КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Определение углового положения ЛА
|
|
|
|
Так как точность выполнения заданной траектории полёта зависит от точности ориентации осей системы координат, связанной с ЛА относительно земной системы координат, то важной задачей внешнебаллистических исследований является определение углового положения объекта. Эти измерения осуществляются следующими способами:
- с использованием свободного гироскопа,
- с использованием оптико-электронных приборов,
- с помощью инерциальных датчиков.
При использовании гироскопических датчиков угловое положение ЛА регистрируется по положению внешней рамки гироскопа. При полёте ЛА под действием управляющих команд и внешних возмущений связная система координат OX1Y1Z1, центр которой находится в центре тяжести объекта, изменяет своё положение относительно стартовой системы OX0Y0Z0.
Взаимная их ориентация определяется тремя параметрами: углом рыскания Ψ, углом тангажа J и крена γ (Рис. 9.15).
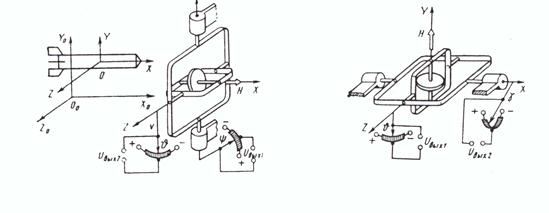
Рис. 9.15. Определение углового положения ЛА с помощью
гироскопических датчиков
Гироскопический датчик в зависимости от ориентации вектора кинетического момента Н и внешних рамок может измерять какие-либо два угла из трёх. Поэтому, используя показания двух гироскопических датчиков, можно определить значения углов Ψ, J, γ.
Из-за наличия геометрических ошибок и наличия критических углов (70-750), при которых нормальное функционирование гироскопа вследствие совмещения рамок прекращается, измеренные углы не совпадают с действительными. Поэтому для определения действительных углов используются формулы пересчёта, вид которых определяется ориентацией гироскопа.
При измерении углов ориентации оптико-электронным способом на борту ЛА устанавливается космический секстант, позволяющий определять угловые расстояния между небесными и земными ориентирами, угловые диаметры планет и т.п. Значения полученных углов пересчитываются в некоторую систему координат, связанную с гиростабилизированной платформой ЛА. Далее визир перенацеливается вручную или автоматически на другой ориентир и производится отсчёт в той же системе координат. Сравнение этих отсчётов позволяет определить углы ориентации ЛА.
Кроме космического секстанта могут использоваться оптико-электронные пеленгаторы и системы оптических датчиков, установленных на внешней оболочке корпуса ЛА.
Точность измерения углов данным методом весьма высока и во многом зависит от прогибов и вибраций основания, на котором установлены датчики. Поэтому их устанавливают на одном жёстком основании в непосредственной близости друг от друга. Высокая точность оптических методов позволяет использовать их для коррекции показаний свободных гироскопов.
Инерциальные датчики являются автономными измерителями углов ориентации ЛА и не требуют наличия каких-либо неподвижных точек. Принцип их действия основан на свойстве грузика сохранять некоторое время своё положение в пространстве при малом изменении углов ориентации ЛА. Инерциальный датчик может измерять одну составляющую угла, если известны две другие, например, по результатам оптических измерений.
Примером инерциального датчика может служить трёхкомпонентный феррозондовый датчик, применяемый на измерительной системе “Вектор-1”, позволяющей определять пространственную ориентацию боеприпаса на траектории (Рис. 9.16).
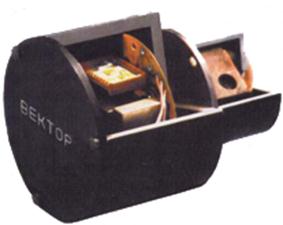
Рис. 9.16. Феррозондовая измерительная система “Вектор-1”
Основные технические характеристики данной системы имеют следующие значения:
- диапазон измеряемых углов -360 град,
- погрешность измерения -1,5 град,
- потребляемая мощность -0,27 Вт,
- масса -0,26 кг,
- ударная устойчивость -30000g.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 725; Нарушение авторских прав?; Мы поможем в написании вашей работы!