КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Сертификация устойчивости экскаватора
|
|
|
|
В настоящее время в нормативной документации на изделия строительного, дорожного и коммунального машиностроения положения требований к качеству и методы контроля соответствия стандарту на техническое средство соблюдены не для всех машин, а в некоторых случаях существующие рекомендации на сертификационные испытания не соответствуют современному уровню знания контролируемых процессов. Так, например, в ГОСТ 30067-93 "Экскаваторы одноковшовые универсальные полноповоротные" указывается только требование сохранения устойчивости экскаватора при работе на строительной площадке, имеющей уклон к горизонту 5°, без каких-либо рекомендаций на способ установления соблюдения этого требования. В ГОСТ 12910-79 "Экскаваторы одноковшовые универсальные. Правила приемки и методы периодических испытаний" эти рекомендации также отсутствуют.
В ходе экскавационных работ около 60% времени цикла расходуется на поворот платформы с одновременным манипулированием рабочим оборудованием для выполнения операций подъема ковша с грунтом на необходимый уровень, разгрузку ковша и возврат ковша в забой. Сокращение этого времени в результате увеличения мощности привода позволило бы значительно повысить производительность экскаватора. Однако с увеличением мощности возрастают скорости рабочих операций и силы инерции, стремящиеся опрокинуть экскаватор. В таком случае эффективность и безопасность работы одноковшовых экскаваторов существенно зависят от способности противодействовать опрокидыванию. При выполнении процесса копания опасность опрокидывания экскаватора отсутствует из-за постоянного контакта рабочего органа с поверхностью грунта забоя и возможности оператора постоянно контролировать положение экскаватора относительно опорной поверхности.
Рассмотрим процесс формирования методики сертификационного испытания одноковшового универсального полноповоротного экскаватора с целью оценки его устойчивости при выполнении рабочих операций с поворотом платформы. Этому процессу, как указывалось ранее, предшествует анализ контролируемого явления, необходимый для обоснования методики сертификационного испытания.
В нашем случае целью испытания является получение объективной информации экспериментальным путем, подтверждающей способность экскаватора противодействовать опрокидыванию в процессе поворота платформы с груженым ковшом при одновременном манипулировании рабочим оборудованием.
Для достижения поставленной цели необходимо решить следующие задачи:
1.Произвести анализ динамики процесса поворота платформы экскаватора с одновременным манипулированием рабочим оборудованием с целью определения наихудшего для устойчивости варианта совмещения движений.
2.Определить взаимное положение элементов конструкции экскаватора, наиболее неблагоприятное для его устойчивости.
3.Разработать алгоритм действия процесса испытания экскаватора на устойчивость против опрокидывания.
4.Определить состав необходимого оборудования и средств измерения для проведения сертификационного испытания экскаватора на устойчивость.
Решение вышеперечисленных задач экспериментальным способом практически возможно. Однако в этом случае для получения надежных результатов потребуются огромные затраты времени и средств. Поэтому перед разработкой методики проведения сертификационного испытания целесообразно произвести теоретический анализ процесса опрокидывания экскаватора.
Согласно общеизвестным методикам доказательством достаточной устойчивости экскаватора является выполнение условия
 .
.
где M y и М о - суммы моментов относительно ребра опрокидывания всех удерживающих и опрокидывающих сил; К - коэффициент запаса устойчивости.
Проверка устойчивости выполняется для нескольких расчетных положений: при максимальном вылете ковша с грунтом; при движении экскаватора под уклон и т.д.
При всей простоте изложенной методики её практическая реализация вызывает затруднения, что объясняется отсутствием ГОСТа или иных норм, регламентирующих проверку устойчивости экскаватора. В методиках, разработанных предприятиями и ВНИИСДМ, не учитываются в полной мере динамические нагрузки. В частности, не принимаются во внимание нагрузки, вызванные движением стрелы, рукояти и ковша, не учитывается действие касательных инерционных сил от поворота платформы, а также сил Кориолиса. Динамические нагрузки, вызванные разгоном (торможением) механизмов, вводятся в расчеты без учета длительности их действия.
