КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Основные понятия и определения. Современные методы кинематического и динамического исследования механизмов определяется их структурой
|
|
|
|
СТРУКТУРНЫЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Современные методы кинематического и динамического исследования механизмов определяется их структурой. Поэтому анализ любого механизма начинается с изучения его строения и классификации.
Рассмотрим вначале основные понятия и определения, которыми будем пользоваться при изучении курса теории механизмов и машин.
Деталь – часть машины, изготовленная без сборочных операций.
Звено – одна или несколько деталей, жестко соединенных между собой, и перемещающихся при работе машины как одно целое. В рамках нашего курса звено рассматривается как абсолютно жесткое тело. Например, шатун двигателя является одним подвижным звеном, хотя и состоит из нескольких деталей.
Стойка – неподвижное звено (станина, корпус).
При решении инженерных задач анализа и синтеза механизмов изображение механизма упрощают, абстрагируясь от реальных форм звеньев и кинематических пар, их условным изображением. Такое упрощенное изображение механизма называют структурной или кинематическая схема механизма. Для изображения схем используют графические изображения, установленные ЕСКД (ГОСТ 2.701; ГОСТ 2.703; ГОСТ 2.721). Условные изображения звеньев показаны на рис. 1.1 и табл. 1.1.
Входное звено – это звено, которому сообщается движение для преобразования в требуемые движения других звеньев.
Выходное звено – это звено, совершающее движение, для которого создан механизм. Все остальные звенья являются промежуточными или соединительными.
Начальное звено – это звено, которому приписывается одна или несколько обобщенных координат.
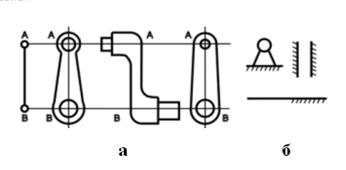
Рис. 1.1. Условные изображения звеньев: а – подвижное звено, б – стойки.
Кинематическая пара – подвижное соединение двух звеньев, находящихся в соприкосновении.
Те точки, линии, или поверхности, по которым происходит соприкосновение звеньев, называются элементами кинематической пары.
Из определения кинематической пары следует, что ее существование определяется тремя условиями: наличием двух звеньев, их непосредственным контактом, возможностью относительного перемещения одного звена относительно другого. Кинематическая пара перестает существовать, если нарушено хотя бы одно из этих условий.
Таблица 1.1
Условное обозначение звеньев на схемах механизмов
| Наименование условно изображенного звена | кривошип | коромысло | шатун | ползун | кулиса | Зубчатое колесо |
| Условное обозначение звена | 
| 
| 
| 
| 
| 
|
Способ соединения звеньев накладывает на относительное движение каждого звена кинематической пары ограничения, которые должны выполнятся при любых силах, действующих на звенья. Это ограничение называется связями. Следует отметать, что любую связь можно отбросить, заменив ее действие реакцией.
Известно, что свободно движущееся тело в пространстве обладает 6-ю степенями свободы. Число условий связи S, наложенных на относительное движение звена кинематической пары может изменяться в пределах  .
.
Подвижность кинематической пары (Н) – число степеней свободы звена в относительном движении ее звеньев. Различают одно, двух, трех, четырех и пяти подвижные кинематические пары. Следовательно, имеет место соотношение
H = 6 – S.
1.2 Классификация кинематических пар (рис 1.2...1.3 и табл. 1.2)
Для удобства структурного анализа механизмов кинематические пары классифицируются по различным признакам:
1. По числу условий связей пары делят на 5 классов
(терминология И. И. Артоболевского), номер класса равен количеству связей, наложенных на относительное движение звеньев.
2. По виду элементов пары делят на низшие и высшие. К низшим относят кинематические пары, элементами которых являются поверхности. Элементами высших пар являются линии или точки (рис 1.3 а, б).
3. По характеру относительного движения звеньев различают поступательные и вращательные кинематические пары.
На рис. 1.2. изображены пары 1-го, 2-го, 3-го и 4-го классов. Рассмотрим их подробнее.
| |||
| |||
|
|

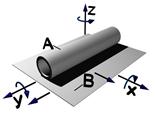
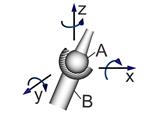
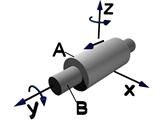
Рис 1.2. Кинематические пары 1...4 классов
Пара 1-го класса (рис. 1.2.а) – шар на плоскости. Наложено одно условие связи: исключено поступательное движение вдоль оси «Z».
Пара 2-го класса (рис. 1.2.б) – цилиндр на плоскости. Наложено два условия связи: исключено поступательное движение вдоль оси «Z» и вращательное вокруг оси «X».
Пара 3-го класса (рис. 1.2.в) – шаровой цилиндр. Наложено три условия связи: исключены поступательные движения вдоль всех трёх осей.
Пара 4-го класса (рис. 1.2.г) – втулка на валике. Наложено четыре условия связи, исключены поступательные и вращательные движения вдоль осей «X» и «Z».
На рис. 1.3. показаны кинематические пары 5-го класса:
1) Вращательная (рис. 1.3. а) – цилиндрический шарнир. Наложено пять условий связи: исключены все движения, кроме вращательного.
2) Поступательная (рис. 1.3. б) – наложено пять условий связи: исключены все движения, кроме одного поступательного.
3) Винтовая (рис. 1.3. в) – наложено пять условии связи: исключены все движения, кроме поступательного. (Вращение не вносит степени свободы, т.к. в данном случае поступательное и вращательное движения не независимы).
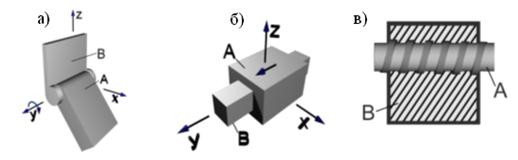
Рис. 1.3. Кинематические пары 5-го класса.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 430; Нарушение авторских прав?; Мы поможем в написании вашей работы!