КАТЕГОРИИ:
Архитектура-(3434)Астрономия-(809)Биология-(7483)Биотехнологии-(1457)Военное дело-(14632)Высокие технологии-(1363)География-(913)Геология-(1438)Государство-(451)Демография-(1065)Дом-(47672)Журналистика и СМИ-(912)Изобретательство-(14524)Иностранные языки-(4268)Информатика-(17799)Искусство-(1338)История-(13644)Компьютеры-(11121)Косметика-(55)Кулинария-(373)Культура-(8427)Лингвистика-(374)Литература-(1642)Маркетинг-(23702)Математика-(16968)Машиностроение-(1700)Медицина-(12668)Менеджмент-(24684)Механика-(15423)Науковедение-(506)Образование-(11852)Охрана труда-(3308)Педагогика-(5571)Полиграфия-(1312)Политика-(7869)Право-(5454)Приборостроение-(1369)Программирование-(2801)Производство-(97182)Промышленность-(8706)Психология-(18388)Религия-(3217)Связь-(10668)Сельское хозяйство-(299)Социология-(6455)Спорт-(42831)Строительство-(4793)Торговля-(5050)Транспорт-(2929)Туризм-(1568)Физика-(3942)Философия-(17015)Финансы-(26596)Химия-(22929)Экология-(12095)Экономика-(9961)Электроника-(8441)Электротехника-(4623)Энергетика-(12629)Юриспруденция-(1492)Ядерная техника-(1748)
Тяговые свойства вентильного ТД
|
|
|
|
Принцип действия вентильного ТД основан на взаимодействии магнитного поля, создаваемого обмоткой ротора, по которой протекает постоянный ток и током трехфазной обмотки статора, аналогичной обмотке асинхронного двигателя. Отсюда вытекает, что по сравнению с асинхронным ТД, вентильный ТД имеет несколько меньшую активную длину статора и ротора за счет контактных колец для передачи тока в обмотку ротора и требует несколько больших эксплуатационных расходов.
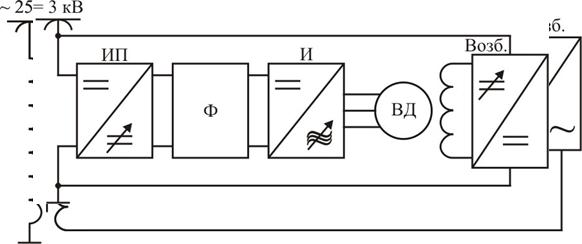
Схемы питания вентильных ТД на ЭПС постоянного и переменного тока аналогичны схемам питания АТД, однако для вентильных двигателей дополнительно требуется возбудитель, питающий обмотки ротора, и вместо автономного инвертора – зависимый.
Как известно из теории работы трехфазных статических преобразователей, в режиме инвертирования (тяговый режим вентильного двигателя) сигнал на отпирание полупроводниковых приборов необходимо подавать с некоторым опережением момента перехода через ноль ЭДС фазы, подключенной к коммутируемому плечу. Минимальное время опережения определяется длительностью коммутации g и временем восстановления вентильной прочности полупроводниковых приборов d.
При вращении ротора вентильного двигателя в обмотках статора наводится ЭДС за счет магнитного поля ротора. По аналогии с двигателем постоянного тока эту ЭДС называют ЭДС вращения. Полупроводниковый преобразователь работает как инвертор, ведомый сетью, причем в данном случае в качестве "сети" выступает ЭДС вращения. Обмотка статора вы
 |
полнена трехфазной, поэтому ЭДС вращения представляет собой трехфазную систему синусоидальных ЭДС.