При воздействии на экскаватор большой кратковременной динамической нагрузки может произойти отрыв от основания опор, не лежащих на ребре опрокидывания, однако, не обязательно последует опрокидывание. Опыт эксплуатации экскаваторов подтверждает возможность кратковременного нарушения контакта опор с основанием при последующем его восстановлении, что в расчетах не учитывается.
Таким образом, методика расчета устойчивости экскаватора нуждается в дальнейшем совершенствовании. Для создания же методики сертификационного испытания устойчивости экскаватора необходим теоретический анализ динамики процесса поворота экскаватора относительно ребра опрокидывания. При этом необходимо исследовать всю область возможных положений платформы, стрелы, рукояти и ковша с целью определения наиболее неблагоприятного положения для устойчивости экскаватора, при котором следует производить сертификационное испытание.
Опасность потери устойчивости возникает в случае, если суммарный опрокидывающий момент М о от действия внешних сил будет превышать суммарный удерживающий момент М у. В этом случае начинается поворот экскаватора относительно ребра опрокидывания, чему противодействуют удерживающий момент и момент инерции сопротивления опрокидыванию. Если длительность действия и значения динамических нагрузок достаточно велики, то происходит опрокидывание, В противном случае экскаватор только качнется на определенный угол и возвратится в устойчивое состояние.
Элементы конструкции экскаватора и груз (в ковше или подвешенный к ковшу) совершают следующие движения: поворот платформы, поворот (подъем или опускание) стрелы, повороты рукояти и ковша. Эти движения могут быть установившимися или неустановившимися (разгон или торможение элементов), причем некоторые движения могут быть одновременными. В процессе движений меняются количество действующих нагрузок, их значения и плечи до ребра опрокидывания. Поэтому при проверке устойчивости необходимо исследовать всю область возможных положений экскаватора и рабочего оборудования, а также решить две задачи: определить наихудший вариант совмещения движений, допускаемый гидросистемой и системой управления экскаватора, и определить взаимное положение элементов, наиболее неблагоприятное для устойчивости экскаватора. Далее необходимо оценить возможность потери устойчивости экскаватора с учетом длительности действия и изменений нагрузок в функции времени.
Рассмотрим экскаватор, состоящий из следующих элементов (рис. 6): А1 - противовес; А2 - платформа с оборудованием; A3 - ходовая тележка; А4 - стрела (с гидроцилиндрами стрелы и рукояти); А5 - рукоять (с гидроцилиндром и механизмом поворота ковша); А6 - ковш с грунтом и А7 - груз (если подвешивается).
Приближенно можно принять, что нагрузки приложены в центрах тяжести элементов, на каждый из которых действуют (на примере ковша):
сила G тяжести, линия действия которой проходит через центр тяжести перпендикулярно к горизонтальной плоскости;
центробежная сила Рцп от поворота платформы, проходящая через центр тяжести ковша и; пересекающая ось поворота платформы под углом 90°,
касательная сила Рип инерции от торможения (разгона) платформы, направленная параллельно опорной плоскости и перпендикулярно к плоскости симметрии рабочего оборудования;
центробежная сила Рцс, от поворота стрелы, линия действия которой проходит через центр тяжести ковша и пяту стрелы;
касательная сила Рис, инерции от торможения (разгона) опускающейся (поднимающейся) стрелы, расположенная в плоскости рабочего оборудования и перпендикулярно к силе Рцс;
центробежная сила Рцр от поворота рукояти, линия действия которой проходит через центр тяжести ковша и шарнир стрела - рукоять;
касательная сила Рир инерции от торможения (разгона) опускающейся (поднимающейся) рукояти, расположенная в плоскости рабочего оборудования и перпендикулярно к силе Рцр;
составляющие силы Кориолиса, возникающие при совмещениях поворотов платформы и стрелы Ркс и поворотов платформы и рукояти Ркр, направленные параллельно опорной поверхности и перпендикулярно к плоскости рабочего оборудования;
сила Рв ветрового давления, направленная в сторону наибольшего уклона параллельно опорной поверхности.
