливают на маневренных объектах. В ряде конструкций ПП вместо физического повторения каждого канала применяют временное уплотнение (мультиплексирование), при котором выборки сигналов четырех НИСЗ поочередно обрабатываются одним каналом. Выборки берутся, например, каждые 20 мс по 5 мс на каждый спутник (и по 2,5 мс на каждую из частот f 1 и f 2).
Возможная структурная схема ПП приведена на рис. 2.
В линейном тракте приемника (ЛТП) сигналы всех НИСЗ усиливаются и преобразуются на промежуточную частоту. Синтезатор частот (СЧ) формирует требуемые для работы аппаратуры частоты и интервалы времени. Опорный термостатированный генератор (ОГ) с кварцевой стабилизацией настроен на частоту f 1, близкую к основной частоте f 0 спутников (в аппаратуре системы «Navstar», например, f 0= 10,2304 МГц). Демодулятор кода (ДК) объединяет дискриминаторы цепей слежения за кодом и несущей частотой сигнала и содержит два квадратурных канала. Сигнал ошибки с ДК поступает на устройство цифровой предварительной обработки (ЦПО), где подвергается аналого-цифровому преобразованию и фильтрации.
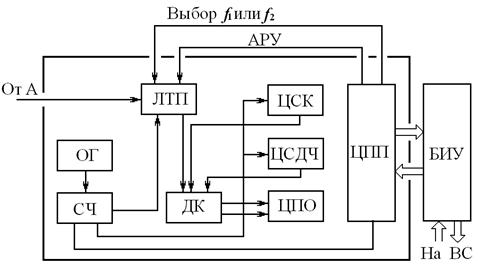
Рис. 2. Структурная схема приемника-процессора аппаратуры потребителя СРНС
Навигационные данные выделяются из сигнала цифровым процессором приемника (ЦПП). Через него замыкаются цепи обратных связей как измерительных устройств, так и устройств регулировки параметров приемника. Блок ЦПП реализует оптимальные алгоритмы оценки навигационных данных (обычно алгоритм калмановской фильтрации) и содержит от одного до четырех микропроцессоров, дополненных модулями памяти.
Цифровой синтезатор кода (ЦСК) предназначен для получения и сдвига по времени кода, соответствующего спутнику, за которым ведется слежение, для поиска сигнала и измерения дальности. Управляющий сигнал поступает от ЦПП через определенные интервалы времени, задаваемые СЧ. Цифровой синтезатор доплеровских частот ЦСДЧ вырабатывает дискретные значения частот, используя для этого сигнал от СЧ. Для получения F Д может быть применен накапливающий сумматор, разрядность которого определяет требуемый дискрет изменения F Д. Состояние старших разрядов сумматора, представляющее собой код доплеровской частоты, преобразуется в аналоговую форму, смешивается с опорной частотой (например, 2 f 1) и используется в системе слежения за частотой сигнала.
Информация с ПП выдается на блок индикации и управления (БИУ), а через него к внешним системам (ВС). Этот же блок служит для ввода данных и управления аппаратурой.
Особенности построения СРНС США «Навстар». Иначе, Globale Portioning System/Navigation Satelite Time and Ranging, сокращенно GPS/Navstar. Строится на указанных выше принципах [6]. В варианте системы 1996 г. предусматривается использование 24 среднеорбитальных спутников (рис. 3.), размещенных на шести круговых орбитах высотой 20200 км с наклонением 55° и периодом обращения 12 ч.
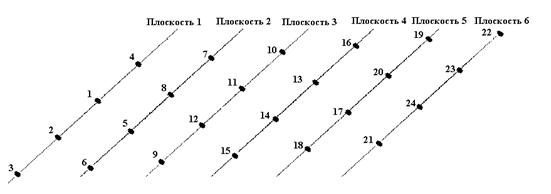
Рис.3.. Группировка системы «Навстар»
Каждый спутник излучает широкополосные сигналы дециметрового диапазона на частотах f 1 и f 2 с относительной нестабильностью частоты за сутки менее 10-13. На частоте f 1 в квадратуре (со сдвигом фаз 90°) излучаются два независимых сигнала с фазовой манипуляцией. Первый – кодирован свободно используемым С/А (Clear Acquisition) кодом с тактовой частотой f 0 / 10, периодом повторения около 1 мс, доступным как военным, так и гражданским пользователям.
