КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тенденции развития автоматизированного электропривода станков и промышленных роботов
|
|
|
|
В настоящее время существуют устойчивые тенденции развития электропривода, которые отражают как общие направления развития электротехники и электроники, так и особенности развития станкостроения. Рассмотрим наиболее характерные тенденции развития автоматизированного электропривода.
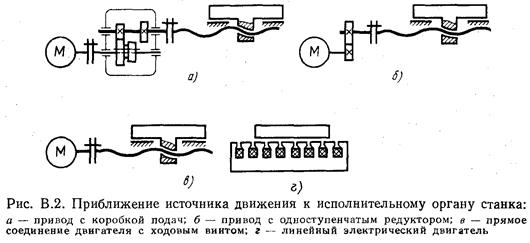 I. Приближение источника движения к исполнительному органу (рис. В.2). Эта тенденция и в приводе подачи станка и в приводе главного движения приводит к упрощению конструкции механической части привода, увеличению ее жесткости, улучшению динамических качеств и повышению кинематической точности промежуточных передач.
I. Приближение источника движения к исполнительному органу (рис. В.2). Эта тенденция и в приводе подачи станка и в приводе главного движения приводит к упрощению конструкции механической части привода, увеличению ее жесткости, улучшению динамических качеств и повышению кинематической точности промежуточных передач.
В приводе подач механические передачи сведены к минимуму и часто вал двигателя непосредственно может быть соединен с ходовым винтом, который является единственным механическим устройством преобразования вращательного движения в поступательное. Применение линейных двигателей позволяет устранить и этот рудиментарный элемент и приложить электромеханические усилия к поступательно движущемуся узлу станка.
Аналогичные тенденции наблюдаются и в приводе главного движения. Однако полное исключение механических передач ограничивается малым диапазоном регулирования электропривода с постоянной мощностью.
Исключение механических передач (коробок скоростей и коробок подач станков) возможно только при широком диапазоне регулирования скорости.
Механические передачи задерживают и существенно сглаживают низкие частоты, возникающие в приводе, поэтому редуктор с небольшим передаточным отношением по этой причине может быть полезным. В приводе роботов редуктор сохраняется, поскольку исключение механических передач и применение тихоходных двигателей, как правило, увеличивает его размеры и массу. В электромеханических ПР двигатель и редуктор встраивают в сочленение звеньев.
Важное значение имеет разработка электромагнитных механизмов для вспомогательных движений в станках. Функциональные, фиксирующие и другие движения могут быть осуществлены путем использования прямоходовых или поворотных электромагнитов с соответствующей системой управления.
II. Использование специальных более совершенных исполнительных двигателей. Доля специальных двигателей, предназначенных для станков и ПР, непрерывно увеличивается. Для станков необходимы двигатели, способные обеспечить необходимые статические и динамические характеристики на всем диапазоне регулирования скорости, который достигает десятков тысяч. Двигатели для станков не должны быть энергонасыщены во избежание передачи на станок тепловых и механических возмущений.
Важным условием является оснащение двигателей вспомогательными информационными и управляющими устройствами, такими, как тахогенератор, датчик угла (резольвер), тормоз и тепловая защита.
В приводе подачи высокоавтоматизированных станков и ПР применяют двигатели следующих типов:
1. Двигатели постоянного тока традиционного исполнения с улучшенными статическими и динамическими характеристиками, имеющими уменьшенный момент инерция якоря, повышенную перегрузочную способность и улучшенную коммутацию.
2. Малоинерционные двигатели постоянного тока, в которых рекордное быстродействие обеспечивается за счет продольного снижения момента инерции якоря. Наиболее распространены двигатели с дисковым якорем, имеющим печатную или штампованную обмотку, и двигатели с гладким цилиндрическим якорем, у которых длина больше диаметра. Во всех случаях такие якоря обладают малой массой, что уменьшает постоянную времени нагрева и исключает длительную работу машины с моментом нагрузки, превышающим номинальный. Малоинерционные двигатели, так же как и двигатели традиционного исполнения, соединяют с ходовым винтом станка через промежуточную механическую передачу.
3. Высокомоментные двигатели — это тихоходные двигатели постоянного тока с возбуждением от постоянных магнитов. Массивный якорь обеспечивает термическую инерционность и как следствие, возможность длительно работать с большим перегрузочным моментом (такие двигатели допускают 6—10-кратную перегрузку по моменту). Особенностью этих двигателей является возможность приводить в движение ходовой винт станка, минуя промежуточные механические передачи.
Электропривод подачи с высокомоментными двигателями обеспечивает диапазон регулирования скорости порядка нескольких тысяч.
