КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
ЛЕКЦИЯ 7. Антропометрия- методика измерения весовых, линейных, угловых параметров тела человека
|
|
|
|
Антропометрия - методика измерения весовых, линейных, угловых параметров тела человека. Применяется также для анализа характера патологических искривлений позвоночника и нарушений осанки. В этом случае измеряют пространственные координаты контрольных точек на теле человека.
С помощью этой методики можно диагностировать такие заболевания, как кифоз, сколиоз.
Известно две метода измерений, которые нашли реализацию в виде завершенных аппаратно-программных комплексов.
Первый метод измерения координат точек с использованием электромеханического устройства – антропометра, который состоит из: измерительной руки - 1, блока соединения с компьютером – 2, устройства удержания равновесия пациентом – 3 с упором в грудь – 4, компютера - 6 с программым обеспечением и устройства для калибровки - 7.
Рисунок 7.1 – Устройство антропометра.
Для измерения пространственных координат в антропометрическом комплексе используется механический сканер пространственных координат, похожий на измерительную руку.
Рисунок 7.2 – Сканер пространственных координат
Измерительная рука содержит звенья, соединенные тремя шарнирами. Кинематическая цепь заканчивается измерительным щупом. Положение щупа в пространстве определяется с помощью векторной модели.
Рисунок 7.3 - Цифровой оптический датчик углового положения ЛИР-119А 5000-05-ПС.
Для измерения угла вращения в шарнирах измерительной руки используется цифровой оптический датчик углового положения ЛИР-119А 5000-05-ПС.
Вращение датчика в положительном направлении – вращение от оси X к оси Y системы координат, т.е. против часовой стрелки. Направление вала датчика при этом совпадает с положительным направлением оси Z системы координат.
| 
|
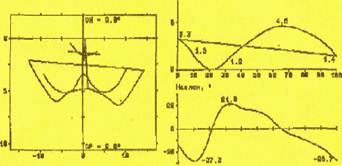
Рисунок 7.4 – График сигналов на выходе энкодера – а и выводы энкодера.
Через шлейф датчик питается напряжением 5В и выдает на выход счетные сигналы A, B и импульс сброса R. Кроме того, по шлейфу передаются инверсные сигналы –A, –B и –R.
При вращении вала датчика по часовой стрелке (в отрицательном направлении) сигналы на выходах A, B и R имеют форму, показанную на рисунке. Сигнал A опережает по фазе сигнал B на половину периода. Передний фронт сигнала R совпадает с передним фронтом сигнала B, а задний – с задним фронтом сигнала A. Направление вращения датчика и величина поворота определяется цифровой комбинацией текущего и предыдущего состояния на выходах энкоднра.
Программа контроллера постоянно анализирует состояние сигналов A, B и R и в зависимости от их изменения корректирует значения внутренних счетчиков угла. Применяемые в схеме датчики имеют 5000 периодов импульсов на один оборот.
Второй метод, это метод стереосъемки, который позволяет регистрировать топологию поверхности спины, рис. 7.5.

| 
| |
Рисунок 7.5 - Результат диагностики позвоночника с помощью компьютерного оптического топографа
Оптическая система оценки геометрических параметров нижних конечностей предназначена для измерений линейных и угловых параметров, которые характеризуют взаимное расположение сегментов каждой конечности и расположение их отдельных элементов в привязке к проекциям результирующих векторов реакции опоры, измеренных с помощью базометра.
Методический подход характеризует рисунок 7.6. Измерениям подвергаются, прежде всего углы между сегментами тела человека (между голенью и бедром). При этом, можно сделать выводы о том на сколько уменьшаются патологические изменения конечности (в данном случае угол в колене во фронтальной плоскости) в ходе реабилитации или при использовании ортопедических изделий.
Рисунок 7.6 – Схема измерений геометрических параметров нижних конечностей.
Оптическая система включает оптический анализатор, который позволяет получать оптическое изображение пациента в разных ракурсах, и базометр, который используется для измерения величины и координат базового вектора реакции опоры каждой конечности в отдельности и результирующего вектора реакции опоры.
Получение оптического изображения пациента обеспечивается цифровой фотокамерой Panasonic DMC-FZ30, подключаемой к компьютеру. Изображение пациента регистрируется в момент записи базометрии для синхронизации положения тела в пространстве и характеристик опоры. Далее изображение передается в компьютер для обработки.
Компьютерная программа включает в себя модуль калибровки, вычислительный модуль преобразования координат и модуль отображения полученной информации в виде, удобном для анализа результатов измерений.
Технические характеристики оптический анализатора:
· расстояние от центра базометра до камеры,м............. 2,1-2,6
· диапазон измерений по высоте, м, не менее........................... 2
· диапазон измерений по ширине, м, не менее....................... 1,5
· погрешность измерения расстояния между точками в зоне
измерений, мм, не более…………............................................. ±3
· погрешность измерения угловых значений, град., не более ±2
Функциональная схема оптической системы оценки геометрических параметров нижних конечностей приведена на рисунке 7.7.