Второй – кодирован защищенным Р (Protected) кодом с тактовой частотой f 0, периодом обновления, равным неделе, и доступен только военным пользователям. На частоте f 2 излучается сигнал с Р-кодом, предназначенный для компенсации ионосферных погрешностей в случае военных применений. Аппаратура военных и гражданских пользователей получает эфемеридную информацию и поправки временной шкалы путем амплитудной модуляции навигационных сигналов. Состояние спутниковой аппаратуры выдачи этой информации контролируется несколько раз в сутки. По результатам экспериментальной проверки ошибки измерения координат составляют менее 10 м при Р-коде и порядка 30...100 м при С/А-коде.
В период эксплуатации по Интернету объявляются:
а) ошибки: 16 м; 0,1 м/с и 0,1 мкс при Р-коде и 100 м при С/А-коде;
б) предупреждение о дальнейшем загрублении режима С/А «в период национальной опасности».
СРНС США «Дифференциальный Навстар». Модификация «Навстар». Рассчитана на повышение качества информации, выдаваемой гражданским пользователям, не допущенным к использованию Р-кода. Это обеспечивается созданием цепи топографически привязанных контрольных приемных станций.
Особенности построения СРНС России «Глонасс». ГЛОбальная НАвигационная Спутниковая Система в составе до 24 среднеорбитальных спутников, размещенных на трех круговых орбитах. Пример их группировки показан на рис.4. Система работает в диапазонах частот 1597...1617 МГц и 1240...1260 МГц в условиях фазовой манипуляции сигналов и разноса частот излучений спутников.
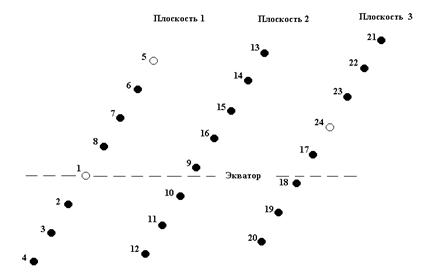 |
Рис.4. Группировка «Глонасс»
Как и в СРНС «Навстар», предусмотрены режимы повышенной и стандартной точности. Последний режим доступен всем гражданским пользователям и одобрен в 1996 г. международной организацией гражданской авиации (ICAO) при ошибках измерения (с вероятностью 0,997): координат в горизонтальной плоскости до 57...70 м; вертикальной координаты до 75 м; отсчетов времени до 1 мкс.
До последнего времени создание спутниковых радионавигационных систем осуществ-ось в соответствии с требованиями, определяемыми их первоначальным целевым назна-ием.
Общими при этом были качественные требования глобальности, независимости от рометеорологических условий, подстилающей поверхности, рельефа, окружающей расти-ьности, застройки, времени суток и года, непрерывности, неограниченной пропускной собности, практической независимости от высоты над поверхностью земли и других ус-ий движения определяющегося объекта, помехозащищенности и др.
Изучение потребностей гражданских пользователей также указывает на необходи-ть иметь эти свойства. Однако использование СРНС в интересах местоопределения и на-эдии гражданских объектов (самолетов и вертолетов, морских и речных судов, автомоби-, топопривязчиков и др.) выдвигает и новые, в ряде случаев более высокие, количествен-требования, вытекающие из необходимости обеспечения безопасности и экономичности нкения, а также решения специальных задач (наблюдение, аэрофотосъемка, поиск полез-ископаемых, поиск и спасение терпящих бедствие транспортных средств и людей).
Такими являются требования к точностным характеристикам, например, к среднеквад-гческим ошибкам (СКО) определения навигационных параметров, и к показателям на-ности навигационного обеспечения.
Под последними понимаются требования:
> доступности (готовности), мерой которой является вероятность работоспособности РНС перед и в процессе выполнения той или иной задачи;
» целостности, мерой которой является вероятность выявления отказа в течение времени, равного или менее заданного.
непрерывности обслуживания, мерой которой служит вероятность работоспособности системы в течение наиболее ответственных отрезков времени движения (выполнения задачи).
Требования к навигационному обеспечению различных гражданских объектов, осуще-яемому, в частности, с помощью СРНС, впервые в нашей стране сформулированы, 'Щены и приведены в Российском радионавигационном плане (РРНП) [1, 2], подготовим с участием широкого круга специалистов различных заинтересованных ведомств и сб. Они учитывают также положения документов таких международных организаций, ЯКАО (Международная организация гражданской авиации), ИМО (Международная мор-
например, США.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 1325; Нарушение авторских прав?; Мы поможем в написании вашей работы!