КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Векторное управление
|
|
|
|
Существует достаточно большое количество преобразователей частоты реализующее векторное управление: ПЧ с АНИ-ШИМ, ПЧ на основе инвертора тока, который реализует как векторное так скалярное управление. Впервые была разработана система векторного управления в 1976-1977гг, называлась – «Трансвектор». Реализованная на аналоговых элементах и в классическом виде представляла прямое векторное управление АМ.
Векторное управление – это управление во вращающейся системе координат, где скорость поля равна скорости координат  , система ориентированна по полю, где вектор потокосцепления ротора
, система ориентированна по полю, где вектор потокосцепления ротора  совпадает с одной из осей.
совпадает с одной из осей.
Согласно математическому описанию проекция вектора  на оси координат однозначно определяют величину электромагнитного момента М и потокосцепления ротора .
на оси координат однозначно определяют величину электромагнитного момента М и потокосцепления ротора .
Для управления АМ необходимо произвести двойное преобразование, т.е. измеренные величины токов в неподвижной системе координат, преобразуются во вращающуюся систему, где осуществляются их регулирование и далее их обратное преобразование. Для осуществления перехода из одной системы в другую, необходимо в каждый момент времени знать угол между системами координат (неподвижной и вращающейся).
Существует несколько способов определения этого угла ( ):
):
- Используются датчики Холла, которые устанавливаются в расточку статора под углом 900 относительно друг друга, при помощи которых определяют величину главного магнитного потока а зазоре.
- Используются измерительные обмотки. Измеряются Е1 и Е2.
- Косвенное определение составляющих магнитного потока, при помощи вычислительных устройств или математической модели АМ. На основе составляющих фазных токов на выходе получаем:
 и
и  .
.
j - АМ во вращающийся системе координат (х, у) представлена векторной диаграммой токов и потокосцеплений, где вектор магнитного потока статора совпадает с осью 0Х, а соответствующие проекции тока статора пропорциональны электромагнитному моменту М и магнитному потоку Ф. При измерении составляющих по осям магнитного потока  определяем модуль главного потокосцепления машины который совпадает с одной из вращающихся осей. Зная составляющие и модуль, можно определить угол между системами координат g.
определяем модуль главного потокосцепления машины который совпадает с одной из вращающихся осей. Зная составляющие и модуль, можно определить угол между системами координат g.
k и l - В системе без измерительных датчиков определение угла между системами координат осуществляется в замкнутой системе на разнице проекций yS на вращающуюся ось координат.

Используемые вычислители потока на основе составляющих фазных значений напряжений и тока определяется оценка составляющих потокосцепления  . С использованием замкнутого контура регулирования магнитного потока устраняется ошибка между проекциями магнитного потока на ось 0Х, что позволяет в каждый момент времени осуществлять коррекцию угла между системами координат.
. С использованием замкнутого контура регулирования магнитного потока устраняется ошибка между проекциями магнитного потока на ось 0Х, что позволяет в каждый момент времени осуществлять коррекцию угла между системами координат.
Функциональная схема системы «Трансвектор»
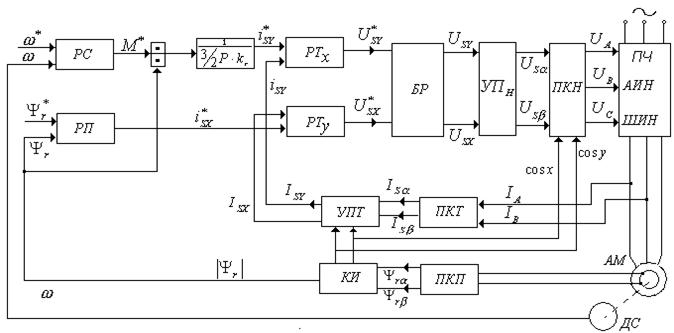
Условные обозначения.
УПТ(Н) – устройство поворота тока (напряжения);
ПК – преобразователь координат, преобразует 3-х фазную систему в 2-фазную:
ПКТ – преобразователь координат тока;
ПКП - преобразователь координат потокосцепления;
ПКН - преобразователь координат напряжения;


РС – регулятор скорости;
РП – регулятор потокосцепления;
РIx, РIy – регуляторы тока по осям 0Х, ОУ;
КИ – координатный индикатор или блок выпрямления угла между системами координат.
Работа схемы.
Система «Трансвектор» реализует векторное управление АМ во вращающейся системе координат, где два замкнутых контура регулирования составляющих тока, осуществляет регулирование электромагнитного момента и магнитного потока. Для определения угла между системами координат используется датчик Холла, ПКП и КН на выходе которого формируются сигналы sing и cosg. Эти сигналы используются для прямого и обратного управления координат, которое осуществляется с помощью УПН и УПТ. На выходе ПКН формируются три управляющих фазных значения, поступающих на ПЧ с ШИМ.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 485; Нарушение авторских прав?; Мы поможем в написании вашей работы!