Аналогичные силы действуют и на другие элементы экскаватора.
С момента начала опрокидывания экскаватора к перечисленным выше силам добавляются нагрузки, сопутствующие повороту экскаватора относительно ребра опрокидывания (см. рис. 6):
Рцо - центробежная сила от поворота экскаватора относительно ребра опрокидывания, линия действия которой проходит через центр тяжести элемента перпендикулярно к ребру опрокидывания;
Рио - касательная сила инерции от неравномерного движения опрокидывания экскаватора, проходящая через центр тяжести элемента перпендикулярно к центробежной силе от опрокидывания Рцо, и расположенная в плоскости, перпендикулярной к ребру опрокидывания;
Ркпо - составляющая силы Кориолиса, возникающая при совмещении поворотов платформы и экскаватора при опрокидывании, проходящая через центр тяжести элемента перпендикулярно к опорной плоскости экскаватора;
Рксо и Ркро - составляющие силы Кориолиса, возникающие при совмещении поворотов стрелы и экскаватора и поворотов рукояти и экскаватора при опрокидывании, направленные через центр тяжести элемента перпендикулярно к проекции вектора относительной скорости поворота соответственно стрелы и рукояти на плоскость, перпендикулярную к ребру опрокидывания.
Численные значения всех вышеупомянутых сил определяются по известным формулам механики.
Силы тяжести всех элементов экскаватора G, угловые скорости со, угловые ускорения s и радиусы вращения r определяются из конструкторской документации.
Центробежные силы рассчитываются по формуле
Pц=G·ω2·r/g, Н,
где g - ускорение силы тяжести, м/с2.
Касательные силы инерции, действующие при торможении вращающихся элементов, определяются по формулам
Ри= G·ε·r/g, или Ри= G·ω ·r/(g·t), Н,
где g - время торможения, с.
Силы Кориолиса, действующие при совмещении, например, поворотов платформы и стрелы, определяются по формуле
Pкс=G·(2· ωп Vотн ·sinδ)/g, Н,
где ωп - угловая скорость платформы, 1/с; Vотн = ωс·r - линейная относительная скорость центра тяжести рассчитываемого элемента, м/с; ωс- угловая скорость стрелы, 1/с; r- расстояние от центра тяжести элемента до шарнира поворота стрелы, м; δ - угол между векторами угловой скорости платформы и относительной скорости центра тяжести элемента, рад.
Определение удерживающего и опрокидывающего моментов состоит в суммировании моментов, создаваемых отдельными нагрузками, действующими на элементы экскаватора. При этом решается достаточно сложная задача определения координат точек приложения сил и плеч действующих сил до ребра опрокидывания с учетом положения платформы и рабочего оборудования, а для сил тяжести - с учетом угла наклона опорной площадки экскаватора к горизонту.
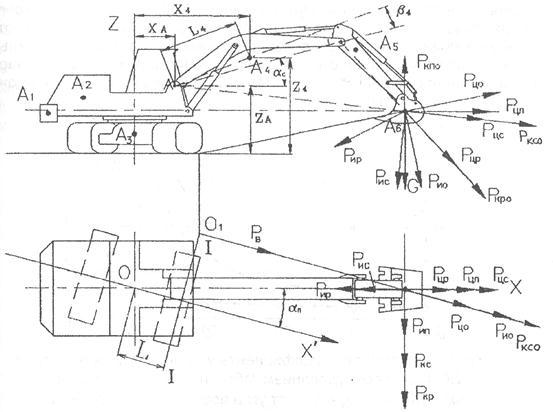
Рис. 6. Силы, действующие на экскаватор (на примере ковша)
Анализ устойчивости экскаватора требует выполнения трудоёмких расчётов. Для каждого из возможных расчетных положений, определяемых различными сочетаниями углов поворота платформы, стрелы, рукояти и ковша, необходимо вычислить моменты от 73 нагрузок, что с учётом нескольких тысяч расчетных положений*, подлежащих исследованию, приводит к необходимости использовать ЭВМ.