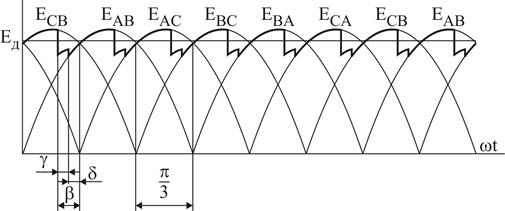
В рабочем диапазоне, т.е. между коммутациями ток протекает по обмоткам двух фаз, поэтому для расчета характеристик вентильного двигателя необходимо знать величину линейной ЭДС:
Ел = Емл×sinwt.
Величина Емл зависит от частоты вращения ротора, величины магнитного потока ротора и обмоточных данных статора.
Для получения средней величины ЭДС вращения Ед проинтегрируем кривую линейной ЭДС с учетом угла коммутации и угла запаса инвертора:
 .
.
Коэффициент  учитывает реакцию якоря, под которой в вентильном двигателе подразумевается реакция обмотки статора; коэффициент
учитывает реакцию якоря, под которой в вентильном двигателе подразумевается реакция обмотки статора; коэффициент  – коммутацию полупроводниковых приборов инвертора.
– коммутацию полупроводниковых приборов инвертора.
Амплитудное значение ЭДС вращения вентильного двигателя зависит от тех же параметров, что и у машин постоянного тока:
 ,
,
где р – число пар полюсов;
N – число активных проводников обмотки статора;
n – частота вращения ротора;
Ф – магнитный поток обмотки ротора.
Для упрощения выражения обозначим:
 – конструкционная постоянная двигателя;
– конструкционная постоянная двигателя;
 – коэффициент инвертирования.
– коэффициент инвертирования.
Тогда
Ед = СЕ n Ф ки.
В тяговом режиме подведенное к двигателю напряжение уравновешивается ЭДС вращения и падением напряжения на активном сопротивлении обмотки статора. С учетом падения напряжения в полупроводниковом преобразователе
Uд = Ед + Iд×Rэ + DUп.
Подставив в уравнение выражение для Ед, выразим частоту вращения:
 .
.
Так как во внекоммутационный период ток Iд протекает по обмоткам двух фаз обмотки статора, соединенных последовательно, а во время коммутации – по трем обмоткам, две из которых соединены параллельно, то среднее падение напряжения на активных сопротивлениях обмотки статора будет равно
 ,
,
где Rф – активное сопротивление обмотки одной фазы статора.
Формула, полученная для частоты вращения вентильного двигателя аналогична формуле частоты вращения двигателя постоянного тока. Вентильный двигатель иногда называют "коллекторным двигателем наоборот": в качестве обмотки главных полюсов выступает обмотка ротора; обмотки якоря – обмотка статора, а коллектора – полупроводниковый преобразователь.
Из формулы следует, что частоту вращения вентильного двигателя можно регулировать посредством величины питающего напряжения, магнитного потока ротора, т.е. тока возбуждения и коэффициента инвертирования. Поскольку использование вентильного двигателя на современном этапе развития техники подразумевает использование полупроводникового преобразователя с микропроцессорной системой управления, то теоретически возможно получить любой закон изменения частоты вращения от потребляемого тока. Практический интерес представляют следующие законы:
1. 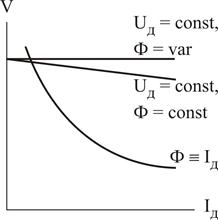 Ф = const; Uд = const. Скоростная характеристика аналогична характеристике двигателя независимого возбуждения.
Ф = const; Uд = const. Скоростная характеристика аналогична характеристике двигателя независимого возбуждения.
2. Uд = const; Ф = var. Скоростная характеристика зависит от закона регулирования магнитного потока. В случае регулирования магнитного потока пропорционально потребляемой мощности (Ф º Iд) – скоростная характеристика аналогична двигателю последовательного возбуждения.
3. n = const. Режим дает абсолютно жесткую характеристику. Интересен в случае поддержания постоянной скорости движения вне зависимости от профиля пути. Для реализации необходимо либо регулировать питающее напряжение, либо магнитный поток. Возможно получение режима постоянства частоты вращения посредством регулирования коэффициента инвертирования за счет изменения угла запаса инвертора d, однако при этом возрастают потери в статоре и преобразователе вследствие сильного искажения формы тока статора.