Рисунок 7.7 – Функциональная схема оптической системы оценки геометричних параметров нижних конечностей.
Базометр (1) подключается к персональному компьютеру или ноутбуку (3), используя последовательный интерфейс RS-232. Цифровая фотокамера (2) устанавливается на штативе на расстоянии 210-260 см относительно центра базометрической платформы. Высота установки фотокамеры выбирается таким образом, чтобы базометрическая платформа находилась в нижней части кадра близко к его нижнему краю. Позиции установления камеры обозначены буквами A, B, C и D.
При использовании нескольких камер фотографирования должно осуществляться синхронно каждой из них. Если используется одна камера, тогда она последовательно устанавливается в нужны для обследования позиции и проводится фотографирование одновременно с записью базометрической информации.
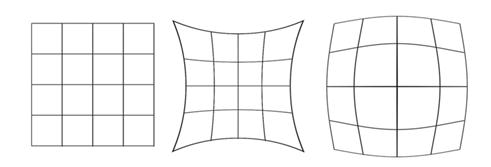
Любая оптическая система имеет аберации. Аберрация представляет собой ошибки или погрешности изображения в оптической системе, которые появляются при отклонении луча от того направления, по которому он должен был бы идти в идеальной оптической системе. Наиболее значительной аберрацией в широкоугольном объективе фотокамеры является дисторсия. Дисторсия искривляет прямолинейные участки фотографируемого объекта тем более, чем ближе к краю изображения находится фотографируемый элемент.
а б в
Рисунок 7.8 – Пример нормального изображения – а и дисторсии – б и в.
Для уменьшения влияния дисторсии и других погрешностей связанных с оптическими преобразованиями осуществляется калибровка оптического анализатора.
Калибровка проводится путем фотографирования тест-объекта, который представляет собой набор фиксированных калибровочных точек в пространстве с известными координатами.
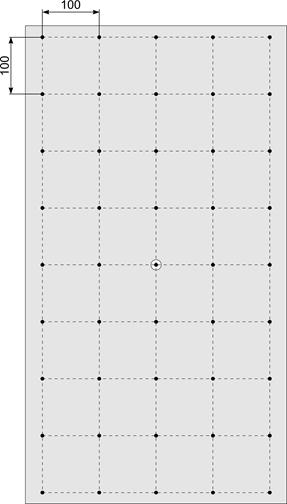
Рисунок 7.9 – Тест-объект.
В процессе калибровки фотокамера устанавливается на штативе напротив центральной точки калибровочной плоскости. Оптическая ось объектива должна быть перпендикулярной калибровочной плоскости. Схема процесса калибровки показана на рисунке 7.10.
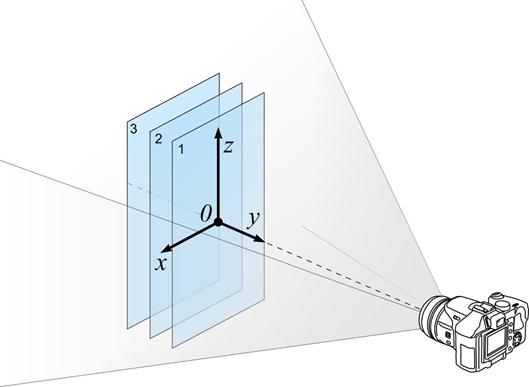
Рисунок 7.10 – Схема калибровки.
В ходе калибрования проводятся снимки для разных положений калибровочной плоскости – 1, 2 и 3, рис. 7.11. От положения к положению плоскость смещается параллельным переносом. После регистрации координат точек на тестовом объекте производят вычисления с помощью математической модели и определяют все неизвестные параметры, чтобы скомпенсировать погрешности измерений.
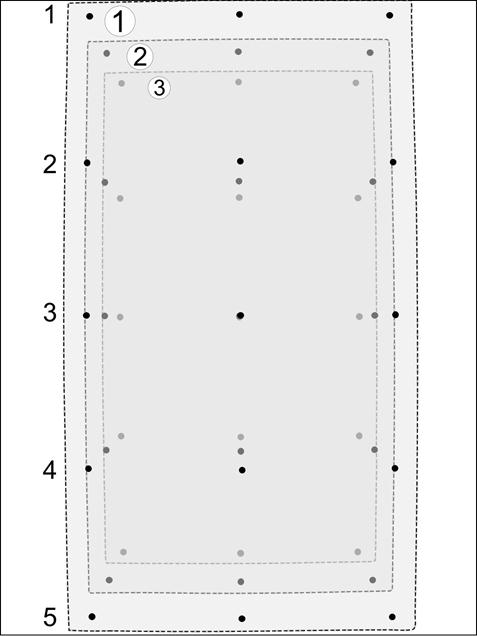
Рисунок 7.11 – Реальные изображения тестового объекта при калибровке.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 933; Нарушение авторских прав?; Мы поможем в написании вашей работы!