Воспользуемся программой вычислений, основанной на изложенных выше теоретических положениях, которая предназначена для решения следующих задач: определение наихудшего с точки зрения устойчивости расчетного положения; определение максимальной грузоподъемности; построение-зависимостей грузоподъемности от вылета рабочего оборудования экскаватора; назначение допустимых скоростей и ускорений движения элементов экскаватора; оценка качества экскаватора с учетом его устойчивости. Программу можно использовать для анализа устойчивости как в случае жесткого крепления груза
____________________________
* Так, например, если диапазоны изменения угловых положений платформы, стрелы и рукояти разделить на 10 интервалов, то необходимо произвести вычисление моментов от 73 нагрузок для 103 расчетных положений.
(захват челюстями, подъём грунта в ковше и т.д.), так и в случае крепления груза на гибкой подвеске. В программе можно учитывать и отклонение подвешенного груза под действием центробежной силы, возникающей при повороте платформы. Программа обеспечивает расчет и анализ устойчивости экскаватора для всей области возможных положений оборудования.
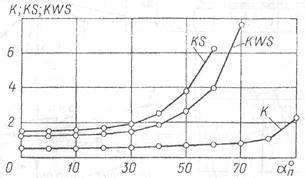
Рис.7. Зависимость коэффициента устойчивости экскаватора ЭО-4124 с оборудованием "обратная лопата" и ковшом вместимостью q = 1 м3 от угла поворота платформы αп.
Обозначения: KS - коэффициент статической устойчивости, определяемый с учетом только сил тяжести элементов конструкции экскаватора и грунта в ковше; KWS - коэффициент устойчивости, определяемый согласно методике ВНИИСДМ с учетом сил тяжести и центробежных сил, действующих на элементы конструкции экскаватора при повороте платформы; К - коэффициент устойчивости, определяемый с учетом сил тяжести, центробежных и инерции, включая силы Кориолиса, и силы ветрового давления. При αп = 0 положение рабочего оборудования перпендикулярно к гусеничному ходу.
Рассмотрим результаты анализа устойчивости экскаватора ЭО-4125. На рис.7 приведены зависимости коэффициентов устойчивости экскаватора ЭО-4125, полученные по различным методикам, от угла αп поворота платформы.
Значения KS, KWS и К соответствуют наихудшему для устойчивости сочетанию углов наклона стрелы, рукояти и ковша. Расчеты по известным методикам показали, что устойчивость экскаватора ЭО-4125 обеспечивается при любых углах αп, так как значения коэффициентов KS и KWS больше единицы. Уточненный же расчёт показал, что при αп = 0 - 80° коэффициент К < 1, что свидетельствует об отрыве от основания опор, не лежащих на ребре опрокидывания. Однако согласно расчетам экскаватор не опрокидывается ввиду кратковременного действия динамических нагрузок; он только приподнимается относительно опорной поверхности на угол, не превышающий 2°.
Из рис. 7 видно, что наихудшим для устойчивости является положение платформы экскаватора, определяемое углом αп от 0 до 20°. Зависимости углов наклона стрелы αс, рукояти αр и ковша αк, соответствующих этому положению, от угла поворота платформы показаны на рис. 8.
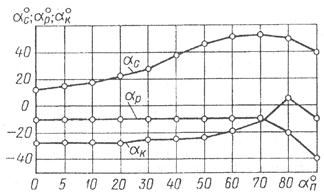
Рис.8. Зависимости углов наклона стрелы, рукояти и ковша (q =1 м3), соответствующих наихудшей устойчивости экскаватора, от угла поворота платформы
При αп = 0 - 10° наихудшее по устойчивости состояние экскаватора характеризуется положением рабочего оборудования, близким к горизонтальному. При αп = 50 -70° опасное положение наступает при положении стрелы, поднятой на максимальную высоту.