Использование постоянных магнитов обеспечивает постоянство магнитного потока в динамических режимах и высокий динамический момент. Высокомоментные двигатели не имеют потерь в цепи возбуждения и по размерам меньше, чем аналогичные двигатели с электромагнитным возбуждением. Однако отсутствие дополнительных полюсов приводит к коммутационным ограничениям по нагрузке и скорости, что заставляет применять зависимое токоограничение, при котором допустимая нагрузка уменьшается по мере возрастания скорости.
4. Дальнейшим развитием конструкции машин постоянного тока являются бесконтактные двигатели, представляющие собой синхронную машину с возбуждением от постоянных магнитов и инвертором, управляемым специальным датчиком в зависимости от угла поворота ротора. В бесконтактных двигателях устранен коллекторно-щеточный узел, что повышает срок службы двигателя и снимает коммутационные ограничения по моменту и скорости.
5. Линейные электродвигатели в станкостроении применяют редко. В большинстве случаев их рабочие характеристики (тяговая сила и линейная скорость) не соответствуют требованиям технологического процесса. Исключение составляют малые станки и ПР. Основное применение линейные двигатели должны найти в электроприводе вспомогательных перемещений.
6. Область применения дискретных (шаговых) двигателей постепенно сужается. В настоящее время шаговые двигатели в приводе подачи станков с ЧПУ применяют редко. Вместе с тем на современных станках есть немало видов движений, которые удобно осуществлять с помощью шаговых двигателей (малые периодические дозируемые подачи в станках шлифовальной группы, движения, связанные с компенсацией износа инструмента, точные угловые перемещения и др.).
7. В настоящее время регулируемый электропривод на основе асинхронного двигателя базируется на серийных двигателях. В дальнейшем станкостроению обязательно потребуется двигатель, предназначенный для работы в широком диапазоне изменения скорости и оснащенный вспомогательными устройствами и датчиками обратной связи.
В приводе главного движения станка основное значение имеет нерегулируемый асинхронный короткозамкнутый двигатель. Значительную роль играют двигатели постоянного тока с электромагнитным возбуждением в регулируемом электроприводе с двухзонным управлением. Здесь также необходимы электродвигатели с расширенным диапазоном регулирования изменением магнитного потока, что позволит полностью отказаться от механического регулирования скорости при постоянной мощности и значительно упростить конструкцию станка.
III. Совершенствование полупроводниковой элементной базы. Совершенствование электропривода тесно связано с развитием полупроводниковой техники, являющейся базой для создания силовых преобразователей и схем управления. Происходит непрерывное улучшение технических характеристик тиристоров, которые являются основным силовым элементом электропривода, но обладают ограниченным управлением. Создаются более перспективные, полностью управляемые транзисторные силовые преобразователи. Непрерывное повышение степени интеграции полупроводниковых устройств выражается в создании силовых полупроводниковых модулей, что позволяет повысить надежность преобразователя, уменьшить его размеры и упростить монтаж. Важным направлением развития элементной базы является создание специализированных интегральных схем для системы управления приводом. Такие схемы включают в себя устройства управления силовыми тиристорами, регуляторы привода, блоки токоограничения и др.
IV. Расширение функциональных свойств электропривода. Функции, которые выполняет электропривод, непрерывно расширяются. Если раньше электропривод считался источником равномерного движения, а все сложные взаимосвязанные перемещения формообразования выполнялись механизмом станка, то в настоящее время положение резко изменилось.
В современных станках редко применяют мальтийские кресты, неполные зубчатые колеса и другие сложные механизмы для движений с остановками и точным позиционированием, так как их функции выполняет электропривод. При этом гибкая система управления обеспечивает оптимальные значения ускорений в электромеханической системе станка при необходимой точности позиционирования.
Электропривод все в большей степени контролирует и ограничивает нагрузки в элементах конструкции станка, что позволяет предотвратить его аварию, контролировать поломку инструмента, уровень силового воздействия в зажимных устройствах и др.
Повышение быстродействия и точности электропривода приводит к тому, что все большее число сложных взаимосвязанных движений деталей и инструмента осуществляется только с помощью электропривода. Наиболее распространенной является функциональная связь нескольких приводов подачи. Такие связи следящих приводов широко используют в станках с ЧПУ. Более сложные функциональные зависимости осуществляют для связи привода главного движения и подачи. В этом случае привод подачи должен обладать превосходными динамическими характеристиками.
Задача обеспечения взаимосвязанных движений с помощью электропривода решена не полностью. Здесь необходимо учесть высокую точность обработки деталей, которая характеризуется относительной погрешностью 10-4... 10-6, что накладывает соответствующие требования на точность воспроизведения электроприводом управляющих движений. Кроме того, для получения качественного изделия необходимо обеспечить инвариантность привода к многочисленным возмущениям, сопутствующим технологическому процессу. Механические кинематические цепи обладают несомненным преимуществом — высокой динамической жесткостью, и системы электропривода уступают им в этом отношении. Дальнейшее развитие принципа инвариантности, создание приводов с комбинированным управлением, несомненно позволят ликвидировать этот недостаток.