Вращающий момент вентильного двигателя можно выразить из электромагнитной мощности. С учетом потерь
 .
.
Так же, как и формула для частоты вращения, формула вращающего момента вентильного двигателя аналогична формуле момента двигателя постоянного тока. Вентильный двигатель имеет преимущество, по сравнению с асинхронным: его вращающий момент не зависит от уровня питающего напряжения.
На тяговые характеристики накладываются следующие ограничения:
- по сцеплению;
- по максимально допустимой скорости движения (конструкции механической части ЭПС);
- по коммутации. Вызвано тем, что угол коммутации  . Увеличение угла коммутации может быть вызвано увеличением реализуемой мощности (тока Iд) или влиянием реакции якоря при глубоком регулировании магнитного потока ротора;
. Увеличение угла коммутации может быть вызвано увеличением реализуемой мощности (тока Iд) или влиянием реакции якоря при глубоком регулировании магнитного потока ротора;
- по ослаблению возбуждения. Вследствие реакции якоря результирующий магнитный поток может начать снижаться, тем самым, уменьшая вращающий момент при росте тока Iд.
Рассмотрим алгоритм регулирования силы тяги вентильного тягового двигателя. Весь диапазон скоростей движения условно разобьем на три интервала:
1. 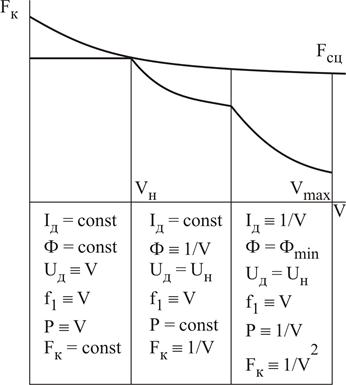 Регулирование напряжения (режим пуска). Для реализации максимального ускорения поезда желательно иметь максимальную силу тяги. Обеспечение этого режима осуществляется путем поддержания постоянства тока статора за счет увеличения питающего напряжения при неизменном потоке ротора. Хотя возможна реализация другого закона, например линейного, для приближения силы тяги к кривой ограничения по сцеплению (штриховая линия на рисунке).
Регулирование напряжения (режим пуска). Для реализации максимального ускорения поезда желательно иметь максимальную силу тяги. Обеспечение этого режима осуществляется путем поддержания постоянства тока статора за счет увеличения питающего напряжения при неизменном потоке ротора. Хотя возможна реализация другого закона, например линейного, для приближения силы тяги к кривой ограничения по сцеплению (штриховая линия на рисунке).
Так как частота вращения поля статора должна быть равна частоте вращения ротора, то по мере роста скорости движения (частоты вращения ротора) необходимо увеличивать частоту питающего напряжения. Это осуществляется системой управления по сигналам датчика положения ротора.
Величина магнитного потока ротора может быть как номинальной, так и выше номинальной (форсированный пуск). Максимальная величина магнитного потока ротора определяется насыщением магнитной системы двигателя.
2. Регулирование магнитного потока ротора (режим ослабления возбуждения). После достижения номинального напряжения питания частоту вращения ротора можно регулировать изменением магнитного потока ротора. В случае пуска с номинальным магнитным потоком номинальная скорость соответствует скорости выхода на номинальное напряжение питания. В случае форсированного пуска номинальная скорость выше скорости выхода на номинальное напряжение питания.
3. Регулирование частоты питающего напряжения (режим разгона). При достижении минимально допустимого магнитного потока ротора необходимо поддерживать постоянство соотношения магнитного потока ротора и тока статора. С ростом скорости частоту питающего напряжения необходимо повышать.
|
|
|
|
Дата добавления: 2014-01-07; Просмотров: 587; Нарушение авторских прав?; Мы поможем в написании вашей работы!