Анализ расчета составляющих опрокидывающего момента показал, что в расчетах устойчивости экскаватора, помимо моментов центробежных сил, необходимо учитывать моменты касательных сил инерции и сил Кориолиса, существенно влияющих на устойчивость экскаватора. При αп = 0 - 20° наибольшее влияние на устойчивость оказывает опрокидывающий момент сил инерции торможения стрелы. При αп = 50 - 80° наибольшее влияние на устойчивость оказывают опрокидывающий момент сил Кориолиса при совмещении поворотов платформы и стрелы и момент сил инерции торможения платформы.
Поэтому при сертификации экскаватора рекомендуется проводить два испытания на устойчивость.
Испытание №1 заключается в одновременном торможении платформы и стрелы в момент достижения ими контрольных углов: αпк = 0°, αск = 12°. Рукоять и ковш остаются неподвижными относительно стрелы: αрк = -10°, αкк = -27°. Это сочетание углов соответствует наименьшему значению коэффициента запаса устойчивости.
Испытание №2 заключается в одновременном торможении платформы и стрелы в момент достижения ими контрольных углов:
αпк = 55°, αск = 50°. Рукоять и ковш также остаются неподвижными:
αрк = -10°, αкк = -17°. Более существенное влияние на устойчивость силы Кориолиса и силы инерции торможения платформы оказывают при больших значениях угла поворота платформы, но с увеличением αп относительно 55° резко возрастает значение коэффициента запаса устойчивости.
В обоих случаях платформа должна вращаться в сторону уменьшения значения угла её поворота, а стрела опускаться. Опускание стрелы следует начинать при уже установившемся движении платформы.
Перед проведением испытаний необходимо определить исходные значения углов поворота платформы и стрелы, а также значение угла поворота αпс платформы, при котором следует начать опускание стрелы. Исходные значения угла поворота платформы и стрелы должны быть такими, чтобы к моменту достижения стрелой контрольного угла, а платформой угла αпс в ходе испытания их скорости приобрели бы номинальные значения. Определение значения угла αпс необходимо для обеспечения одновременного достижения платформой и стрелой контрольных углов. План проведения испытаний:
а) установить экскаватор на наклонную площадку таким образом,
чтобы ребро опрокидывания располагалось горизонтально;
б) закрепить экскаватор страховочными цепями;
в) прогреть двигатель и рабочую жидкость;
г) установить в исходное положение платформу, стрелу, рукоять и
ковш;
д) включить механизм поворота платформы;
е) при прохождении платформой угла αпс начать опускание стрелы;
ж) в момент, когда платформа и стрела примут контрольные положения, произвести торможение стрелы и платформы;
з) зафиксировать результат испытания.
Для получения достоверных результатов испытания необходимо повторить несколько раз.
Представленный теоретический анализ позволяет сформулировать требования, соблюдение которых необходимо для организации сертификационного испытания экскаватора на устойчивость:
1. Перед производством сертификационного испытания устойчивости экскаватора с целью определения наихудших для устойчивости угловых положений элементов его конструкции необходим теоретический анализ динамики процесса опрокидывания экскаватора в условиях возможного совмещения рабочих движений в режиме разгона или торможения элементов его конструкции.
угловых положений элементов его конструкции необходим теоретический анализ динамики процесса опрокидывания экскаватора в условиях возможного совмещения рабочих движений в режиме разгона или торможения элементов его конструкции.
2. Для производства теоретического анализа устойчивости экскаватора необходимо располагать следующей информацией:
масса и координаты центров тяжести составных элементов конструкции: ходовое оборудование (с выносными опорами, если они имеются); поворотная платформа с установленным на ней оборудованием; противовес; стрела; рукоять; ковш с перемещаемым материалом; если в инструкции на эксплуатацию допускается использование экскаватора с различным сменным оборудованием, то его характеристики в собранном состоянии (при наличии гибкой связи указать диапазон изменения её длины);
геометрические характеристики опорного контура экскаватора;
границы диапазона изменения взаимных угловых положений элементов рабочего оборудования (платформы, стрелы, рукояти, ковша);
угловые скорости и ускорения перемещения платформы, стрелы, рукояти, ковша.