Важным направлением является адаптивное управление, повышающее производительность и точность обработки. В системах адаптивного управления обычно стабилизируют один из параметров технологического процесса, например силовой фактор (силу, момент или мощность резания). При этом скорость привода подачи регулируется так, чтобы поддерживать заданный режим работы главного привода. В более сложных системах управления изменяют одновременно скорости главного привода и привода подачи. При этом достигается максимум некоторого показателя эффективности с учетом ограничений по стойкости инструмента, жесткости конструкции станка и др.
V. Увеличение объема информации, поступающей в систему электропривода. Совершенствование систем автоматизированного электропривода связано с непрерывным увеличением объема перерабатываемой информации. Информационные устройства (датчики) в системе электропривода можно разбить на несколько групп. Наибольшее значение имеют датчики параметров движения: скорости и перемещений или угла поворота вала. В системах адаптивного управления необходимо обрабатывать информацию о скорости резания, подаче, перемещениях и деформациях элементов станка, силах резания. Иепользуетея также информация, характеризующая режим работы системы электропривода: напряжение сети, ток двигателя и нагрев обмоток. Специфика метрологического обеспечения электропривода связана с огромным диапазоном регулирования скорости. Датчики параметров движения (пути и скорости) имеют лучшие метрологические характеристики в верхней части этого диапазона, на которой осуществляются малоточные вспомогательные перемещения. Рабочие подачи относят к нижней части диапазона регулирования скорости, но здесь точностные параметры датчиков значительно хуже.
Таким образом, дальнейшее совершенствование электропривода тесно связано с проблемой создания датчиков обратной связи, имеющих одинаковые метрологические характеристики на всем диапазоне регулирования скорости.
VI. Развитие систем цифрового и микропроцессорного управления электроприводом. Развитие систем ЧПУ, проникновение микропроцессорной техники в область управления станками оказывают большое влияние на структуру и технические средства электропривода. Возникает несоответствие между цифровой системой управления станком и аналоговой формой управления в системе электропривода, которое усугубляется наличием импульсного элемента, каковым является тиристорный силовой преобразователь. В результате информация многократно преобразуется из аналоговой формы в цифровую и обратно, что приводит к неизбежным искажениям сигналов и потери точности в системе управления.
Поэтому вполне естественно появление цифрового электропривода, полностью информационно согласованного с системой управления станком. Такой привод может быть осуществлен только на микропроцессорной основе. Электропривод с микропроцессорным управлением характеризуется повышенной точностью, отсутствием дрейфа нуля усилителей, гибкостью системы управления, универсальностью и простотой сопряжения с управляющей ЭВМ, высокой надежностью и возможностью диагностики.
Однако на пути создания цифровых электроприводов возникают трудности, связанные с недостаточным быстродействием микропроцессоров. Преодолеть их можно как путем использования более быстродействующих устройств, так и путем перехода на многопроцессорные системы с параллельной обработкой информации. Применение микропроцессоров позволяет создать новые системы управления электроприводом станков. Это сложные системы управления электроприводом, аппаратная реализация которых затруднена из-за большого числа элементов и громоздкости алгоритма управления.
Огромные возможности открываются перед микропроцессорами при создании самонастраивающихся и оптимальных систем управления станочным электрооборудованием, в электроприводе с моделью, электроприводе с переменной структурой и т. п. современных системах управления.
VII. Комплектные системы электропривода. Современный электропривод станков и ПР выполняется в виде комплекта электрооборудования. Тенденция комплектной поставки (продажи) электрооборудования развивается в двух направлениях.
Во-первых, увеличивается число электроприводов (осей), включаемых в комплект. Вполне естественно, что в комплект входят привод главного движения и все приводы подачи, обеспечивающие многокоординатное перемещение. Подобный подход имеет большие организационные и эксплуатационные преимущества.
Во-вторых, увеличивается объем комплекта. Идеи комплектной поставки, с одной стороны, распространяются на все большую часть электромеханической системы привода. Появляются электромеханизмы, которые включают в себя электродвигатель, редуктор, соединительную муфту и ходовой винт, т. е. по существу все электромеханическое устройство, преобразующее электрическую энергию в энергию механического поступательного перемещения. С другой стороны, происходит интеграция системы управления электроприводом с системой управления технологическим процессом обработки и в комплект электрооборудования включаются многие узлы, предназначенные для этой цели.
Развитие программируемых средств управления позволяет надеяться, что со временем оба эти направления сольются в единый комплект, включающий все энергетические и информационные элементы электрооборудования.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 701; Нарушение авторских прав?; Мы поможем в написании вашей работы!