КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Трение в винтовой кинематической паре
|
|
|
|
ЛЕКЦИЯ 17
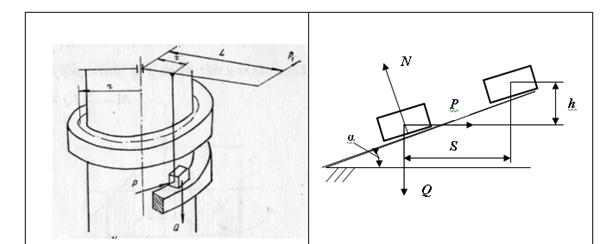
На рис.9.6, а показана винтовая кинематическая пара с прямоугольной нарезкой. При определении силовых зависимостей этой паре допускаем, что удельное давление по опорной поверхности винтовой нарезки распределяется равномерно.
Пространственную задачу заменяем плоской, развертывая среднюю линию винтовой нарезки на плоскость.
На основании первого допущения расчетную схему можно представить в виде, изображенном на рис. 9.6, б. Здесь осевая сила взаимодействия винта и гайки Q представлена как сила, действующая на ползун, перемещающийся по винтовой нарезке со средним радиусом r. Сила Р (условная), перемещающая ползун, является результатом приложения искомой силы Р 1, создающей момент M.
На основании второго допущения ползун будет находиться на наклонной плоскости (рис.9.7) с углом наклона α, равным углу подъема средней линии винтовой нарезки.
а б
Рис. 9.6. Винтовая кинематическая пара с прямоугольной нарезкой
а – винтовая пара; б – расчетная схема.
На ползун действуют силы Р и Q, нормальная сила N со стороны плоскости и сила трения Р. Полагаем, что ползун перемещается вверх по наклонной плоскости, т. е. в обратную сторону действия осевой силы Q, с постоянной скоростью.
Определим движущую силу Р по выражению (5.1) для общего случая положения ползуна на наклонной плоскости при  :
:
 и
и  (9.6)
(9.6)
Если же ползун под действием этих сил будет перемещаться вниз по наклонной плоскости, т. е. в сторону действия осевой силы в винтовой паре, то
так как сила трения будет уже направлена в обратную сторону, и равнодействующая сил трения и нормального давления будет отклонена от направления нормали на угол трения также в другую сторону, т.е. в этом случае в силовом треугольнике угол между Q и R
(см. рис. 9.4) будет равен α – φ.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 991; Нарушение авторских прав?; Мы поможем в написании вашей работы!