3.Экспериментальную оценку устойчивости экскаватора необходимо производить в условиях неустановившегося режима движения (разгон-торможение) платформы, стрелы, рукояти одновременно. Исходным условием для начала режима ускоренного движения являются взаимные положения элементов рабочего оборудования экскаватора.
4.Для экспериментальной оценки устойчивости экскаватора необходимо располагать следующим оборудованием и оснасткой:
наклонной под углом 5° к горизонту площадкой для установки испытуемого экскаватора (требование ГОСТа);
предохранительными цепями с анкерным креплением для предупреждения падения экскаватора (длина цепей определяется максимальным углом поворота экскаватора относительно ребра опрокидывания, что необходимо определить при теоретическом анализе);
грузом, имитирующим грунт в ковше;
средствами измерения угловых скоростей и ускорений движения элементов конструкции экскаватора;
средствами связи и сигнализации между руководителем испытаний и оператором;
методикой проведения сертификационного испытания с указанием алгоритма действий лабораторного персонала и оператора в процессе оценки устойчивости экскаватора.
Кабина оператора должна быть обеспечена ремнями безопасности и системой защиты ROPS.
На опорной поверхности, платформе, стреле, рукояти и ковше должна быть нанесена разметка, позволяющая оператору определять их угловые координаты.
Необходимо составить протокол-отчёт о сертификационном испытании, содержащий информацию об испытуемой машине, условиях проведения испытания, результатах теоретического анализа и экспериментальные данные, характеризующие устойчивость экскаватора. В нём должно быть заключение о возможности допуска к эксплуатации экскаватора согласно положению по устойчивости, определяемому ГОСТ 30067-93.
Предложенная методика и математическая модель, использованная для её создания, могут оказаться полезными для расчета экскаваторов на устойчивость при проектировании; создания единых норм (стандартов) проверки устойчивости экскаваторов; обоснования методики сертификационных испытаний экскаваторов на устойчивость при производстве работ с использованием различного сменного оборудования и возможности подъема грузов экскаватором с помощью грузового звена или гибкой сцепки; создания устройств контроля устойчивости экскаваторов в процессе работы- и автоматических систем защиты от опрокидывания; обоснования модернизации экскаваторов в части, связанной с увеличением мощности двигателя, сокращением времени цикла, изменением размеров опорного контура и других параметров устойчивости; сравнения экскаваторов, выпускаемых разными производителями; принятия решения о приобретении зарубежной техники и обоснования преимуществ продаваемых экскаваторов и т.д.
В заключение следует отметить следующее.
Существующие методики расчетной оценки устойчивости экскаваторов приводят к завышенным коэффициентам устойчивости.
Моменты некоторых центробежных и инерционных сил, а также сил Кориолиса, не учитывающиеся в существующих методиках, являются значимыми, и их необходимо учитывать в расчетах. Ветровую нагрузку при оценке устойчивости экскаваторов можно не учитывать.
Для проверки устойчивости экскаватора необходимо исследовать всю область возможных положений платформы и рабочего оборудования.
Устойчивость необходимо оценивать на основе исследования динамики процесса поворота машины относительно ребра опрокидывания, чтобы установить произойдёт ли кратковременный отрыв опор от грунта или опрокидывание экскаватора.
Применяемые в настоящее время расчетные методы оценки устойчивости экскаваторов по величине отношения суммарного удерживающего момента к суммарному опрокидывающему моменту сил, действующих на экскаватор, не могут быть признаны объективными, так как в случае учета моментов всех сил коэффициент запаса устойчивости современных конструкций экскаваторов меньше единицы.
Для объективного обоснования запаса устойчивости экскаватора необходимо специальное исследование, направленное на разработку критерия оценки устойчивости экскаваторов и уточнение методики сертификационных испытаний.
Задание для самостоятельной работы
На основе анализа информации о сертификационном испытании устойчивости экскаватора разработать алгоритм действия участников процесса испытаний. Разработать предложения по обеспечению независимости экспериментальных данных от квалификации персонала испытателей.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 2853; Нарушение авторских прав?; Мы поможем в написании вашей работы!