КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Комплект ЭП-I
|
|
|
|
Используется для станочного ЭП-I и двигателя с пониженным напряжением; в системе используется согласующий трансформатор; система обеспечивает работу во всех 4-х квадрантах. ТП якоря реверсивный, с раздельным управлением, собранная по мостовой схеме. Существует несколько модификаций отличающихся настройкой СУ.
1. Быстро действенный реверсивный ЭП;
2. С обратной связью по ЭДС или скорости.
В системе используется УО вместо контура регулирования тока.
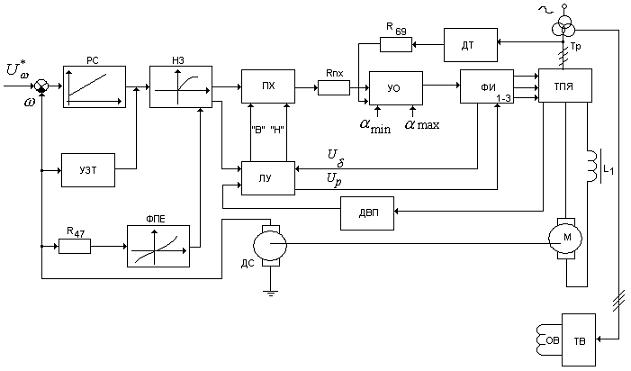
ПХ – переключатель характеристики;
УО – управляемый ограничитель;
ДПВ – датчик проводимости вентилей.
Работа схемы:
СУ одноконтурная с «ПИ» регулятором скорости. Вместо замкнутого КРТ используется УО, который ограничивает углы αнач=110-120o,αмах=150-160оэл, αmin=0,9.Uн.
αнач – при нулевом задании, двигатель неподвижен.
αмах - максимальное U на выходе,
αmin - предельное значение напряжения U, ω.
Есть два подхода к настройке системы
Тя уменьшается, то (Тн+Тя) и РС → «ПИ»;
Тя увеличивается, то РТ → «ПИ» или (Тн+Тя) то уже РС → «ПИД».
В данной системе используется комбинированный способ коррекции, последовательная коррекция на уровне РС и параллельная на уровне КРТ;
rм=Tя/Tм.
В отличие от классической схемы РТ, УО – однополярный и для согласования с реверсом РС используется переключатель характеристики, который преобразует минус на плюс. В системе управления используется два блока: нелинейное звено, осуществляющее линеаризацию выходного напряжения тиристорного преобразователя в области прерывистых токов и функциональный преобразователь ЭДС, осуществляющий линеаризацию зависимости выходного ЭДС от угла управления α. Для ограничения быстродействия в переходных процессах в системе используется узел зависимого токоограничения, который ограничивает выходной сигнал РС (предельное допустимое ускорение). Для работы тиристорного преобразователя якоря (ТПЯ) с раздельным управлением в системе используется датчик проводимости вентилей и логическое переключающее устройство.
Нелинейное звено (НЗ).
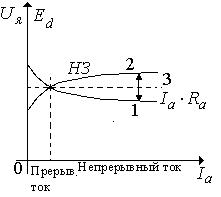
1. входная характеристика;
2. характеристика ИЗ;
3. выходная характеристика.
Функциональный преобразователь ЭДС (ФПЕ – ТЕ, ТЕР)
1 – исходная зависимость;
2 – зависимость ФПЕ;
3 – выходная линейная характеристика (которая необходима).
Переключатель характеристики.
Фазовое управление асинхронными машинами. (дополнение к лекции 17).
Выбор мощности двигателя при фазовом управлении.
При ФУ регулирование скорости двигателя осуществляется за счет изменения скольжения (увеличение), что приводит к увеличению электрических потерь в обмотке ротора. Длительное использование регулирования скорости требует завышения мощности асинхронной машины. Определим критерий выбора мощности и величину предельного скольжения.
ΔPЭл.2=ΔРэм·S ω=ω0·(1-S)
ΔPЭл.2≤ΔРэл2 ном ωн=ω0·(1-Sн)
ΔРЭл.2=Рэм·δ=Мэм·ω0·S

 - определение электрических потерь в роторе вентилятора.
- определение электрических потерь в роторе вентилятора.
Величина Sкр определяется как производная от электрических потерь.

S1,2=1/3
Вверху диапазона регулирования скорости при S≤1/3 можно использовать принцип фазового регулирования скорости.
Если S→1/3, то получим окончательную формулу для определения потерь:
 .
.
1 Определили диапазон;
2 Определили ΔРэл2;
3 С учетом коэффициента запаса (λз) определяют мощность нового двигателя.
РнАД1≥λз·РнАД2.
Завышение мощности двигателя происходит в 2 – 2.5 раза.
|
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 432; Нарушение авторских прав?; Мы поможем в написании вашей работы!